小海龟前行的action server示例
1. forward.action文件编写
service消息有两个区域
- request
- response
然而action消息有三个区域
- goal
- result
- feedback
以下是本例中创建的一个action消息
新建一个工作空间,创建一个名为forward_server的功能包,先进入/forward_server目录下创建一个action文件夹,在action文件夹下创建一个forward.action的文件,内容如下:
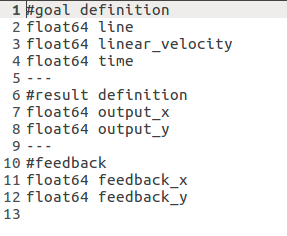
goal内容为:line(小乌龟前行的距离)、linear_velocity(小乌龟前行的速度)、time(用户设定前行的时间,规定时间内没有完成则退出)
result内容为:output_x(小乌龟前行结束终点的X坐标)、output_y(小乌龟前行结束终点的Y坐标)
feedback内容为:feedback_x(小乌龟前行过程中返回此时X坐标)、feedback_y(返回此时Y坐标)
action server提供一个实时的反馈,goal是请求、result(只能传一次)、feedback(多次传递)
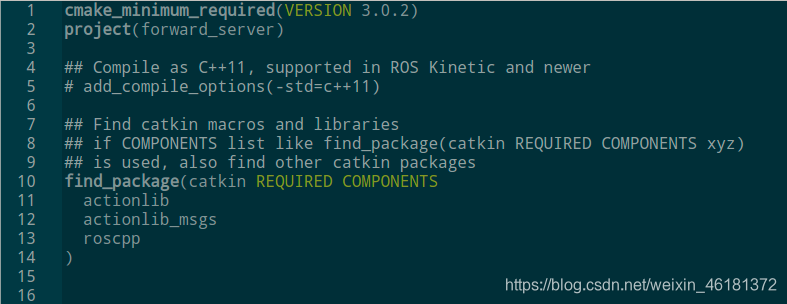
2. 修改CMakeLists.txt文件
2.1 find_package
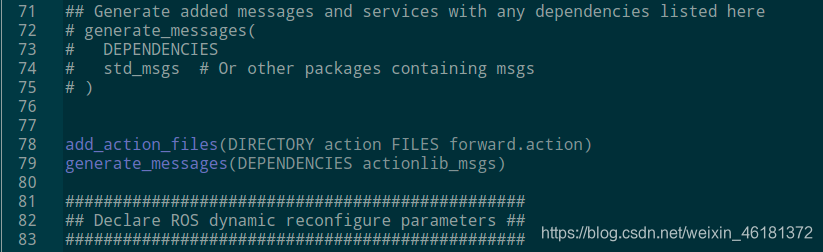
2.2 add_action_files、generate_message
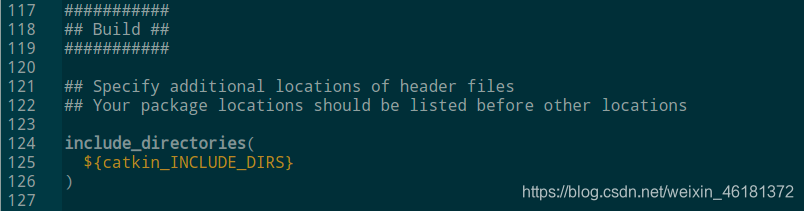
2.3 include_directories
3. 编译forward.action
- 对forward.action文件进行编译,在工作空间的devel/include/forward_server路径下生成下列头文件

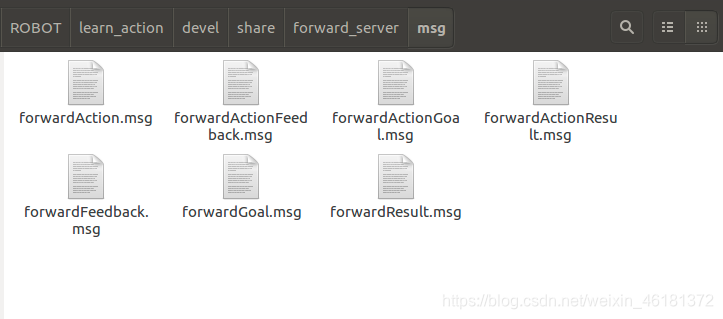
- 在工作空间的devel/share/forward_server/msg路径下生成下列.msg文件
4. forward.cpp编写
完整代码如下:
#include <ros/ros.h>
#include <turtlesim/Pose.h>
#include <geometry_msgs/Twist.h>
#include <actionlib/server/simple_action_server.h>
#include "forward_server/forwardAction.h"
ros::Subscriber pose_sub; //小乌龟位姿订阅者
ros::Publisher linear_velocity_pub; //小乌龟速度发布者
turtlesim::Pose nowps; //小乌龟现在的位姿 now pose
geometry_msgs::Twist lin_msg; //小乌龟的速度大小
float add_line,time_out; //小乌龟前行的距离 add_line、规定前行的时间time_out
//规定时间内没有运行结束则退出
//使用typedef为现有的SimpleActionServer模板类创建一个别名:Server
//消息类型为forward_server::forwardAction,即上部分定义的action消息类型
