1.软件版本
matlab2021a
2.系统概述
1.环境地图中的障碍物为静态、未知障碍物,可以随机设置。(一般设置5~7个,为计算简便设置成规则性状的障碍物)
2.机器人的行进方向为X轴的正方向,X轴逆时针旋转90°即为Y轴。两驱动轮之间的距离为50cm,驱动轮的直径为30cm。机器人的最大运动速度设为0.8m/s
3.为简化计算,在机器人的正前方及沿顺、逆时针各偏转45°的方位布置传感器。
机器人模型如图所示
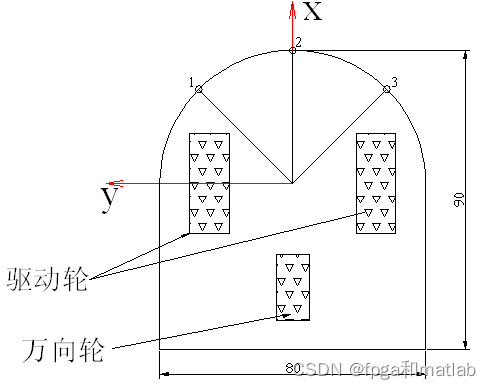
4.控制系统的输入为机器人正前方障碍物的距离df
matlab2021a
1.环境地图中的障碍物为静态、未知障碍物,可以随机设置。(一般设置5~7个,为计算简便设置成规则性状的障碍物)
2.机器人的行进方向为X轴的正方向,X轴逆时针旋转90°即为Y轴。两驱动轮之间的距离为50cm,驱动轮的直径为30cm。机器人的最大运动速度设为0.8m/s
3.为简化计算,在机器人的正前方及沿顺、逆时针各偏转45°的方位布置传感器。
机器人模型如图所示
4.控制系统的输入为机器人正前方障碍物的距离df