Q17:laplacian滤波
laplacian 是边缘检测的一种,算子如下
代码如下
#include"opencv2/core/core.hpp"
#include"opencv2/highgui/highgui.hpp"
#include<opencv2/opencv.hpp>
#include "math.h"
#include"iostream"
using namespace std;
using namespace cv;
#define Kernel_size 3
Mat laplacian3(Mat img){
//构建3*3滤波系数矩阵
double K[Kernel_size][Kernel_size] = {
{0,1,0},{1,-4,1},{0,1,0}};
int imgrow = img.rows;
int imgcol = img.cols;
Mat out = Mat::zeros(imgrow,imgcol,CV_8UC1);
int dot = floor((float)(Kernel_size/2));
int v;
for(int i=floor((float)(Kernel_size/2));i<imgrow-floor((float)(Kernel_size/2));i++){
for(int j=floor((float)(Kernel_size/2));j<imgcol-floor((float)(Kernel_size/2));j++){
v = 0;
for(int i_=-dot;i_<dot+1;i_++){
for(int j_=-dot;j_<dot+1;j_++){
v += img.at<uchar>(i+i_,j+j_)*K[i_+dot][j_+dot];
}
}
if(v>=0)
out.at<uchar>(i,j) = v;
else
out.at<uchar>(i,j) = -v;
}
}
return out;
}
void main(){
Mat img = imread("ck567.jpg",IMREAD_GRAYSCALE);
Mat out1 = laplacian3(img);
imshow("laplacian3",out1);
imshow("original-pic",img);
waitKey(0);
destroyAllWindows();
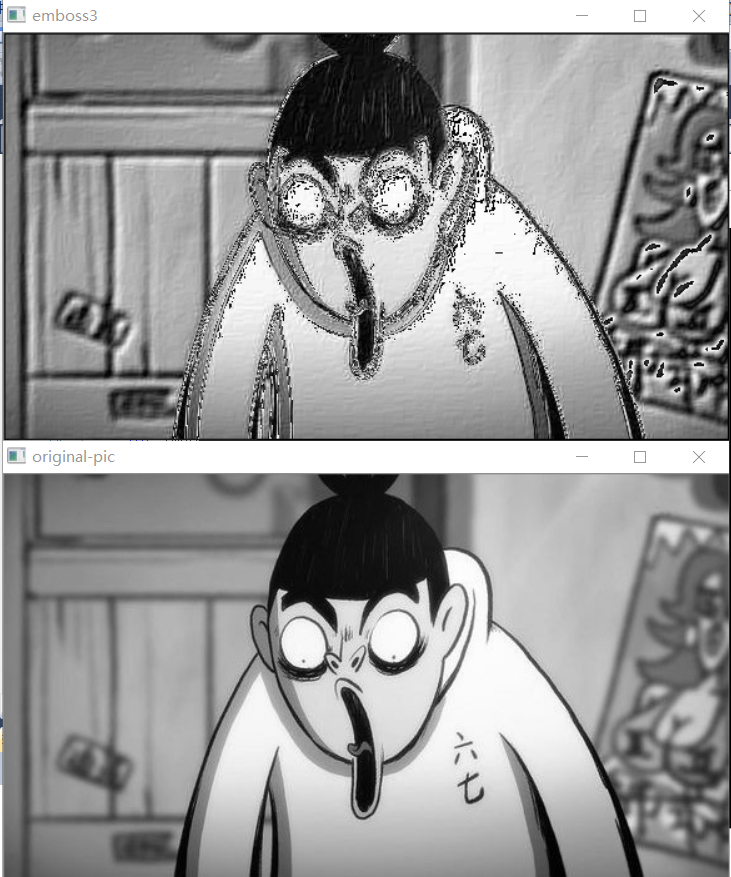
}效果如下

Q18:Emboss滤波
算子如下
代码如下
#include"opencv2/core/core.hpp"
#include"opencv2/highgui/highgui.hpp"
#include<opencv2/opencv.hpp>
#include "math.h"
#include"iostream"
using namespace std;
using namespace cv;
#define Kernel_size 3
Mat emboss3(Mat img){
//构建3*3滤波系数矩阵
double K[Kernel_size][Kernel_size] = {
{-2,-1,0},{-1,1,1},{0,1,2}};
int imgrow = img.rows;
int imgcol = img.cols;
Mat out = Mat::zeros(imgrow,imgcol,CV_8UC1);
int dot = floor((float)(Kernel_size/2));
int v;
for(int i=floor((float)(Kernel_size/2));i<imgrow-floor((float)(Kernel_size/2));i++){
for(int j=floor((float)(Kernel_size/2));j<imgcol-floor((float)(Kernel_size/2));j++){
v = 0;
for(int i_=-dot;i_<dot+1;i_++){
for(int j_=-dot;j_<dot+1;j_++){
