说在前面的话:如果所有的边权都不相等,那么求得的最小生成树是唯一的。
难度: 无向图求最小生成树 << 有向图求最小生成树
最小生成树是对于无向图来说的,有向图的所有顶点最短连接叫做最小树形图。难度增加在:1)消除回路(不仅是多顶点回路,双顶点回路也要考虑)。2)边的方向要一致(不能让某个顶点既有出边又有入边)。
生长法(Kruskal algorithm)
生长法(克鲁斯卡尔算法)是一步步地将森林中的树进行合并。
之所以叫他生长法,是因为它算法思想包含一个从小到大的过程。首先按照边的权值进行从小到大排序,然后从小到大开始选边,注意不能构成回路,逐个判断后加入到生成树中,直到加入了n-1条边为止。
测试程序:
#include<stdio.h>
#include<string.h>
#include<iostream>
#include<algorithm>
using namespace std;
struct node
{
int x;
int y;
int z;
}nd[100];
bool cmp(struct node a,struct node b)
{
return a.z<b.z;
}
int f[100];
int get(int x)
{
if(f[x]==x)
return x;
else
{
f[x]=get(f[x]);
return f[x];
}
}
int main()
{
int n,m;
scanf("%d %d",&n,&m);
for(int i=1;i<=m;i++)
{
scanf("%d %d %d",&nd[i].x,&nd[i].y,&nd[i].z);
}
for(int i=1;i<=n;i++)
f[i]=i;
sort(nd+1,nd+m+1,cmp);
int sum=0;
for(int i=1;i<=m;i++)
{
if(get(nd[i].x)!=get(nd[i].y))
{
cout<<nd[i].x<<" "<<nd[i].y<<" "<<nd[i].z<<endl;
f[get(nd[i].y)]=get(nd[i].x);
sum+=nd[i].z;
cout<<sum<<endl;
if(i==n-1)
break;
}
}
cout<<sum<<endl;
}
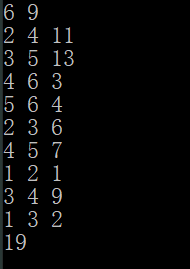
测试结果:

M: 边数 N:元素个数
时间复杂度: sort 构建最小生成树需要
所以时间复杂度为:
,因为M>>N,所以一般为
。
因为和边有关,所以适用求边比较少的网(稀疏图)的最小生成树。
近水楼台先得月法(Prim)
近水楼台先得月法是通过每次增加一条边来建立一棵树。
算法思想:因为最后求得的最小生成树肯定囊括了所有的顶点。所以可以选任意一个顶点作为开始,逐渐壮大最小生成树。依次找到距离最小生成树最近的非树顶点,加入到树中,直到最小生成树建立好。
邻接矩阵好操作一些,不过时间复杂度比较高 。这个和求单源最短路的边松弛法比较像,不过源点不是一个,生成树中所有的点都是源点。
测试程序:
#include<stdio.h>
#include<string.h>
#include<iostream>
using namespace std;
int map[100][100];
int dis[100];
int book[100];
int main()
{
int n,m;
scanf("%d %d",&n,&m);
for(int i=1; i<=n; i++)
{
for(int j=1; j<=n; j++)
{
if(i==j)
map[i][j]=0;
else
map[i][j]=99999999;
}
}
for(int i=1; i<=n; i++)
{
if(i==1)
dis[i]=0;
else
dis[i]=99999999;
}
for(int i=1; i<=m; i++)
{
int a,b,c;
scanf("%d %d %d",&a,&b,&c);
map[a][b]=c;
map[b][a]=c;
}
int minn=99999999;
int sum=0;
int j;
book[1]=1;
for(int i=1; i<=n; i++)
{
if(map[1][i]<dis[i])
dis[i]=map[1][i];
}
for(int i=1; i<=n-1; i++)
{
minn=99999999;
for(int i=1; i<=n; i++)
{
if(dis[i]<minn&&book[i]==0)
{
minn=dis[i];
j=i;
}
}
book[j]=1;
sum+=minn;
for(int i=1; i<=n; i++)
{
if(book[i]==0)
{
if(map[j][i]<dis[i])
dis[i]=map[j][i];
}
}
}
cout<<sum<<endl;
}测试结果:
如果除去无向图的性质,将边改为有向图(即2 4 认为2->4 4->2 认为不可达),结果为:

如果双向均认为可达,结果为:

差别在于最小生成树选择可达5号端点的路径由 4-5 7 这个改为了 5-6 4 ,结果由22->19。
所以无向图求最小生成树的时候一定要记得是双向可达的。
算法之所以优秀,是因为可以优化,不优化的程序实际上没有参考的意义。
如果借助堆,每次选边时间复杂度为 ,使用邻接表来存储图的话,整个算法的时间复杂度会降低到
测试程序:
#include<stdio.h>
#include<string.h>
#include<iostream>
using namespace std;
int n,m,size;
int u[100],v[100],w[100];
int first[100],next[100];
int dis[100];
int sum;
int book[100];
int stack_num[100];
int stack_pos[100];
void sift_up(int i)
{
if(i/2>=1)
{
if(dis[stack_num[i]]<dis[stack_num[i/2]])
{
swap(stack_num[i],stack_num[i/2]);
swap(stack_pos[stack_num[i]],stack_pos[stack_num[i/2]]);
i=i/2;
}
else
return;
}
}
void sift_down(int i)
{
int t=i;
int t1=i;
while(t*2<=size)
{
if(t*2<=size)
{
if(dis[stack_num[t]]>dis[stack_num[t*2]])
t1=t*2;
}
if(t*2+1<=size)
{
if(dis[stack_num[t1]]>dis[stack_num[t*2+1]])
t1=t*2+1;
}
if(t1==t)
break;
else
{
swap(stack_num[t],stack_num[t1]);
swap(stack_pos[stack_num[t]],stack_pos[stack_num[t1]]);
t=t1;
}
}
}
int pop()
{
int i=stack_num[1];
stack_num[1]=stack_num[size];
size--;
stack_pos[stack_num[1]]=1;
sift_down(stack_pos[stack_num[1]]);
cout<<"i="<<i<<endl;
return i;
}
int main()
{
scanf("%d %d",&n,&m);
for(int i=1; i<=2*m; i++)
{
first[i]=-1;
next[i]=-1;
}
for(int i=1; i<=m; i++)
{
scanf("%d %d %d",&u[i],&v[i],&w[i]);
u[i+m]=v[i];
v[i+m]=u[i];
w[i+m]=w[i];
}
for(int i=1; i<=2*m; i++)
{
if(first[u[i]]==-1)
first[u[i]]=i;
else
{
next[i]=first[u[i]];
first[u[i]]=i;
}
}
for(int i=1; i<=n; i++)
dis[i]=99999999;
dis[1]=0;
book[1]=1;
int t;
t=first[1];
while(t!=-1)
{
if(book[t]==0)
{
dis[v[t]]=w[t];
}
t=next[t];
}
for(int i=1; i<=n; i++)
{
stack_num[i]=i;
stack_pos[i]=i;
}
int j;
size=n;
for(int i=n/2; i>=1; i--)
{
sift_down(i);
}
pop();
int count=1;
while(count<=n-1)
{
int j=pop();
book[j]=1;
count++;
sum+=dis[j];
cout<<"sum="<<sum<<endl;
int t=first[j];
while(t!=-1)
{
if(book[v[t]]==0)
{
if(dis[v[t]]>w[t])
{
dis[v[t]]=w[t];
sift_up(stack_pos[v[t]]);
}
}
t=next[t];
}
}
cout<<"sum="<<sum<<endl;
}测试结果:

思路:

时间复杂度严格来说应该是: < 很显然,它适合稀疏图。 M越接近N,这个算法越不划算。
将邻接表存储边和堆排序选边结合起来的算法耗时如下:

使用邻接矩阵的程序耗时如下:

所以综上可以看出,使用邻接矩阵耗时更少一些,所以算法的优劣是看所处的环境是否有利于自己。不能简单的说这个好,那个不好。