在kitti标注文件label_2中,三维目标标注的结果是包括中心坐标、尺寸和旋转角度等三个部分,其中中心坐标和旋转角度是在相机坐标系下的结果。因此,这两个结果需要利用到标定文件calib变换到雷达坐标系下。
Kitti坐标系如下图所示:

Mini Kitti数据介绍与下载请参考:https://blog.csdn.net/suiyingy/article/details/124820161。
下文中代码参考来源于:GitHub - skyhehe123/VoxelNet-pytorch。
1 获取标定信息
通过calib中的标定文件获取P2、R0和Tr_velo2cam。标定文件的详细介绍,请参考:https://blog.csdn.net/suiyingy/article/details/124787636。
2 kitti标注转三维目标检测框
Kitti标注文件详细介绍请参考:https://blog.csdn.net/suiyingy/article/details/124717070。
Kiti标注中三维目标的中心点定义成目标框底部平面的中心。中心坐标利用Tr_velo2cam的逆矩阵从相机坐标系(x,y,z)变换到雷达坐标系(tx, ty, tz)。根据标注信息,物体的高度、宽度、长度分别维d、w、l。那么,8个顶点坐标分别为(-l/2, w/2, 0)、(-l/2, -w/2, 0)、(l/2, -w/2, 0)、(l/2, w/2, 0)、(-l/2, w/2, h)、(-l/2, -w/2, h)、(l/2, -w/2, h)、(l/2, w/2, h)。这8个顶点分别对应下面示意图的0-7。如下图所示,在雷达坐标系中,x表示汽车前进方向,对应方向的尺寸为目标长度l;y表示车身方向,对应方向的尺寸为目标宽度w;z表示高度方向,对应方向的尺寸为目标高度h。以坐标系为视点,2、3、6、7构成的平面为目标自身的前方。

标签数据中的ry旋转角度需要转换为雷达坐标系绕z轴的旋转角度,角度大小是与车正前方的夹角,而ry是与车身方向上的夹角,ry+rz=-pi/2,这个负号与坐标系正方向定义相关。根据rz构建旋转矩阵,将旋转矩阵乘以检测框后加上中心坐标可以得到雷达坐标系中检测框的最终的8个顶点坐标。

3 python可视化代码
# -*- coding: utf-8 -*-
"""
乐乐感知学堂公众号
@author: https://blog.csdn.net/suiyingy
"""
from __future__ import division
import os
import numpy as np
import mayavi.mlab as mlab
#过滤指定范围之外的点和目标框
def get_filtered_lidar(lidar, boxes3d=None):
xrange = (0, 70.4)
yrange = (-40, 40)
zrange = (-3, 1)
pxs = lidar[:, 0]
pys = lidar[:, 1]
pzs = lidar[:, 2]
filter_x = np.where((pxs >= xrange[0]) & (pxs < xrange[1]))[0]
filter_y = np.where((pys >= yrange[0]) & (pys < yrange[1]))[0]
filter_z = np.where((pzs >= zrange[0]) & (pzs < zrange[1]))[0]
filter_xy = np.intersect1d(filter_x, filter_y)
filter_xyz = np.intersect1d(filter_xy, filter_z)
if boxes3d is not None:
box_x = (boxes3d[:, :, 0] >= xrange[0]) & (boxes3d[:, :, 0] < xrange[1])
box_y = (boxes3d[:, :, 1] >= yrange[0]) & (boxes3d[:, :, 1] < yrange[1])
box_z = (boxes3d[:, :, 2] >= zrange[0]) & (boxes3d[:, :, 2] < zrange[1])
box_xyz = np.sum(box_x & box_y & box_z,axis=1)
return lidar[filter_xyz], boxes3d[box_xyz>0]
return lidar[filter_xyz]
def draw_lidar(lidar, is_grid=False, is_axis = True, is_top_region=True, fig=None):
pxs=lidar[:,0]
pys=lidar[:,1]
pzs=lidar[:,2]
prs=lidar[:,3]
if fig is None: fig = mlab.figure(figure=None, bgcolor=(0,0,0), fgcolor=None, engine=None, size=(1000, 500))
mlab.points3d(
pxs, pys, pzs, prs,
mode='point', # 'point' 'sphere'
colormap='gnuplot', #'bone', #'spectral', #'copper',
scale_factor=1,
figure=fig)
#draw grid
if is_grid:
mlab.points3d(0, 0, 0, color=(1,1,1), mode='sphere', scale_factor=0.2)
for y in np.arange(-50,50,1):
x1,y1,z1 = -50, y, 0
x2,y2,z2 = 50, y, 0
mlab.plot3d([x1, x2], [y1, y2], [z1,z2], color=(0.5,0.5,0.5), tube_radius=None, line_width=1, figure=fig)
for x in np.arange(-50,50,1):
x1,y1,z1 = x,-50, 0
x2,y2,z2 = x, 50, 0
mlab.plot3d([x1, x2], [y1, y2], [z1,z2], color=(0.5,0.5,0.5), tube_radius=None, line_width=1, figure=fig)
#draw axis
if is_grid:
mlab.points3d(0, 0, 0, color=(1,1,1), mode='sphere', scale_factor=0.2)
axes=np.array([
[2.,0.,0.,0.],
[0.,2.,0.,0.],
[0.,0.,2.,0.],
],dtype=np.float64)
fov=np.array([ ##<todo> : now is 45 deg. use actual setting later ...
