章节安排
1. 数学基础部分(1~6)
- 第一讲介绍这本书的基本信息,习题部分主要包括一些自测题。
- 第二讲为 SLAM 系统概述,介绍一个 SLAM 系统由哪些模块组成,各模块的具体工作是什么。实践部分介绍编程环境的搭建过程以及 IDE 的使用。
- 第三讲介绍三维空间运动,接触旋转矩阵、四元数、欧拉角的相关知识,并且在 Eigen 当中使用它们。
- 第四讲为李群和李代数。学习李代数的定义和使用方式,然后通过 Sophus 操作它们。
- 第五讲介绍针孔相机模型以及图像在计算机中的表达。用 OpenCV 来调取相机的内外参数。
- 第六讲介绍非线性优化,包括状态估计理论基础、最小二乘问题、梯度下降方法。完成一个使用 Ceres 和 g2o 进行曲线拟合的实验。
2. SLAM技术部分(7~14)
- 第七讲为特征点法的视觉里程计。该讲内容比较多,包括特征点的提取与匹配、对极几何约束的计算、PnP 和 ICP 等。在实践中,用这些方法去估计两个图像之间的运动。
- 第八讲为直接法的视觉里程计。学习光流和直接法的原理,然后利用 g2o实现一个简单的 RGB-D 直接法。
- 第九讲为视觉里程计的实践章,将搭建一个视觉里程计框架,综合应用先前学过的知识,实现它的基本功能。从中会碰到一些问题,例如优化的必要性、关键帧的选择等。
- 第十讲为后端优化,主要为 Bundle Adjustment 的深入讨论,包括基本的 BA以及如何利用稀疏性加速求解过程。将用 Ceres 和 g2o 分别书写一个 BA 程序。
- 第十一讲主要讲后端优化中的位姿图。位姿图是表达关键帧之间约束的一种更紧凑的形式。将用 g2o 和 gtsam 对一个位姿球进行优化。
- 第十二讲为回环检测,主要介绍以词袋方法为主的回环检测。使用dbow3 书写字典训练程序和回环检测程序。
- 第十三讲为地图构建。我们会讨论如何使用单目进行稠密深度图的估计(以及这是多么不可靠),然后讨论 RGB-D 的稠密地图构建过程。书写极线搜索与块匹配的程序,然后在 RGB-D 中遇到点云地图和八叉树地图的构建问题。
- 第十四讲主要介绍当前的开源 SLAM 项目以及未来的发展方向。
第一讲 前言和简介
什么是SLAM:
SLAM 是 Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。
第二讲 初识SLAM
相机:
- 以二维投影形式记录三维世界的信息
- 丢掉了一个维度——距离
三种视觉SLAM中主要的相机:
- 单目相机:没有深度,必须通过移动相机产生深度(近处物体的像运动快,远处物体的像运动慢)
- 双目相机:通过两个眼睛的视差计算深度(近处物体差别大,远处物体差别小),计算量很大
- RGBD相机:通过物理方法测量深度,知道每个点的深度
主动测量,功耗很大
结构光TOF
深度值比较准确
量程小,易受干扰(很多RGBD用的是红外光,会受太阳光干扰,因此室外还是要用单目和双目,RGBD不太行)
视觉SLAM框架
- 传感器信息读取:在视觉 SLAM 中主要为相机图像信息的读取和预处理。如果在机器人中,还可能有码盘、惯性传感器等信息的读取和同步。
- 视觉里程计 (Visual Odometry, VO):视觉里程计任务是估算相邻图像间相机的运动,以及局部地图的样子。VO 又称为前端(Front End)。
分为基于特征点法的视觉里程计(第七讲)和基于直接法的视觉里程计(第八讲) - 后端非线性优化(Optimization):后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对他们进行优化,得到全局一致的地图。由于在VO之后,又被称为后端(Back End)
(只要前端里有误差的东西,都可以放到后端进行优化)
主流方式:前期是以滤波器为代表的滤波的方法(EKF),现在是以图优化为代表的优化的方法
第六讲整体介绍,第十讲和第十一讲详细介绍图优化、捆集调整、位姿图 - 回环检测(Loop Closure Detection):回环检测机器人是否到达过先前的位置,如果检测到回环,它会把信息提供给后端进行处理。
主流方法:词袋模型(十二讲) - 建图(mapping):它根据估计的轨迹,建立与任务要求对应的地图
(十三讲)
SLAM问题的数学描述
运动方程:
通常,机器人会携带一个测量自身运动的传感器,比如说码盘或惯性传感器。这个传感器可以测量有关运动的读数,但不一定直接是位置之差,还可能是加速度、角速度等信息

