2019.12.30挂到arxiv上
三星,约翰霍普金斯大学和南方科大出品
本文提出了一种使用Hotspot的方法来检测3D Object,在回归3D Object的参数时,使用了Anchor Free的方法。
HotSpot Network
HotSpot
先来介绍一下什么叫HotSpot:把场景首先用Voxel表示,那些属于前景的Voxel就是HotSpot。然后使用每个HotSpot预测一个box,使用NMS除去重复的预测。所以,看出HotSpot Network与PointRCNN中的RPN的联系之处了吗?HotSpot Network将场景体素化,如果将体素化之后的场景认为是将不规律的点云转换成一种规律的点云(将体素的中心看作为点,这个在PartA 2 ^2 2-Net中也有提到),那么HotSpot Network其实就是在使用规律点云中的每个点预测一个box,这就是与PointRCNN的RPN是一样的。
Network
在介绍了什么是HotSpot之后,在比较了HotSpot Network和PointRCNN中的RPN之后,就很容易理解HotSpot Network的网络结构了:
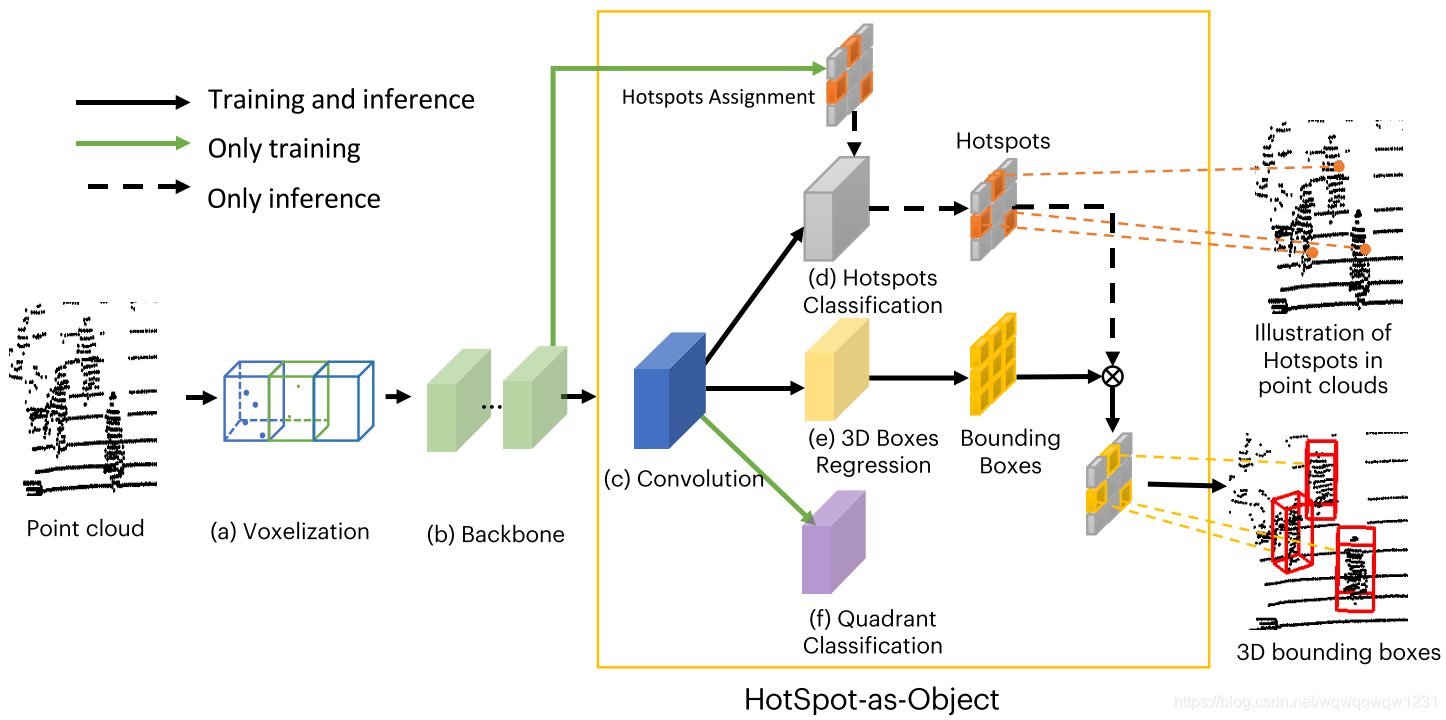
先不看(f),看上面两个分支,就很容易理解其与PointRCNN的RPN的关系了。
Anchor Free
如果对2D Anchor Free的方法有了解的话,可以看出,这个Anchor Free的操作也是非常的常规的,使用feature map中一个cell(文中叫neuron)的特征预测box,box的长宽高、位置和角度。
Quadrant Classification
这一部分只存在训练中,是为了让网络学到HotSpot与Object的关系的,相当于加了另外一部分的监督。这个其实在这个在PartA 2 ^2 2-Net中也有同样的思想,只不过PartA 2 ^2 2-Net是使用了这个相对关系作为特征的一部分,而本文中只是做为另外一个监督源,来训练主干网络的。
Experiments
效果还挺好,超过了PointRCNN。
Ablation Studies:
- 验证了Quadrant Classification的监督的有效性:还对比了使用二分区域,使用八分区域关系等监督,结果证明了4分区域最好。
- soft argmin:这个就是PointRCNN中用的bin-loss