[20., 20., 0.,0.],
[20.,-20., 0.,0.],
],dtype=np.float64)
mlab.plot3d([0, axes[0,0]], [0, axes[0,1]], [0, axes[0,2]], color=(1,0,0), tube_radius=None, figure=fig)
mlab.plot3d([0, axes[1,0]], [0, axes[1,1]], [0, axes[1,2]], color=(0,1,0), tube_radius=None, figure=fig)
mlab.plot3d([0, axes[2,0]], [0, axes[2,1]], [0, axes[2,2]], color=(0,0,1), tube_radius=None, figure=fig)
mlab.plot3d([0, fov[0,0]], [0, fov[0,1]], [0, fov[0,2]], color=(1,1,1), tube_radius=None, line_width=1, figure=fig)
mlab.plot3d([0, fov[1,0]], [0, fov[1,1]], [0, fov[1,2]], color=(1,1,1), tube_radius=None, line_width=1, figure=fig)
#draw top_image feature area
if is_top_region:
#关注指定范围内的点云
x1 = 0
x2 = 70.4
y1 = -40
y2 = 40
mlab.plot3d([x1, x1], [y1, y2], [0,0], color=(0.5,0.5,0.5), tube_radius=None, line_width=1, figure=fig)
mlab.plot3d([x2, x2], [y1, y2], [0,0], color=(0.5,0.5,0.5), tube_radius=None, line_width=1, figure=fig)
mlab.plot3d([x1, x2], [y1, y1], [0,0], color=(0.5,0.5,0.5), tube_radius=None, line_width=1, figure=fig)
mlab.plot3d([x1, x2], [y2, y2], [0,0], color=(0.5,0.5,0.5), tube_radius=None, line_width=1, figure=fig)
mlab.orientation_axes()
mlab.view(azimuth=180,elevation=None,distance=50,focalpoint=[ 12.0909996 , -1.04700089, -2.03249991])#2.0909996 , -1.04700089, -2.03249991
return fig
def draw_gt_boxes3d(gt_boxes3d, fig, color=(1,0,0), line_width=2):
num = len(gt_boxes3d)
for n in range(num):
b = gt_boxes3d[n]
for k in range(0,4):
i,j=k,(k+1)%4
mlab.plot3d([b[i,0], b[j,0]], [b[i,1], b[j,1]], [b[i,2], b[j,2]], color=color, tube_radius=None, line_width=line_width, figure=fig)
i,j=k+4,(k+3)%4 + 4
mlab.plot3d([b[i,0], b[j,0]], [b[i,1], b[j,1]], [b[i,2], b[j,2]], color=color, tube_radius=None, line_width=line_width, figure=fig)
i,j=k,k+4
mlab.plot3d([b[i,0], b[j,0]], [b[i,1], b[j,1]], [b[i,2], b[j,2]], color=color, tube_radius=None, line_width=line_width, figure=fig)
mlab.view(azimuth=180,elevation=None,distance=50,focalpoint=[ 12.0909996 , -1.04700089, -2.03249991])#2.0909996 , -1.04700089, -2.03249991
def load_kitti_calib(calib_file):
"""
load projection matrix
"""
with open(calib_file) as fi:
lines = fi.readlines()
assert (len(lines) == 8)
obj = lines[0].strip().split(' ')[1:]
P0 = np.array(obj, dtype=np.float32)
obj = lines[1].strip().split(' ')[1:]
P1 = np.array(obj, dtype=np.float32)
obj = lines[2].strip().split(' ')[1:]
P2 = np.array(obj, dtype=np.float32)
obj = lines[3].strip().split(' ')[1:]
P3 = np.array(obj, dtype=np.float32)
obj = lines[4].strip().split(' ')[1:]
R0 = np.array(obj, dtype=np.float32)
obj = lines[5].strip().split(' ')[1:]
Tr_velo_to_cam = np.array(obj, dtype=np.float32)