typedef actionlib::SimpleActionServer<forward_server::forwardAction> Server;
//收到action的goal后调用该回调函数,该回调函数包含两个参数:forwardGoal的常量指针goal、服务器的指针as
void execute(const forward_server::forwardGoalConstPtr& goal, Server* as)
{
//传入的参数linear_velocity、line、time赋值给前面定义的lin_msg、add_line、time_out
lin_msg.linear.x = goal->linear_velocity;
add_line = goal->line;
time_out = goal->time;
//声明用于发布的反馈(feedback)以及结果(result)
forward_server::forwardFeedback feedback;
forward_server::forwardResult result;
//打印出接收到的goal的内容
ROS_INFO("Goal: line [%f] , linear_velocity [%f], time[%f] ",
goal->line,goal->linear_velocity,goal->time);
//定义起始时间
ros::Time begin = ros::Time::now();
int count = 0;
//定义初始位置firstps
turtlesim::Pose firstps;
if(count == 0)
{
//赋值给初始位置firstps
firstps = nowps;
//打印出初始位置的信息
ROS_INFO_STREAM("The first pose X :"<<firstps.x<<"; Y :"<<firstps.y);
}
ros::Rate loop_rate(10);
while(ros::ok())
{
//定义距离:根号下(x2-x1)的平方加(y2-y1)的平方,即小乌龟运行到某点与小乌龟初始点之间的距离
float distance = sqrt((nowps.x-firstps.x)*(nowps.x-firstps.x)+(nowps.y-firstps.y)*(nowps.y-firstps.y));
//定义此刻时间
ros::Time now = ros::Time::now();
//此刻时间与起始时间作差,如果超出了用户设定时间则退出循环
//当client请求取消当前goal时,Server即as_调用setPreempted()函数
if(as->isPreemptRequested() || now.sec - begin.sec >= time_out)
{
ROS_INFO_STREAM("Exit!");
//设置action的状态为preempted
as->setPreempted();
break;
}
//如果此时小乌龟运行距离小于用户设定距离
else if(distance < add_line)
{
//发布前行指令
linear_velocity_pub.publish(lin_msg);
//给feedback变量赋值
feedback.feedback_x = nowps.x;
feedback.feedback_y = nowps.y;
//发布feedback变量
