一、环境配置:win10系统
cuda10.1+cudnn7.5+Python3.6.5+pytorch1.5.0+libtorch1.5.0+VS2017
或者libtorch1.4.0+VS2015
软件下载和配置过程在此不赘述。
classification
pytorch训练得到的pth文件转libtorch使用的pt文件脚本(以分10类,gpu版本为例):
torchscript.py
import torch
import pointnet_cls
model = pointnet_cls.get_model(10, False)
model = model.cuda() #cpu版本需注释此句
model.eval()
model.load_state_dict(torch.load('best_model.pth'))
example=torch.rand(1, 3, 1024)
example=example.cuda() #cpu版本需注释此句
traced_script_module = torch.jit.trace(model, example)
traced_script_module.save("best_model.pt")
C++部署代码:
#include <iostream>
#include <vector>
#include <fstream>
#include <torch/script.h>
void pc_normalize(std::vector<float>& points)
{
int N = points.size() / 3;
float mean_x = 0, mean_y = 0, mean_z = 0;
for (size_t i = 0; i < N; ++i)
{
mean_x += points[3 * i];
mean_y += points[3 * i + 1];
mean_z += points[3 * i + 2];
}
mean_x /= N;
mean_y /= N;
mean_z /= N;
for (size_t i = 0; i < N; ++i)
{
points[3 * i] -= mean_x;
points[3 * i + 1] -= mean_y;
points[3 * i + 2] -= mean_z;
}
float m = 0;
for (size_t i = 0; i < N; ++i)
{
if (sqrt(pow(points[3 * i], 2) + pow(points[3 * i + 1], 2) + pow(points[3 * i + 2], 2)) > m)
m = sqrt(pow(points[3 * i], 2) + pow(points[3 * i + 1], 2) + pow(points[3 * i + 2], 2));
}
for (size_t i = 0; i < N; ++i)
{
points[3 * i] /= m;
points[3 * i + 1] /= m;
points[3 * i + 2] /= m;
}
}
void classfier(std::vector<float>& points)
{
torch::Tensor points_tensor = torch::from_blob(points.data(), { 1, 1024, 3 }, torch::kFloat);
points_tensor = points_tensor.to(torch::kCUDA);
points_tensor = points_tensor.permute({ 0, 2, 1 });
//std::cout << points_tensor << std::endl;
torch::jit::script::Module module = torch::jit::load("classes10_gpu.pt");
module.to(torch::kCUDA);
auto outputs = module.forward({points_tensor}).toTuple();
torch::Tensor out0 = outputs->elements()[0].toTensor();
std::cout << out0 << std::endl;
auto max_result = out0.max(1, true);
auto max_index = std::get<1>(max_result).item<int>();
std::cout << max_index << std::endl;
}
int main()
{
std::vector<float> points;
std::ifstream infile;
float x, y, z, nx, ny, nz;
char ch;
infile.open("bed_0610.txt");
int point_num = 0;
while (infile >> x >> ch >> y >> ch >> z >> ch >> nx >> ch >> ny >> ch >> nz)
{
points.push_back(x);
points.push_back(y);
points.push_back(z);
++point_num;
if (point_num == 1024) break;
}
infile.close();
pc_normalize(points);
classfier(points);
system("pause");
return 0;
}
预测结果:
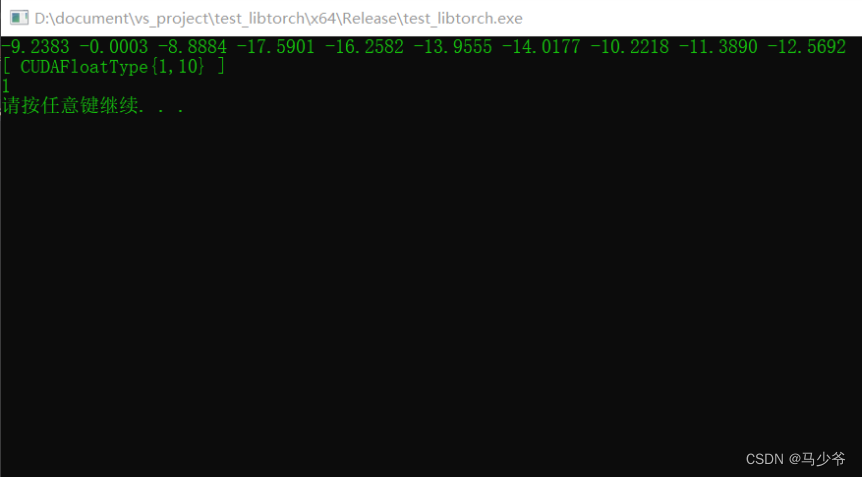
预测类别为1,在names.txt中对应为bed,结果正确。
C++推理速度稳定在不到0.2s,相比Python推理速度1~2s快了很多。
PartSegmentation
pytorch训练得到的pth文件转libtorch使用的pt文件脚本(以1类物体分成4部分,gpu版本为例):
torchscript.py
import torch
import pointnet_part_seg
def to_categorical(y, num_classes):
""" 1-hot encodes a tensor """
new_y = torch.eye(num_classes)[y.cpu().data.numpy(),]
if (y.is_cuda):
return new_y.cuda()
return new_y
model = pointnet_part_seg.get_model(4, False)
model = model.cuda() #cpu版本需注释此句
model.eval()
model.load_state_dict(torch.load('best_model.pth'))
example=torch.rand(1, 3, 2048)
example=example.cuda() #cpu版本需注释此句
label=torch.rand(1, 1)
label=label.cuda() #cpu版本需注释此句
traced_script_module = torch.jit.trace(model, (example, to_categorical(label, 1)))
traced_script_module.save("best_model.pt")
