2020-5-20-6.1-系统的设计与校正问题
文章目录
0. 校正的概述
控制系统的校正
- 条件:控制系统的结构、参数已确定
- 原因:对控制系统所提的性能要求尚未满足
- 工作:设计、计算附加校正装置和元件
- 目的:使系统的性能指标达到要求
1. 校正的方式
1.1 串联校正(最常用)

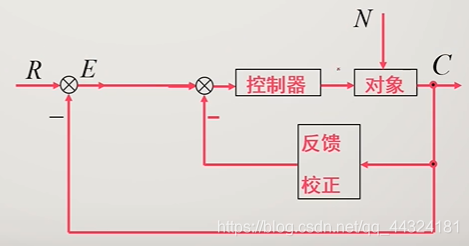
1.2 反馈校正(比较常用)
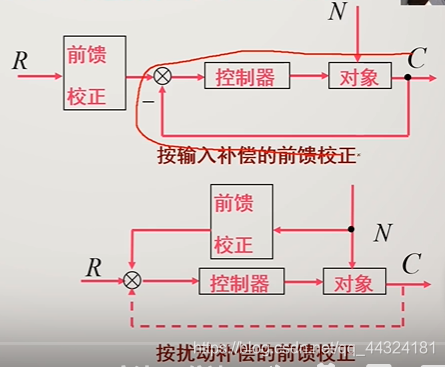
1.3 前馈校正
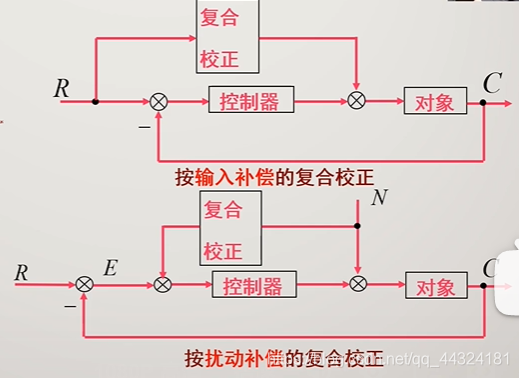
1.4 复合校正
2. 两种设计方法
- 若性能指标以单位阶跃响应的时域特征量(峰值时间、超调量、调节时间等)给出,一般采用时域法校正。
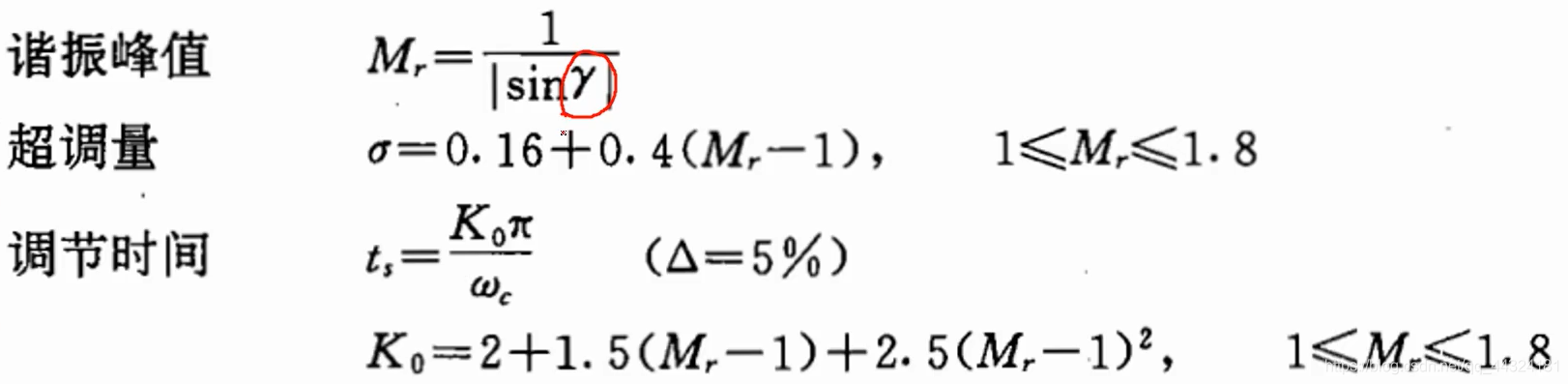
- 若性能指标以系统的频域特征量(相角裕度、谐振峰值、闭环带宽等)给出,一般采用频率法校正。
- 目前工程技术界多习惯采用频率法,故常常要通过近似公式进行两种指标的互换。
3. 系统带宽的选择
- 输入信号:一般是低频信号
- 噪声信号:一般是高频信号
- 一个运行良好的系统的要求:
- 相角裕度:45°左右
- 开环对数幅频特性在中频区的斜率:-20dB/dec
- 中频区:占有一定的频率范围
- 过中频区后:系统幅频特性迅速衰减
4. 基本控制规律
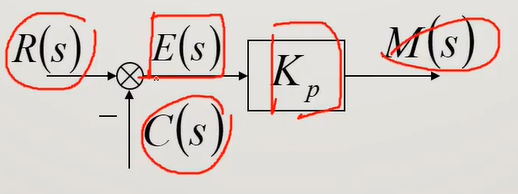
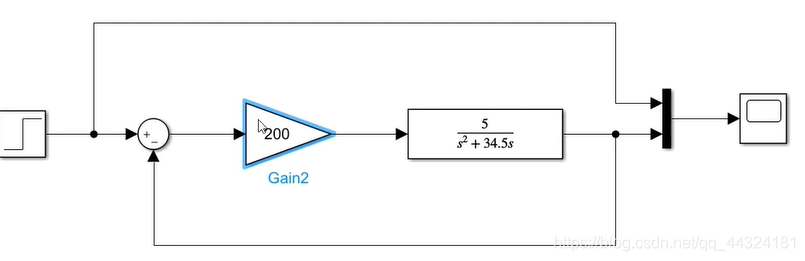
4.1 比例控制(P控制)
- P控制器实质上是一个具有可调增益的放大器。在串联校正中,加大增益可以:
- 提高系统开环增益;
- 减小系统稳态误差;
- 降低系统相对稳定性,甚至造成系统闭环不稳定。
- 只有一个比例系数可调,调节能力有限(不能兼顾响应速度与超调量);
- 比例控制容易出现超调;
- 减少系统的稳态误差(与静态误差系数法相关);
- 降低系统的稳定裕度。
- 比例控制很少单独使用!
