1、内容简介
略
295-可以交流、咨询、答疑
2、内容说明
略
假设:(1)钢丝绳长度变化忽略不计,且不考虑其柔性;(2)假设台车和吊物均为质点;(3)各个传动机构间的摩擦忽略不计;(4)钢丝绳质量相对于吊物忽略不计;(5)吊物摆动阻尼系数忽略不计。设台车质量为M,吊物质量为m。建立三维桥式起重机系统模型的坐标系如图2.2所示。
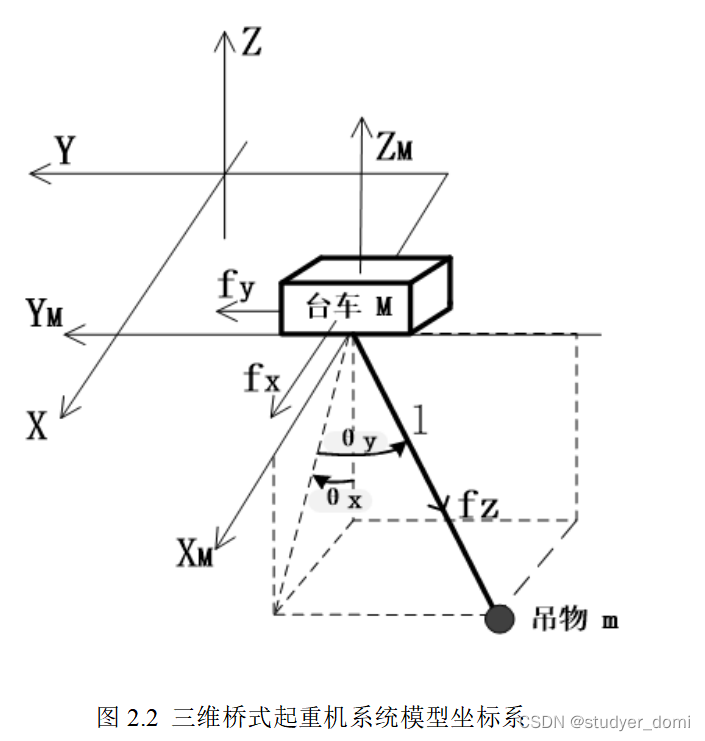
图2.2 三维桥式起重机系统模型坐标系
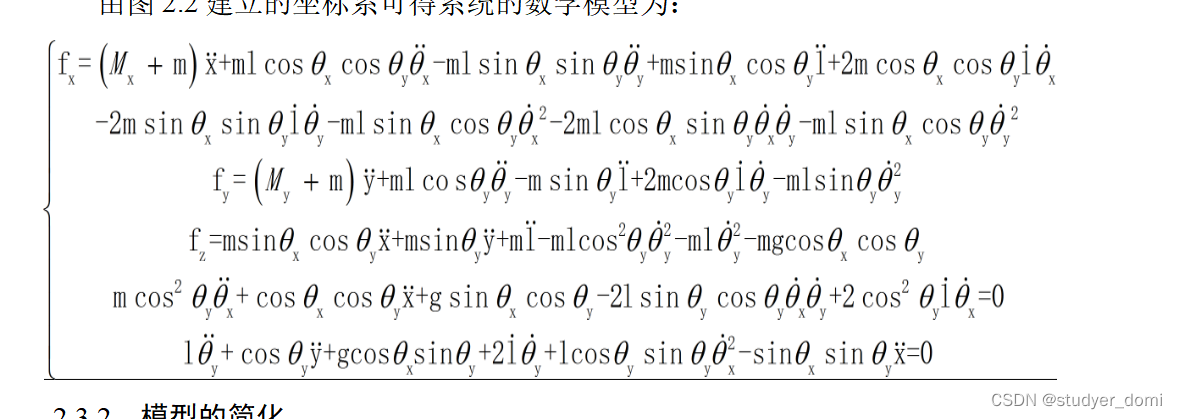
