1、内容简介
汽车带可变阻尼的半主动悬架系统模型
308-可以交流、咨询、答疑
2、内容说明
- 被动悬架的系统模型
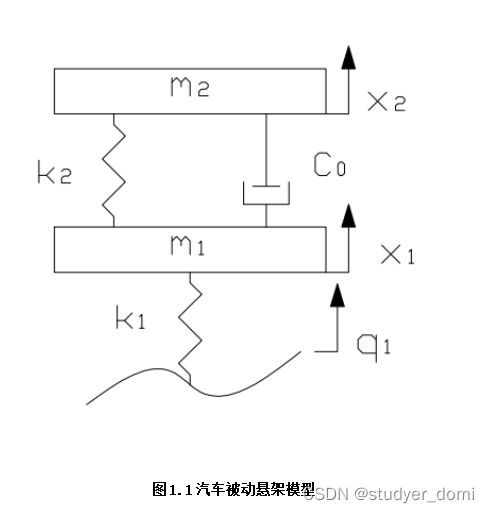
图1.1汽车被动悬架模型
根据牛顿第二运动定律可得到被动悬架系统度的车辆动力学模型的运动微分方程如下:

其中:是车身质量
是轮胎质量;
是轮胎刚度;
是悬架减震弹簧的刚度;
是阻尼系数;
是非簧载质量的垂直位移;
是簧载质量的垂直位移;
是路面垂直位移。
- 半主动悬架系统的模型
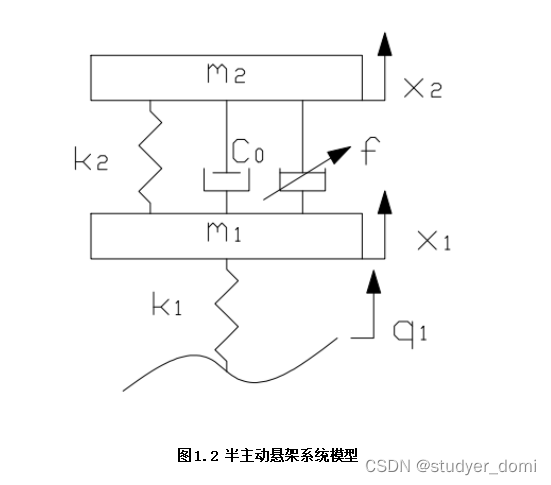
图1.2 半主动悬架系统模型
从以上两个模型来看,半主动悬架的模型和被动悬架的模型基本上是相同的,区别就是半主动悬架的阻尼是可调的,因此两种模型的微分方程是一样的,不同的只是被动悬架中阻尼值是常量,在半主动悬架中阻尼值是变量,在半主动悬架系统中其阻尼值包括和两部分为基值阻尼,为可调阻尼)。