obj = lines[6].strip().split(' ')[1:]
Tr_imu_to_velo = np.array(obj, dtype=np.float32)
return {'P2': P2.reshape(3, 4),
'R0': R0.reshape(3, 3),
'Tr_velo2cam': Tr_velo_to_cam.reshape(3, 4)}
def box3d_cam_to_velo(box3d, Tr):
def project_cam2velo(cam, Tr):
T = np.zeros([4, 4], dtype=np.float32)
T[:3, :] = Tr
T[3, 3] = 1
T_inv = np.linalg.inv(T)
lidar_loc_ = np.dot(T_inv, cam)
lidar_loc = lidar_loc_[:3]
return lidar_loc.reshape(1, 3)
def ry_to_rz(ry):
angle = -ry - np.pi / 2
if angle >= np.pi:
angle -= np.pi
if angle < -np.pi:
angle = 2*np.pi + angle
return angle
h,w,l,tx,ty,tz,ry = [float(i) for i in box3d]
cam = np.ones([4, 1])
cam[0] = tx
cam[1] = ty
cam[2] = tz
t_lidar = project_cam2velo(cam, Tr)
Box = np.array([[-l / 2, -l / 2, l / 2, l / 2, -l / 2, -l / 2, l / 2, l / 2],
[w / 2, -w / 2, -w / 2, w / 2, w / 2, -w / 2, -w / 2, w / 2],
[0, 0, 0, 0, h, h, h, h]])
rz = ry_to_rz(ry)
rotMat = np.array([
[np.cos(rz), -np.sin(rz), 0.0],
[np.sin(rz), np.cos(rz), 0.0],
[0.0, 0.0, 1.0]])
velo_box = np.dot(rotMat, Box)
cornerPosInVelo = velo_box + np.tile(t_lidar, (8, 1)).T
box3d_corner = cornerPosInVelo.transpose()
return box3d_corner.astype(np.float32)
def load_kitti_label(label_file, Tr):
with open(label_file,'r') as f:
lines = f.readlines()
gt_boxes3d_corner = []
num_obj = len(lines)
for j in range(num_obj):
obj = lines[j].strip().split(' ')
obj_class = obj[0].strip()
if obj_class not in ['Car']:
continue
box3d_corner = box3d_cam_to_velo(obj[8:], Tr)
gt_boxes3d_corner.append(box3d_corner)
gt_boxes3d_corner = np.array(gt_boxes3d_corner).reshape(-1,8,3)
return gt_boxes3d_corner
def test():
lidar_path = os.path.join('./data/KITTI/training', "velodyne/")
calib_path = os.path.join('./data/KITTI/training', "calib/")
label_path = os.path.join('./data/KITTI/training', "label_2/")
lidar_file = lidar_path + '/' + '000016' + '.bin'
calib_file = calib_path + '/' + '000016' + '.txt'
label_file = label_path + '/' + '000016' + '.txt'
#加载雷达数据
print("Processing: ", lidar_file)
lidar = np.fromfile(lidar_file, dtype=np.float32)
lidar = lidar.reshape((-1, 4))
#加载标注文件
calib = load_kitti_calib(calib_file)
#标注转三维目标检测框
gt_box3d = load_kitti_label(label_file, calib['Tr_velo2cam'])
#过滤指定范围之外的点和目标框
lidar, gt_box3d = get_filtered_lidar(lidar, gt_box3d)
# view in point cloud,可视化
fig = draw_lidar(lidar, is_grid=True, is_top_region=True)
draw_gt_boxes3d(gt_boxes3d=gt_box3d, fig=fig)
mlab.show()
if __name__ == '__main__':
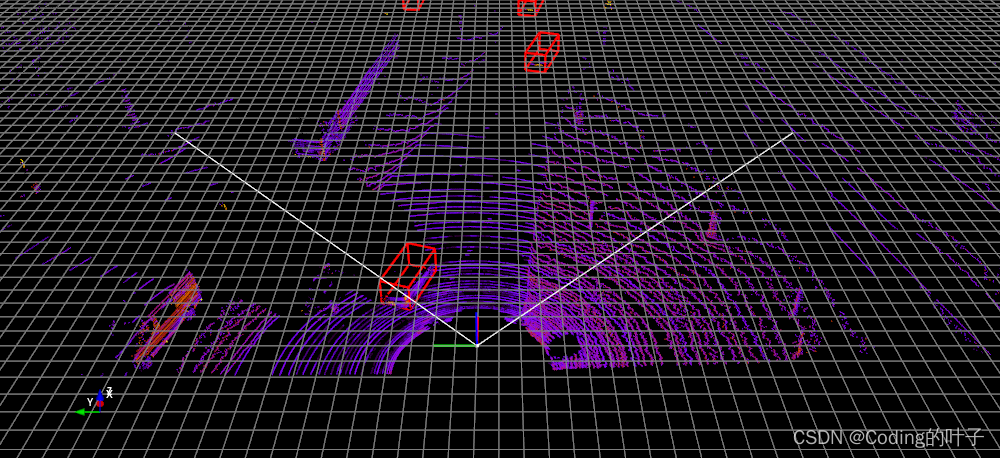
test()4 可视化效果
5 python三维点云从基础到深度学习_Coding的叶子的博客-CSDN博客_python三维点云重建
更多三维、二维感知算法和金融量化分析算法请关注“乐乐感知学堂”微信公众号,并将持续进行更新。