贴一下汇总贴:论文阅读记录
一、摘要
本文提出了一种基于卷积神经网络(CNN)的方法,将流量作为图像进行学习,并以较高的精度预测大规模、全网络的流量速度。通过二维时空矩阵将时空交通动态转化为描述交通流时空关系的图像。将CNN应用到图像中,进行两个连续的步骤:交通特征提取和全网络交通速度预测。评估了该方法的有效性通过两个真实的交通网络,北京二环路和东北交通网络为例。通过与四个主流算法,即普通最小二乘OLS、k近邻KNN、人工神经网络ANN和随机森林RW。和三个深度学习架构,即堆叠式自动编码器SAE、递归神经网络RNN和长短时记忆网络LSTM进行比较。结果表明,该方法在可接受的执行时间内平均提高了42.91%的准确率。CNN可以在合理的时间内对模型进行训练,因此适用于大规模的交通网络。
文章主要内容
提出一种基于CNN的交通预测方法,将交通网络作为图像进行学习,并对交通速度进行预测。先是提取交通特征,然后进行交通预测。通过与四种算法和三种深度学习架构的对比,来展示该方法的高精度。
二、结论
- 深度学习方法在关于交通网络中道路路段的时空关系的研究还非常有限。
- CNN在计算机视觉方面取得了显著的成功,在图像学习任务上表现良好。
- 结果表明,该方法优于OLS、KNN、ANN、RF、SAE、RNN和LSTM神经网络,平均准确率提高42.91%。
可能的方向:
- CNN可以首先从交通网络中提取出抽象的交通特征。将特征向量输入到LSTM神经网络模型中,提高预测精度。
三、理论部分
本文使用的是出租车轨迹数据,利用轨迹数据获取某个路段某个时间段(本文2分钟)的平均交通速度,并整理成如下 M M M矩阵形式。
N N N为时间间隔的长度, Q Q Q为路段的长度,像素 m i j m_{ij} mij是第 i i i路段在 j j j时刻的平均交通速度。设 x x x轴和 y y y轴分别表示矩阵的时间和空间。生成的矩阵可以看作是图像的一个通道channel,因此,图像的宽度为 M M M像素,高度为 N N N像素。
交通矩阵提取示意图如下:

CNN用作图片识别和交通预测的区别:
首先,模型输入是不同的,即,输入图像只有一个通道值,该通道值由交通网络中所有道路的交通速度决定,图像像素值范围为0到网络的最大交通速度或速度上限。而在图像分类问题中,输入图像一般有三个通道,即RGB和像素值的范围从0到255。虽然存在差异,为了防止模型权重增加模型训练难度,要对模型输入进行了规范化。
其次,模型输出是不同的。在交通环境下,模型输出是预测交通网络各路段的交通速度,而在图像分类问题中,模型输出是图像类标签。
第三,抽象特征有不同的含义。在交通背景下,卷积层和池化层提取的抽象特征是路段之间关于交通速度的关系。在图像分类问题中,根据训练目标,抽象特征可以是图像的浅层边缘和某些对象的深层形状。
第四,目标函数因模型输出的不同而不同。在交通方面,由于输出是连续的交通速度,因此应该采用连续的目标函数(MSE)。在图像分类问题中,通常使用交叉熵代价函数cross entropy。
文章的网络架构如下:


四、案例简介
本文的输入为:
N N N为时间间隔的长度, Q Q Q为路段的长度,像素 m i j m_{ij} mij是第i路段在j时刻的平均交通速度。设 x x x轴和 y y y轴分别表示矩阵的时间和空间。生成的矩阵可以看作是图像的一个通道channel,因此,图像的宽度为 M M M像素,高度为 N N N像素。
实验数据:北京市2015年5月1号到6月6号出租车GPS数据,定位间隔约为1分钟,利用该轨迹数据获取某个路段某个时间段(本文2分钟)的平均交通速度得到上述矩阵。
本文选取了两个交通网络,一个是二环路(单向,236个路段),一个是东北部的一个子网络(部分双向,352个路段)。进行了4次实验,task1-task4。
Task 1: 使用过去30分钟的交通速度预测未来10分钟的;
Task 2: 使用过去40分钟的交通速度预测未来10分钟的;
Task 3: 使用过去30分钟的交通速度预测未来20分钟的;
Task 4: 使用过去40分钟的交通速度预测未来10分钟的。

为了获取交通速度矩阵,第一个网络直接拉直即可,第二个是把网络切割成一段一段的交通直线然后按顺序放置。
一天的数据处理成一张图片后共37张图片,如下图,横轴为时间,纵轴为各个路段。越红代表速度越低越拥挤。

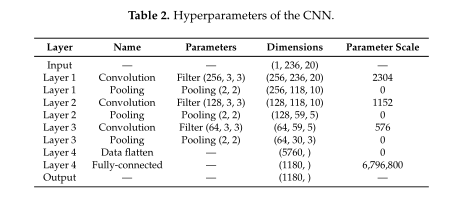
CNN参数:
Filter size=(3, 3), Pooling size=(2, 2), filter 分别为256,128,64个; 训练集为前30天的21600个样本(2分钟一个样本,一个小时30个,一天2430=720个,30天72030=21600个),测试集为后7天5040个样本。
预测结果:

- CNN不同于普通的全连接层,由于滤波器filter的存在,CNN能够提取局部特征。文章使用了数百个filter,一个filter可以能够提取1个交通特征,因此,对一个输入层,数百个filter就可以提取数百个交通特征。
- 池化层的设计目的是缩小采样和聚合数据,因为它们只从特定区域提取显著的数字。池化层保证CNN是局部不变的,这意味着不论是否进行特征移动、旋转或缩放CNN总是可以从输入中提取相同的特征。