其中Xk是当前位置,Xk-1是上一时刻位置,uk是输入,wk是噪声
运动方程只有在带有运动传感器的时候才存在
观测方程:
观测方程描述的是,当小萝卜在 xk 位置上看到某个路标点 yj,产生了一个观测数据 zk,j

观测方程的数量是不一定的,取决于xk那个时刻看到了多少个路标y
cmake
CmakeList.txt
常用框架如下
目录结构如下:
├── test目录
│ ├── CMakeLists.txt
│ ├── bin目录(存放生成的可执行文件)
│ ├── include目录
│ │ ├── file1.h
│ ├── src 目录
│ │ ├── main.cpp
│ │ ├── file1.cpp
│ ├── build目录
# 声明要求的 cmake 最低版本
#这行命令是可选的,我们可以不写这句话,但在有些情况下,如果 CMakeLists.txt 文件中使用了一些高版本 cmake 特有的一些命令的时候,就需要加上这样一行,提醒用户升级到该版本之后再执行 cmake。
cmake_minimum_required( VERSION 2.8 )
# 声明一个 cmake 工程名称
project( 01 )
# 设置编译模式,可以选择Debug或者Release
set( CMAKE_BUILD_TYPE "Debug" )
set(CMAKE_CXX_FLAGS_DEBUG "$ENV{CXXFLAGS} -O0 -Wall -g2 -ggdb")
set(CMAKE_CXX_FLAGS_RELEASE "$ENV{CXXFLAGS} -O3 -Wall")
# 添加一个可执行程序
# 语法:add_executable( 程序名 源代码文件 )
add_executable( main src/main.cpp )
#将可执行文件输出到文件夹bin中,方便管理
set(EXECUTABLE_OUTPUT_PATH ${
PROJECT_SOURCE_DIR}/bin)
# 包含头文件所在目录
include_directories(${
PROJECT_SOURCE_DIR}/include)
# 添加一个库,默认为静态链接库
# add_library( namesp src/namesp.cpp )
# 添加一个动态共享库
add_library( file1_shared SHARED src/file1.cpp )
# 将库文件链接到可执行程序上
target_link_libraries( main file1_shared )
其他
在写.h文件的时候,可以使用 编译预处理指令#pragma once代替ifndef #define,他们的效果是一样的,但是更简洁
使用#progma once
#pragma once
// Code placed here is included only once per translation unit
使用宏定义方式
#ifndef HEADER_H_
#define HEADER_H_
// Code placed here is included only once per translation unit
#endif // HEADER_H_
第三讲 三维空间刚体运动
- 本讲主要介绍:一个刚体在三维空间中的运动是如何描述的
-
- 理论部分:介绍旋转矩阵、四元数、欧拉角的意义,以及它们是如何运算和转换的
-
- 实践部分:将介绍线性代数库 Eigen。它提供了 C++ 中的矩阵运算,并且它的 Geometry 模块还提供了四元数等刚体运动的描述。
3.1 旋转矩阵
向量的运算
对于向量a,b
- 内积:

内积可以描述向量间的投影关系 - 外积

外积的方向垂直于这两个向量,大小为 |a| |b| sin ⟨a, b⟩,是两个向量张成的四边形的有向面积.
我们引入了^符号,把 a 写成一个矩阵.这样就把外积 a × b,写成了矩阵与向量的乘法 a ∧ b,把它变成了线性运算.
注意:外积只对三维向量存在定义,我们还能用外积表示向量的旋转
欧式变换
- 欧氏变换:相机运动是一个刚体运动,它保证了同一个向量在各个坐标系下的长度和夹角都不会发生变化。这种变换称为欧氏变换
- 旋转矩阵:
旋转矩阵R的充要条件:
①R是一个正交阵,矩阵的逆和转置相等
②|R| = 1
3.2 齐次坐标和变换矩阵
-
齐次坐标:我们把一个三维向量的末尾添加 1,变成了四维向量,称为齐次坐标。对于这个四维向量,我们可以把旋转和平移写在一个矩阵里面,使得整个关系变成了线性关系。
-
变换矩阵:上式中的T称为变换矩阵
3.3 旋转向量和欧拉角
旋转向量
使用矩阵方式(旋转矩阵和变换矩阵)表示三维刚体运动的缺陷:
- SO(3) 的旋转矩阵有九个量,但一次旋转只有三个自由度。因此这种表达方式是冗余的。同理,变换矩阵用十六个量表达了六自由度的变换。
- 旋转矩阵自身带有约束:它必须是个正交矩阵,且行列式为 1。变换矩阵也是如此。当我们想要估计或优化一个旋转矩阵/变换矩阵时,这些约束会使得求解变得更困难。
旋转向量:任意旋转都可以用一个旋转轴和一个旋转角来刻画。于是,我们可以使用一个向量,其方向与旋转轴一致,而长度等于旋转角。这种向量,称为旋转向量。
罗德里格斯公式:
罗德里格斯公式实现了从旋转向量到旋转矩阵的转换

欧拉角
- 它使用了三个分离的转角,把一个旋转分解成三次绕不同轴的旋转。
- 欧拉角当中比较常用的一种,是用“偏航-俯仰-滚转”(yaw-pitch-roll)三个角度来描述一个旋转。
- 欧拉角存在“万向锁”问题:在俯仰角为±90◦ 时,第一次旋转与第三次旋转将使用同一个轴,使得系统丢失了一个自由度。

四元数
旋转矩阵用九个量描述三自由度的旋转,具有冗余性;欧拉角和旋转向量是紧凑的,但具有奇异性。
引入一种和数学中复数类似的数,
数学中的复数:乘上复数 i 相当于逆时针把一个复向量旋转 90 度。
四元数正是在表达三维空间旋转时的一种类似的代数
优点:它既是紧凑的,也没有奇异性。
缺点:四元数不够直观,运算较为复杂
定义:
- 一个四元数 q 拥有一个实部和三个虚部。

其中 i, j, k 为四元数的三个虚部。这三个虚部满足关系式:

由于它的这种特殊表示形式,有时人们也用一个标量和一个向量来表达四元数:

这里,s 称为四元数的实部,而 v 称为它的虚部。如果一个四元数虚部为 0,称之为实四元数。反之,若它的实部为 0,称之为虚四元数。
3.4 Eigen库
环境需求
- Eigen库的安装
使用以下命令
sudo apt-get install libeigen3-dev
- 在CmakeLists里包含eigen头文件
添加下面这一行,(一般来说路径都是这个)
include_directories( "/usr/include/eigen3" )
- 在cpp文件里包含头文件
// Eigen 部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
基本语法
#include <iostream>
using namespace std;
#include <ctime>//包含计时的函数,在本程序中用来对比两种方程求解方法的运算速度
// Eigen 部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
#define MATRIX_SIZE 50
/****************************
* 本程序演示了 Eigen 基本类型的使用
****************************/
int main( int argc, char** argv )
{
// Eigen 中所有向量和矩阵都是Eigen::Matrix,它是一个模板类。它的前三个参数为:数据类型,行,列
// 声明一个2*3的float矩阵
Eigen::Matrix<float, 2, 3> matrix_23;
// 同时,Eigen 通过 typedef 提供了许多内置类型,不过底层仍是Eigen::Matrix
// 例如 Vector3d 实质上是 Eigen::Matrix<double, 3, 1>,即三维向量
Eigen::Vector3d v_3d;
// 这是一样的
Eigen::Matrix<float,3,1> vd_3d;
// Matrix3d 实质上是 Eigen::Matrix<double, 3, 3>
Eigen::Matrix3d matrix_33 = Eigen::Matrix3d::Zero(); //初始化为零
// 如果不确定矩阵大小,可以使用动态大小的矩阵
Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > matrix_dynamic;
// 更简单的
Eigen::MatrixXd matrix_x;
// 这种类型还有很多,我们不一一列举
// 下面是对Eigen阵的操作
// 输入数据(初始化)
matrix_23 << 1, 2, 3, 4, 5, 6;
// 输出
cout << matrix_23 << endl;
// 用()访问矩阵中的元素
for (int i=0; i<2; i++) {
for (int j=0; j<3; j++)
cout<<matrix_23(i,j)<<"\t";
cout<<endl;
}
// 矩阵和向量相乘(实际上仍是矩阵和矩阵)
v_3d << 3, 2, 1;
vd_3d << 4,5,6;
// 但是在Eigen里你不能混合两种不同类型的矩阵,像这样是错的
// Eigen::Matrix<double, 2, 1> result_wrong_type = matrix_23 * v_3d;
// 应该显式转换
Eigen::Matrix<double, 2, 1> result = matrix_23.cast<double>() * v_3d;
cout << result << endl;
Eigen::Matrix<float, 2, 1> result2 = matrix_23 * vd_3d;
cout << result2 << endl;
// 同样你不能搞错矩阵的维度
// 试着取消下面的注释,看看Eigen会报什么错
// Eigen::Matrix<double, 2, 3> result_wrong_dimension = matrix_23.cast<double>() * v_3d;
// 一些矩阵运算
// 四则运算就不演示了,直接用+-*/即可。
matrix_33 = Eigen::Matrix3d::Random(); // 随机数矩阵
cout << matrix_33 << endl << endl;
cout << matrix_33.transpose() << endl; // 转置
cout << matrix_33.sum() << endl; // 各元素和
cout << matrix_33.trace() << endl; // 迹
cout << 10*matrix_33 << endl; // 数乘
cout << matrix_33.inverse() << endl; // 逆
cout << matrix_33.determinant() << endl; // 行列式
// 特征值
// 实对称矩阵可以保证对角化成功
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> eigen_solver ( matrix_33.transpose()*matrix_33 );
cout << "Eigen values = \n" << eigen_solver.eigenvalues() << endl;
cout << "Eigen vectors = \n" << eigen_solver.eigenvectors() << endl;
// 解方程
// 我们求解 matrix_NN * x = v_Nd 这个方程
// N的大小在前边的宏里定义,它由随机数生成
// 直接求逆自然是最直接的,但是求逆运算量大
Eigen::Matrix< double, MATRIX_SIZE, MATRIX_SIZE > matrix_NN;
matrix_NN = Eigen::MatrixXd::Random( MATRIX_SIZE, MATRIX_SIZE );
Eigen::Matrix< double, MATRIX_SIZE, 1> v_Nd;
v_Nd = Eigen::MatrixXd::Random( MATRIX_SIZE,1 );
clock_t time_stt = clock(); // 计时
// 直接求逆
Eigen::Matrix<double,MATRIX_SIZE,1> x = matrix_NN.inverse()*v_Nd;
cout <<"time use in normal inverse is " << 1000* (clock() - time_stt)/(double)CLOCKS_PER_SEC << "ms"<< endl;
// 通常用矩阵分解来求,例如QR分解,速度会快很多
time_stt = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
cout <<"time use in Qr decomposition is " <<1000* (clock() - time_stt)/(double)CLOCKS_PER_SEC <<"ms" << endl;
return 0;
}
第四讲 李群和李代数
群
-
群的定义
群(Group)是一种集合加上一种运算的代数结构。我们把集合记作 A,运算记作 ·,那么群可以记作 G = (A, ·)。群要求这个运算满足以下几个条件:
1.封闭性: ∀a1, a2 ∈ A, a1 · a2 ∈ A.
2.结合律: ∀a1, a2, a3 ∈ A, (a1 · a2) · a3 = a1 · (a2 · a3).
3.幺元: ∃a0 ∈ A, s.t. ∀a ∈ A, a0 · a = a · a0 = a.
4.逆: ∀a ∈ A, ∃a−1 ∈ A, s.t. a · a−1 = a0. -
群的例子:
实数关于加法是一个群,封闭性和结合律不必说,这个群的幺元是0,逆就是数a的相反数。 -
常见的群
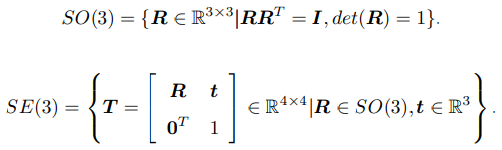
一般线性群 GL(n) 指 n × n 的可逆矩阵,它们对矩阵乘法成群。
特殊正交群 SO(n) 也就是所谓的旋转矩阵群,其中 SO(2) 和SO(3) 最为常见。
特殊欧氏群 SE(n) 也就是前面提到的 n 维欧氏变换,如 SE(2) 和 SE(3)。
李群
- 李群
李群是指具有连续(光滑)性质的群。
像整数群 Z 那样离散的群没有连续性质,所以不是李群。而 SO(n) 和 SE(n),它们在实数空间上是连续的。 - 李群的例子
三维旋转矩阵构成了特殊正交群 SO(3),而变换矩阵构成了特殊欧氏群 SE(3)
李代数
-
李代数
每个李群都有与之对应的李代数。李代数描述了李群的局部性质。通用的李代数的定义如下:
李代数由一个集合 V,一个数域 F 和一个二元运算 [, ] 组成。如果它们满足以下几条性质,称 (V, F, [ , ]) 为一个李代数,记作 g。
1.封闭性: ∀X,Y ∈ V, [X,Y ] ∈ V.
2.双线性: ∀X,Y , Z ∈ V, a, b ∈ F, 有:[aX + bY , Z] = a[X, Z] + b[Y , Z], [Z, aX + bY ] = a[Z, X] + b[Z,Y ].
3.自反性: ∀X ∈ V, [X, X] = 0.
4.雅可比等价: ∀X,Y , Z ∈ V, [X, [Y , Z]] + [Z, [Y , X]] + [Y , [Z, X]] = 0.其中的二元运算被称为李括号。李括号表达了两个元素的差异。
-
李代数的例子:三维向量 R3 上定义的叉积 × 是一种李括号,因此 g = (R3, R, ×) 构成了一个李代数。
李代数so(3)
- 李代数so(3)是定义在R3上的三维向量,记作 ϕ