v += img.at<uchar>(i+i_,j+j_)*K[i_+dot][j_+dot];
}
}
if(v>=0)
out.at<uchar>(i,j) = v;
else
out.at<uchar>(i,j) = -v;
}
}
return out;
}
void main(){
Mat img = imread("ck567.jpg",IMREAD_GRAYSCALE);
Mat out1 = emboss3(img);
imshow("emboss3",out1);
imshow("original-pic",img);
waitKey(0);
destroyAllWindows();
}效果如下
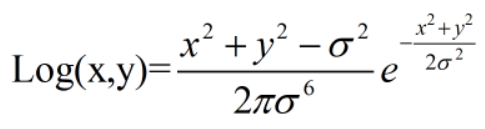
Q19:Log滤波
Log滤波又称为高斯-拉普拉斯滤波,先进行高斯平滑在进行拉氏滤波,其中高斯平滑的公式为log的定义式。
代码如下
#include"opencv2/core/core.hpp"
#include"opencv2/highgui/highgui.hpp"
#include<opencv2/opencv.hpp>
#include "math.h"
#include"iostream"
using namespace std;
using namespace cv;
#define M_PI 3.14159265358979323846
#define Kernel_size 5
#define sigma 3
Mat Log_filter(Mat img){
//构建3*3滤波系数矩阵
double K[Kernel_size][Kernel_size];
int imgrow = img.rows;
int imgcol = img.cols;
Mat out = Mat::zeros(imgrow,imgcol,CV_8UC1);
int dot = floor((float)(Kernel_size/2));
double Sum = 0;
int x = 0;
int y = 0;
for(int i=0;i<Kernel_size;i++){
for(int j=0;j<Kernel_size;j++){
x = j-dot;
y = i-dot;
K[i][j] = (x*x+y*y-sigma*sigma)/(2*M_PI*pow((double)sigma,6))*exp((-(x*x+y*y)/(2*sigma*sigma))*1.0);
Sum += K[i][j];
}
}
for(int i=0;i<Kernel_size;i++){
for(int j=0;j<Kernel_size;j++){
K[i][j] /= Sum;
}
}
int v;
for(int i=floor((float)(Kernel_size/2));i<imgrow-floor((float)(Kernel_size/2));i++){
for(int j=floor((float)(Kernel_size/2));j<imgcol-floor((float)(Kernel_size/2));j++){
v = 0;
for(int i_=-dot;i_<dot+1;i_++){
for(int j_=-dot;j_<dot+1;j_++){
v += img.at<uchar>(i+i_,j+j_)*K[i_+dot][j_+dot];
}
}
if(v>=0)
out.at<uchar>(i,j) = v;
else
out.at<uchar>(i,j) = -v;
}
}
return out;
}
void main(){
Mat img = imread("ck567.jpg",IMREAD_GRAYSCALE);
Mat out1 = Log_filter(img);
imshow("Log_filter",out1);
imshow("original-pic",img);
waitKey(0);
destroyAllWindows();
}效果如下