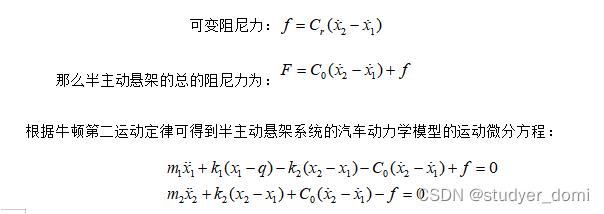
可变阻尼力:
那么半主动悬架的总的阻尼力为:
根据牛顿第二运动定律可得到半主动悬架系统的汽车动力学模型的运动微分方程:
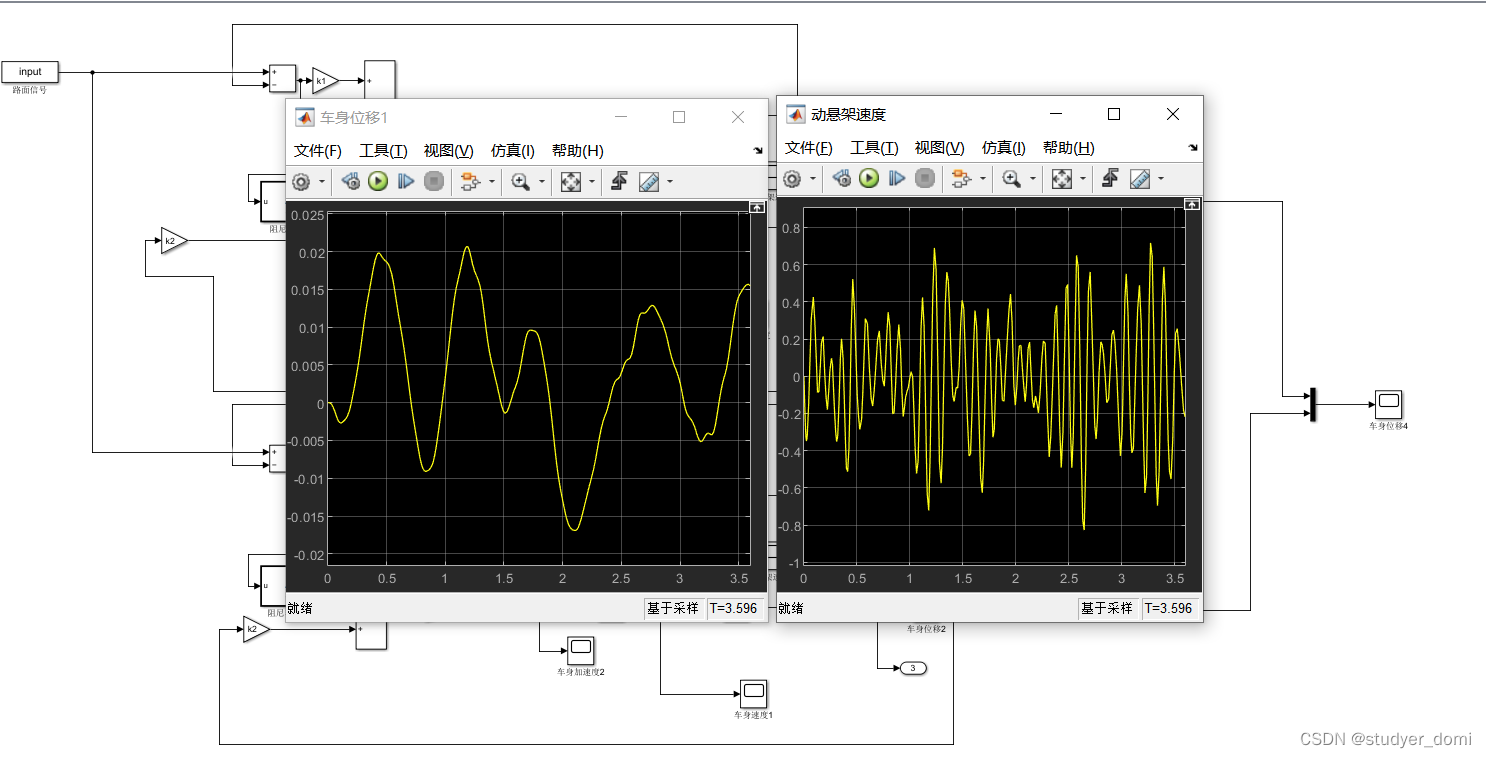
3、仿真分析
4、参考论文
半主动空气悬架系统的模糊控制_刘晓辉.pdf
基于模糊控制的汽车悬架系统性能研究_付登宏.pdf
基于自适应模糊控制的汽车悬架的仿真分析_孙新城.pdf
汽车主动悬架控制系统的发展研究_刘栋.pdf
空气悬架系统的模糊控制与仿真_陈龙.pdf
车辆半主动悬架的控制策略及仿真_林弋辉.pdf
车辆半主动悬架的模糊控制与仿真_刘波.pdf