4.2 比例-微分控制(PD控制)
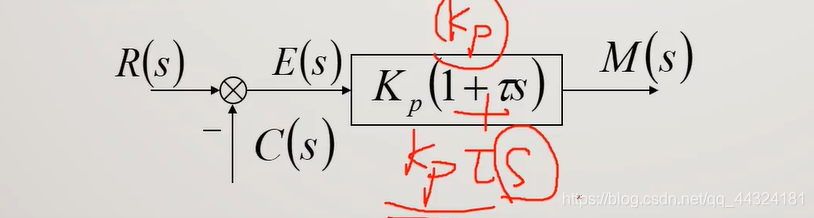
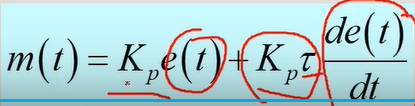
其中, τ \tau τ存在的意义就是使得两个 K p K_{p} Kp不一样。
- 由于引入了微分控制,可以提前预知偏差量的变化趋势,以便于提前控制;
- 提升系统的阻尼程度,改善系统的稳定性。
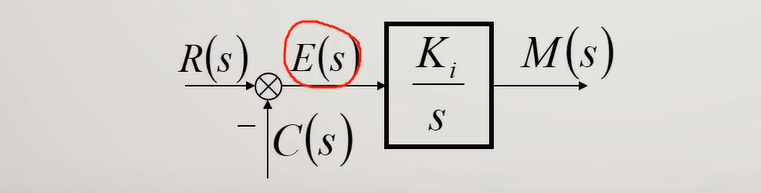
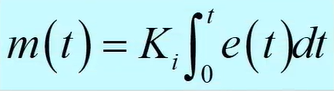
4.3 积分控制(I控制)
- I 控制器的输出信号与输入信号的积分成正比关系。
- 在串联校正时,采用 I 控制器可:
- 提高开环系统的型别,有利于稳态性能提高;
- 为系统带来了一个位于原点的开环极点,产生90°的滞后相角,不利于系统的稳定性。
- 在系统的前向通路上引入积分环节,可以有效减少系统的稳态误差;
- 每个积分环节会有 -90° 的相角,所以增加积分环节不利于系统的稳定性。
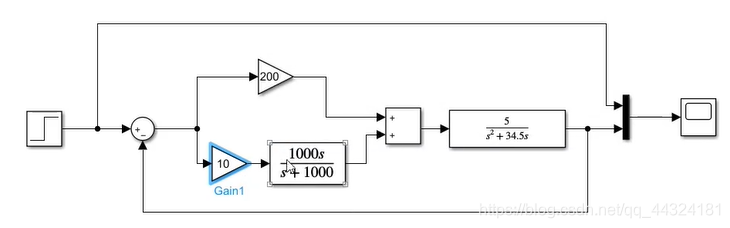
4.4 比例-积分-微分控制(PID)
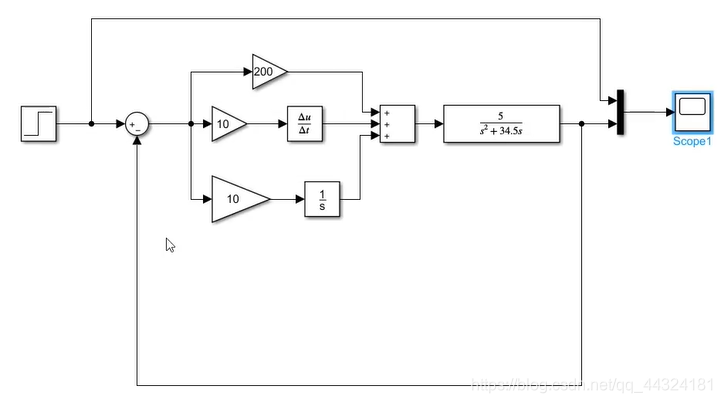
- MATLAB有PID模块,带自动调节功能;
- 手动调节:
- 先调 P 控制,要有超调;
- 再慢慢加 D,直到响应达到满意;
- 如果有稳态误差,加一点点 I 。
下一篇:线性系统的校正方法