1、前言:
在做实验时认定箱子是障碍物,如何在机器人工作环境中将其分割并检测出来是很重要的-以便得到其空间信息为路径规划提供依据。
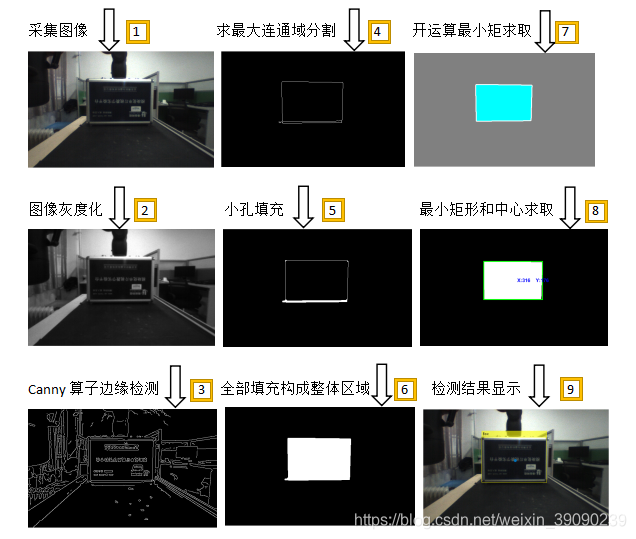
2、算法流程:
3、主要代码函数:
参考https://www.mathworks.com/help/images/identifying-round-objects.html
https://blog.csdn.net/weixin_39090239/article/details/81261259
4、实现效果:订阅Baxter右臂相机采集环境图像,并检测到箱子。