as->publishFeedback(feedback);
}
//如果小乌龟运行到指定位置
else
{
//打印出终点坐标
ROS_INFO_STREAM("The final pose X :"<<nowps.x<<"; Y :"<<nowps.y);
//给result变量赋值
result.output_x = nowps.x;pose_sub
result.output_y = nowps.y;
//设置action的状态为成功
as->setSucceeded(result);
break;
} pose_sub
count++;
loop_rate.sleep();
}
}
//小乌龟位姿接收者的回调函数
void poseCallback(const turtlesim::Pose pose)
{
nowps = pose;
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "forward_server");
ros::NodeHandle n;
//定义了一个服务器server,包含四个参数:节点句柄、服务器名称、回调函数execute(_1, &server)、false
//回调函数boost::bind( )详解参考:https://blog.csdn.net/weixin_46181372/article/details/110951454
//false的意思是暂时不启动这个server(在后面会启动这个server)
Server server(n, "forward", boost::bind(&execute, _1, &server), false);
pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
linear_velocity_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
//服务器开始运行
server.start();
ros::spin();
return 0;
}
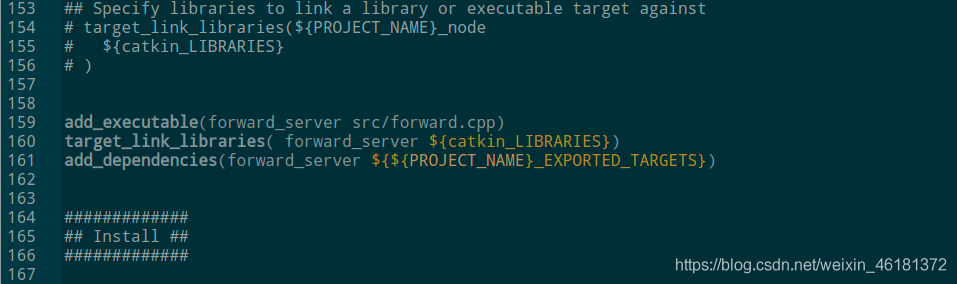
5. 修改CMakeList.txt文件
添加图片中的add_executable()、target_link_libraries()、add_dependencies()
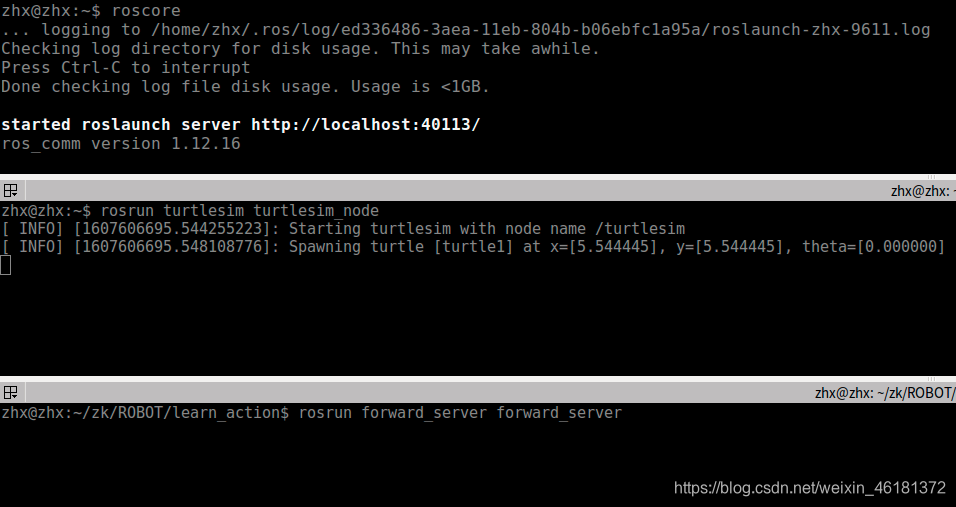
6. 编译并运行
roscore
rosrun turtlesim turtlesim_node
rosrun forward_server forward_server
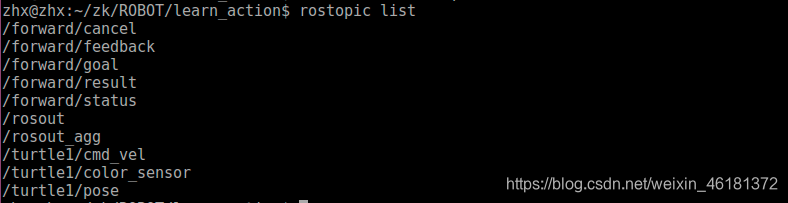
rostopic list
rostopic pub -1 /forward/goal 双击Tab键补全后面内容
自行修改line、linear_velocity、time的数值,如图所示: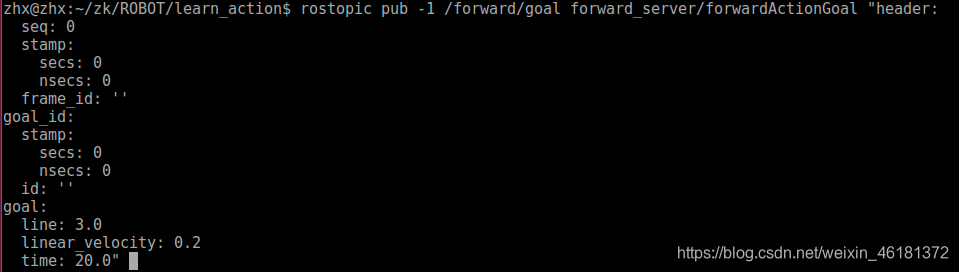
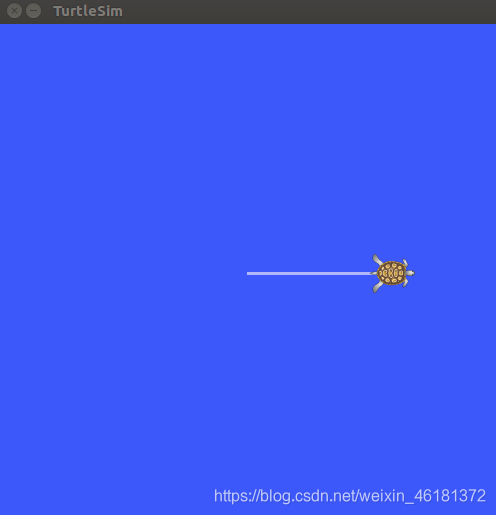
运行结果:
终端打印出起始位置、终止位置

小乌龟前行距离为3.0
小乌龟前行过程中可以查看话题/forward/feedback、/forward/result
rostopic echo /forward/feedback
rostopic echo /forward/result