由图2.2建立的坐标系可得系统的数学模型为: 2.3.2 模型的简化
在桥式起重机实际工作过程中,要考虑吊物运输的安全性并尽可能抑制吊物的摆动,使摆角θ尽可能小,即|θx|<<1,|θy|<<1,|θ’x|<<1,|θ’y|<<1。另外,本章要研究的内容是吊物摆动的规律及其摆角的影响因素,所以,有必要对上述高度非线性系统模型进行如下的线性简化。
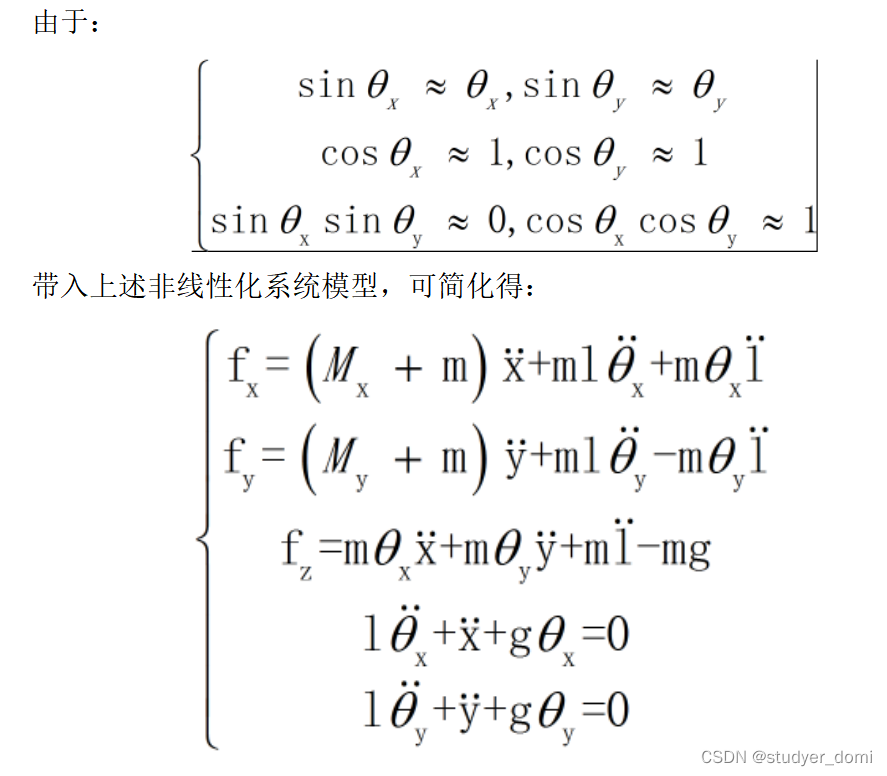
带入上述非线性化系统模型,可简化得:
(注意:坐标不同,fy与文献模型符号不同!)
