旋转链表的思路探讨与源码
旋转链表的题目如下图,该题属于链表类型的题目,主要考察对于链表本身的理解和循环遍历链表技巧的优化使用。本文的题目作者想到2种方法,分别是闭环方法和快慢指针方法,其中闭环方法使用Java进行编写,而快慢指针方法使用Python进行编写,当然这可能不是最优的解法,还希望各位大佬给出更快的算法。
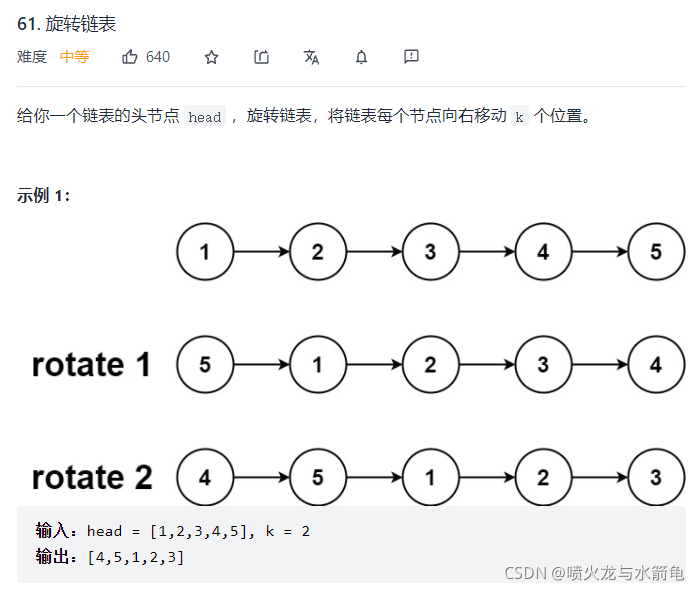
本人认为该题目可以使用链表闭环的方法,首先判断链表是否为空或者是否只有一个元素,如果是就直接返回链表。然后进行参数初始化赋值,并且循环遍历链表得到链表长度,并且对链表长度和旋转参数进行取余数处理,如果余数是0那么就直接返回链表本身。否则就把最后一个节点连到链表的头部,然后遍历并寻找旋转后的末尾节点,找到后断开连接,并且最终返回链表。那么按照这个思路我们的Java代码如下:
#喷火龙与水箭龟
class Solution {
public ListNode rotateRight(ListNode head, int k) {
if (head == null || head.next == null) {
return head;
}
ListNode endNode = head;
int num = 1;
while (endNode.next != null) {
num = num + 1;
endNode = endNode.next;
}
int rt = k % num;
if (rt == 0) {
return head;
}
endNode.next = head;
ListNode endNodeFake = head;
int diff = num - rt;
for (int jr = 1; jr < diff; jr++) {
endNodeFake = endNodeFake.next;
}
ListNode startNodeFake = endNodeFake.next;
endNodeFake.next = null;
return startNodeFake;
}
}

显然,我们看到闭环链表的方法效率不错,同时还可以使用快慢指针的方法进行处理,首先判断链表的长度,如果是0或者能被旋转次数整除就直接返回链表本身。然后进行参数初始化处理,将快慢指针都指向开始的链表头,让快指针先走旋转次数与链表长度取余数的步数,然后快慢指针开始一起遍历,直到快指针走到链表的尾部,这个时候的慢指针的所在位置就是尾部位置,然后进行链表的参数赋值即可,最终返回链表结果。所以按照这个思路就可以解决,下面是Python代码部分:
#喷火龙与水箭龟
class Solution:
def rotateRight(self, head: ListNode, k: int) -> ListNode:
test = head
num = 0
while test:
num = num + 1
test = test.next
if num == 0 or (k % num) == 0:
return head
a = head
b = head
yu = k % num
for jr in range(yu):
a = a.next
while a.next:
a = a.next
b = b.next
a.next = head
head = b.next
b.next = None
return head
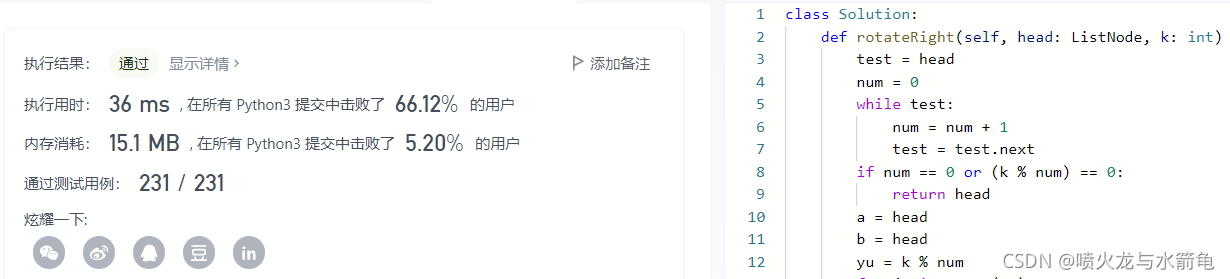
从结果来说Java版本的闭环链表方法的效率不错,而Python版本的快慢指针方法的速度一般,但应该是有更多的方法可以进一步提速的,希望朋友们能够多多指教,非常感谢。