C++部署代码:
#include <iostream>
#include <vector>
#include <fstream>
#include <torch/script.h>
void pc_normalize(std::vector<float>& points)
{
int N = points.size() / 3;
float mean_x = 0, mean_y = 0, mean_z = 0;
for (size_t i = 0; i < N; ++i)
{
mean_x += points[3 * i];
mean_y += points[3 * i + 1];
mean_z += points[3 * i + 2];
}
mean_x /= N;
mean_y /= N;
mean_z /= N;
for (size_t i = 0; i < N; ++i)
{
points[3 * i] -= mean_x;
points[3 * i + 1] -= mean_y;
points[3 * i + 2] -= mean_z;
}
float m = 0;
for (size_t i = 0; i < N; ++i)
{
if (sqrt(pow(points[3 * i], 2) + pow(points[3 * i + 1], 2) + pow(points[3 * i + 2], 2)) > m)
m = sqrt(pow(points[3 * i], 2) + pow(points[3 * i + 1], 2) + pow(points[3 * i + 2], 2));
}
for (size_t i = 0; i < N; ++i)
{
points[3 * i] /= m;
points[3 * i + 1] /= m;
points[3 * i + 2] /= m;
}
}
void resample(std::vector<float>& points, int nums)
{
srand((int)time(0));
std::vector<int> choice(nums);
for (size_t i = 0; i < nums; i++)
{
choice[i] = rand() % (points.size() / 3);
}
std::vector<float> temp_points(3 * nums);
for (size_t i = 0; i < nums; i++)
{
temp_points[3 * i] = points[3 * choice[i]];
temp_points[3 * i + 1] = points[3 * choice[i] + 1];
temp_points[3 * i + 2] = points[3 * choice[i] + 2];
}
points = temp_points;
}
at::Tensor classfier(std::vector<float>& points, std::vector<float>& labels)
{
torch::Tensor points_tensor = torch::from_blob(points.data(), { 1, 2048, 3 }, torch::kFloat);
torch::Tensor labels_tensor = torch::from_blob(labels.data(), { 1, 1, 1}, torch::kFloat);
points_tensor = points_tensor.to(torch::kCUDA);
points_tensor = points_tensor.permute({ 0, 2, 1 });
//std::cout << points_tensor << std::endl;
labels_tensor = labels_tensor.to(torch::kCUDA);
//std::cout << labels_tensor << std::endl;
torch::jit::script::Module module = torch::jit::load("best_model.pt");
module.to(torch::kCUDA);
auto outputs = module.forward({ points_tensor, labels_tensor }).toTuple();
torch::Tensor out0 = outputs->elements()[0].toTensor();
//std::cout << out0 << std::endl; //[ CUDAFloatType{1,2048,4} ]
out0 = torch::squeeze(out0);
//std::cout << out0 << std::endl; //[ CUDAFloatType{2048,4} ]
auto max_classes = out0.max(1);
auto max_result = std::get<0>(max_classes);
auto max_index = std::get<1>(max_classes);
//std::cout << max_result << std::endl;
//std::cout << max_index << std::endl;
return max_index;
}
int main()
{
std::vector<float> points, labels;
float x, y, z, nx, ny, nz, label;
int point_num = 2048;
std::ifstream infile;
infile.open("85a15c26a6e9921ae008cc4902bfe3cd.txt");
while (infile >> x >> y >> z >> nx >> ny >> nz >>label)
{
points.push_back(x);
points.push_back(y);
points.push_back(z);
}
labels.push_back(1.0);
infile.close();
pc_normalize(points);
resample(points, point_num);
at::Tensor result = classfier(points, labels);
std::fstream outfile;
outfile.open("85a15+.txt", 'w');
for (size_t i = 0; i < point_num; i++)
{
outfile << points[3 * i] << " " << points[3 * i + 1] << " " << points[3 * i + 2] << " " << result[i].item<int>() << std::endl;
}
outfile.close();
system("pause");
return 0;
}
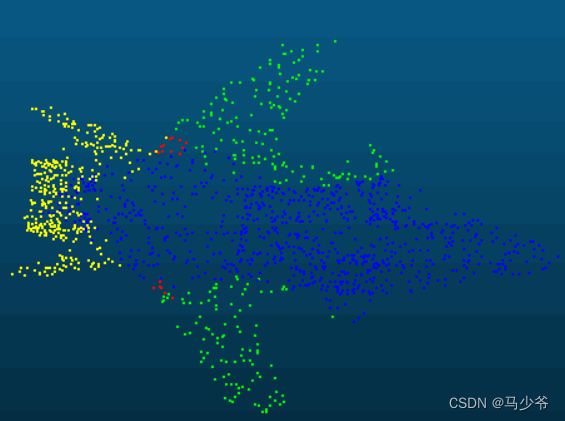
预测结果:
参考文献:
https://blog.csdn.net/taifyang/article/details/124257666
https://blog.csdn.net/taifyang/article/details/124332344