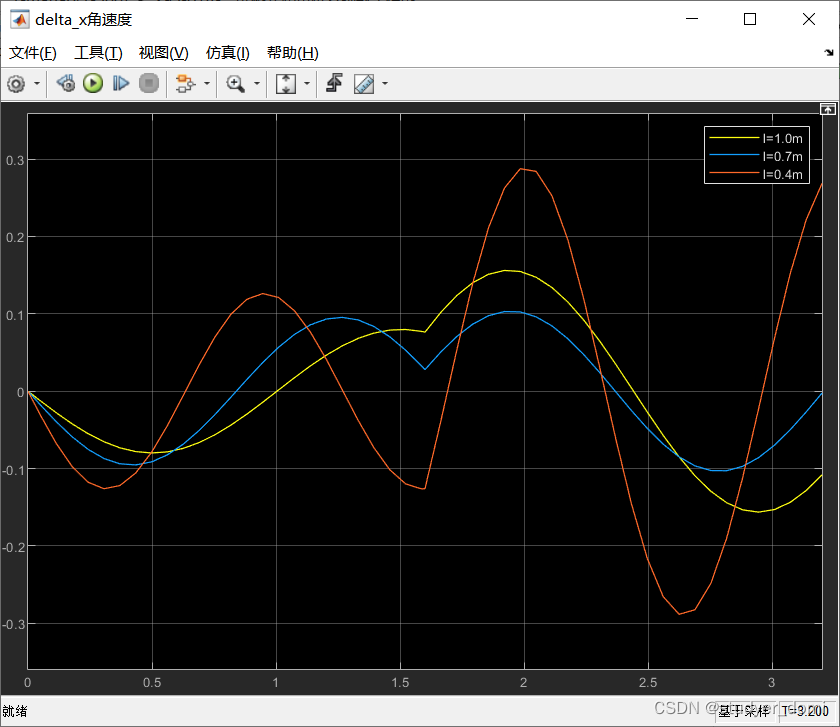
上式表明,吊物的二自由度摆角θx和θy主要受吊绳长度和大、小车在xoy平面运行加速度和的影响。
3、仿真分析
clc
close all
clear
fx = 6;
fy = 12;
fz = 6;
M = 10;
g = 9.8;
m = 1;
l1 = 1;l2 = 0.7;l3 = 0.4;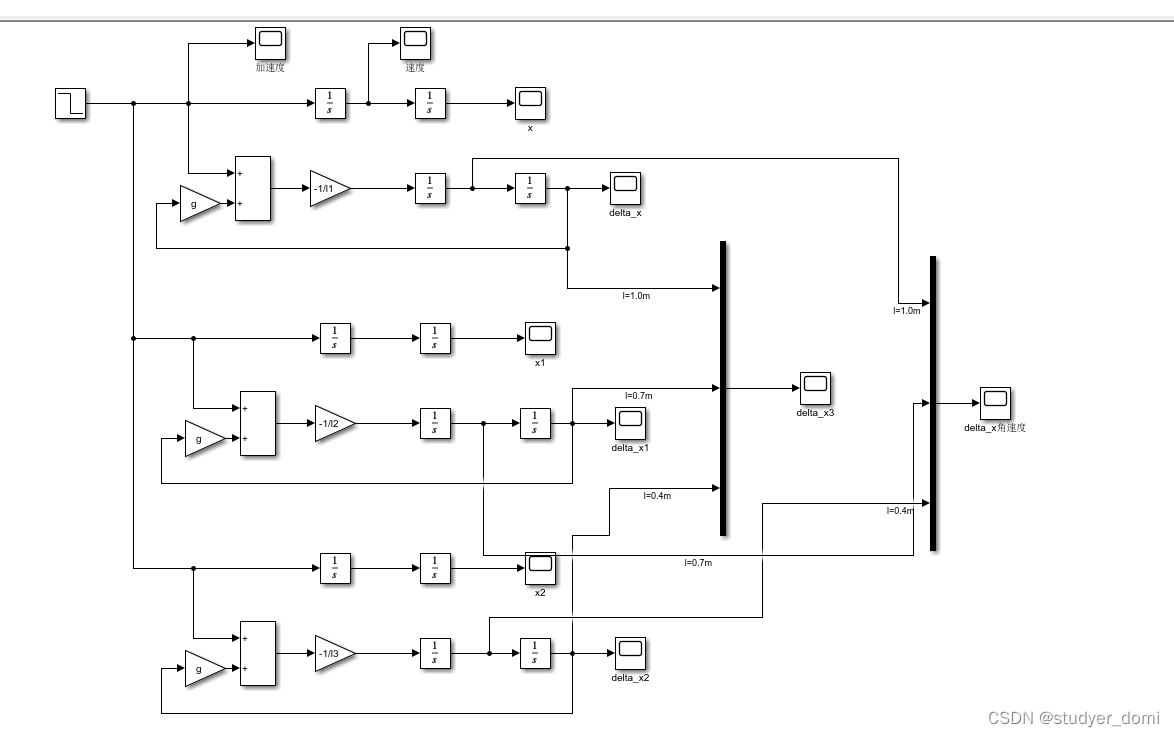
4、参考论文
基于吊重防摇控制的起重机快速对位关键技术研究