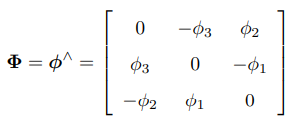
- 李代数so(3)的李括号为

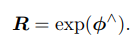
- 李群SO(3)与李代数so(3)的映射关系为指数映射
李代数se(3)
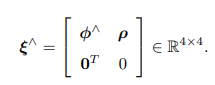
- 与so(3)类似,se(3)是定义在R6空间上的六维向量,记作ξ。
它的前三维为平移,记作 ρ;后三维为旋转,记作 ϕ,实质上是 so(3) 元素。

- 李代数的上尖∧
在 se(3) 中,同样使用 ∧ 符号,将一个六维向量转换成四维矩阵,但这里不再表示反对称.
- 李代数的李括号

其中下尖∨与上尖∧相反,表示“从矩阵到向量”的关系
指数与对数映射
SO(3)和so(3)
- 从so(3)到SO(3)的指数映射
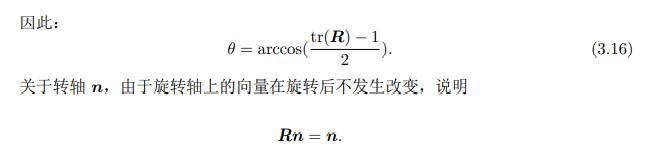
ϕ 是三维向量,我们可以定义它的模长和它的方向,分别记作 θ 和 a,于是有 ϕ = θa,则从so(3)到SO(3)的指数映射可以表示为:

这个式子是不是看起来很眼熟,没错它就是我们在上一章学过的罗德里格斯公式 - 从SO(3)到so(3)的对数映射
按照定义可以写出如下的映射关系(但通常我们不这么算)
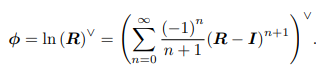
通常我们用上一章中讲过的这种计算方式
SE(3)和se(3)
-
从se(3)到SE(3)的指数映射
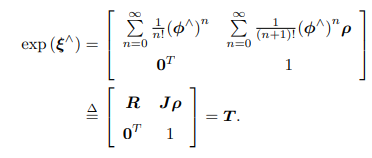
其中

我们看到,平移部分经过指数映射之后,发生了一次以 J 为系数矩阵的线性变换 -
从SE(3)到se(3)的指数映射
ξ=ln(T) ∨
根据变换矩阵 T 求 so(3) 上的对应向量也有更省事的方式:从左上的 R 计算旋转向量,而右上的 t 满足:t = Jρ
由于 J 可以由 ϕ 得到,所以这里的 ρ 亦可由此线性方程解得。
SO(3), SE(3), so(3), se(3) 的对应关系

李代数求导与扰动模型
BCH 公式与近似形式
-
BCH公式
注意,对于矩阵,以下这个式子并不成立

两个李代数指数映射乘积的完整形式,由 Baker-Campbell-Hausdorff 公式(BCH 公式)给出。由于它完整的形式较复杂,我们给出它展开式的前几项

其中 [,] 为李括号。 -
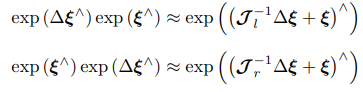
SO(3)上的近似形式

当ϕ1为小量时称为左乘,ϕ2为小量时称为右乘
左乘 BCH 近似雅可比 Jl:

它的逆为

右乘雅可比Jr仅需要对自变量取负号即可
-
SE(3)上的近似形式
BCH近似的意义
假定对某个旋转 R,对应的李代数为 ϕ。我们给它左乘一个微小旋转,记作 ∆R,对应的李代数为 ∆ϕ。那么,在李群上,得到的结果就是 ∆R · R,而在李代数上,根据 BCH近似,为:Jl-1(ϕ)∆ϕ + ϕ。合并起来,可以简单地写成:

反之在李代数上进行加法:

SO(3) 李代数上的求导
有两种模型,导数模型和扰动模型
- 导数模型:用李代数表示姿态,然后对根据李代数加法来对李代数求导。
- 扰动模型:对李群左乘或右乘微小扰动,然后对该扰动求导,称为左扰动和右扰动模型。
假设我们对一个空间点 p 进行了旋转,得到了 Rp
- 导数模型
- 扰动模型(左乘为例)
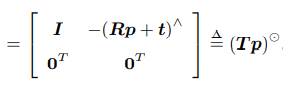
SE(3)上的李代数求导(扰动模型)

第五讲 相机与图像
5.1 针孔相机模型
5.1.1 推导过程

-
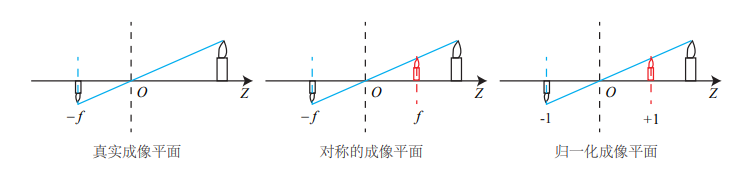
O − x − y − z 为相机坐标系;实际物体点P在相机坐标系中的坐标为[X,Y,Z]T,投影到O’-X’-Y’平面上的点P’坐标为[X’,Y’,Z’]T,则有
-
我们把像投影到前方(这样可以去掉负号)
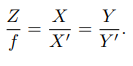
整理得
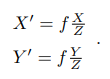
-
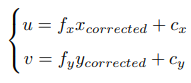
相机坐标系到像素坐标系
设像素坐标为[u,v]T
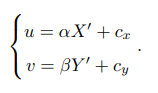
进一步地
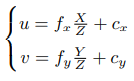
最终得到
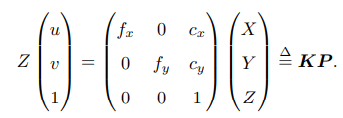
其中K称为内参数矩阵
内参:通常认为,相机的内参在出厂之后是固定的,不会在使用过程中发生变化,我们把它看做相机的固有属性,所以称为内参。 -
将相机坐标P转换为世界坐标PW
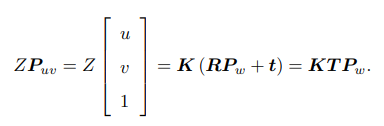
其中T称为外参数矩阵
注意:上式隐含了一次从齐次坐标到非齐次坐标的转换(KTPW是一个41的,而等号左边是31的) -
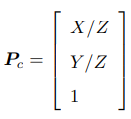
P点的归一化处理
将P点归一化到Z=1的归一化平面上,的到归一化坐标PC
5.1.2 参和外参的含义
内参矩阵K表示了从归一化的相机坐标到像素坐标的变换
外参矩阵T(或R,t)表示了从世界坐标到相机坐标的变换
5.2 相机的畸变
畸变通常包含两种:径向畸变和切向畸变
5.2.1 径向畸变
- 来源
由透镜形状引起的畸变称之为径向畸变 - 主要类型
主要包括,桶形畸变和枕形畸变

桶形畸变是由于图像放大率随着离光轴的距离增加而减小,而枕形畸变却恰好相反。
在这两种畸变中,穿过图像中心和光轴有交点的直线还能保持形状不变。 - 矫正公式
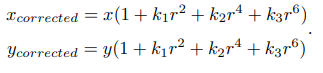
本公式都是指归一化平面上的点,其中 r 表示点 p 离坐标系原点的距离
5.2.2 切向畸变
- 来源
切向畸变来源于透镜和成像面不平行

- 矫正公式
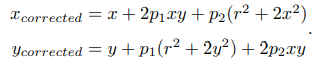
本公式都是指归一化平面上的点,其中 r 表示点 p 离坐标系原点的距离,θ 表示和水平轴的夹角
5.2.3 畸变的矫正
- 将三维空间点投影到归一化图像平面。设它的归一化坐标为 [x, y]T
- 对归一化平面上的点进行径向畸变和切向畸变纠正

- 将纠正后的点通过内参数矩阵投影到像素平面,得到该点在图像上的正确位置
5.3 单目相机成像过程
- 首先,世界坐标系下有一个固定的点 P,世界坐标为 PW;
- 由于相机在运动,它的运动由 R, t 或变换矩阵 T ∈ SE(3) 描述。P 的相机坐标为:P˜c = RPW + t。
(这里应该是Pc头顶上有个波浪,但是笔者太菜,打不出来,大家知道就好) - 这时的 P˜c仍有 X, Y, Z 三个量,把它们投影到归一化平面 Z = 1 上,得到 P 的归一化相机坐标:Pc = [X/Z, Y /Z, 1]T
- 最后,P 的归一化坐标经过内参后,对应到它的像素坐标:Puv = KPc
5.4 双目相机
- 双目相机成像模型

OL, OR为左右光圈中心,蓝色框为成像平面,f 为焦距。uL 和 uR 为成像平面的坐标。请注意按照图中坐标定义,uR 应该是负数,所以图中标出的距离为 −uR。 - 距离计算公式
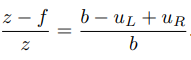
整理得
这里 d 为左右图的横坐标之差,称为视差(Disparity) - 双目相机量程
由于视差最小为一个像素,于是双目的深度存在一个理论上的最大值,由 fb 确定。因此通常来说想要测的远,相机就会更大
5.5 RGBD相机
目前的 RGB-D 相机按原理可分为两大类:
- 通过红外结构光(Structured Light)来测量像素距离的。例子有 Kinect 1 代、ProjectTango 1 代、Intel RealSense 等;
- 通过飞行时间法(Time-of-flight, ToF)原理测量像素距离的。例子有 Kinect 2 代和一些现有的 ToF 传感器等。

本讲当中还有关于图像的基本知识和OpenCV的相关知识,可以参见笔者另一篇文章OpenCV相关知识.