ref 测控电路第五版
电桥放大电路: 传感器电桥和运放组成的放大电路 / 传感器和运放构成的电桥
单端输入电桥放大电路
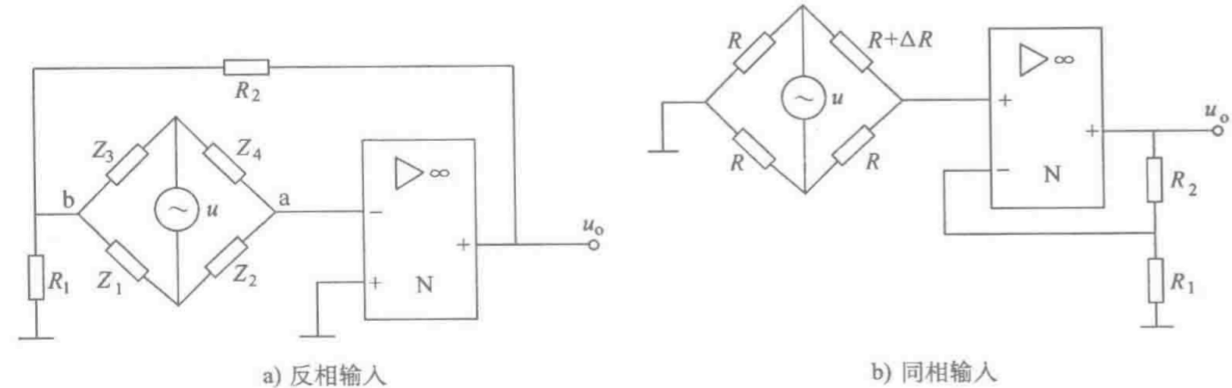
- 反相输入电桥放大电路
- u a b = ( Z 4 Z 2 + Z 4 − Z 3 Z 1 + Z 3 ) u u_{ab}=(\frac{Z_4}{Z_2+Z_4}-\frac{Z_3}{Z_1+Z_3})u uab=(Z2+Z4Z4−Z1+Z3Z3)u
- 电桥电源 u u u浮置, 在 R 1 R 2 R_1 R_2 R1R2无电流通过, a虚地, u o u_o uo反馈到 R 1 R_1 R1两端电压为 − u a b -u_{ab} −uab u o R 1 R 1 + R 2 = − u a b u_o\frac{R_1}{R_1+R_2}=-u_{ab} uoR1+R2R1=−uab
- 若 Z 1 = Z 2 = Z 4 = R , Z 3 = R ( 1 + δ ) Z_1=Z_2=Z_4=R, Z_3=R(1+\delta) Z1=Z2=Z4=R,Z3=R(1+δ) 相对变化率 δ \delta δ
- u o = ( 1 + R 2 R 1 ) u 4 δ 1 + δ / 2 u_o=(1+\frac{R_2}{R_1})\frac{u}{4}\frac{\delta}{1+\delta/2} uo=(1+R1R2)4u1+δ/2δ
- 同相输入电桥放大电路, 输出反向
- 增益与桥臂电阻无关, 增益稳定
- 电源电桥必须浮置, 输出 u o u_o uo与 δ \delta δ非线性, δ < < 1 \delta<<1 δ<<1时近似线性
差动输入电桥放大电路
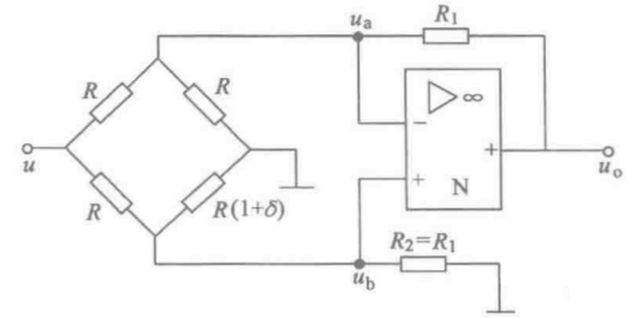
- R 1 = R 2 , R 2 > > R R_1=R_2, R_2>>R R1=R2,R2>>R
- u a = u o R R + 2 R 1 + u 2 u_a=u_o\frac{R}{R+2R_1}+\frac{u}{2} ua=uoR+2R1R+2u
- u b = u 1 + δ 2 + δ u_b=u\frac{1+\delta}{2+\delta} ub=u2+δ1+δ
- 运放理想工作状态, u a = u b u_a=u_b ua=ub
- u o = ( 1 + 2 R 1 R ) δ 1 + δ / 2 u 4 u_o=(1+\frac{2R_1}{R})\frac{\delta}{1+\delta/2}\frac{u}{4} uo=(1+R2R1)1+δ/2δ4u
- 四桥臂同时变化, 电压放大倍数非常量, 桥臂电阻 R R R温度系数不同于 R 1 R_1 R1, 增益不稳定
- 只适用于低阻值传感器, 测量精度要求不高场合
线性电桥
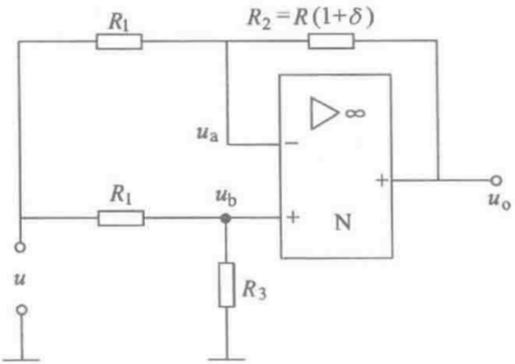
- u u u相当于差动放大器的共模电压
- u a = [ ( u o − u ) R 1 / ( R 2 + R 1 ) ] + u u_a=[(u_o-u)R_1/(R_2+R_1)]+u ua=[(uo−u)R1/(R2+R1)]+u
- u b = u R 3 R 1 + R 3 u_b=u\frac{R_3}{R_1+R_3} ub=uR1+R3R3
- u o = R 3 − R 2 R 1 + R 3 u u_o=\frac{R_3-R_2}{R_1+R_3}u uo=R1+R3R3−R2u
- R 3 = R R_3=R R3=R
- u o = − R u R 1 + R δ u_o=-\frac{Ru}{R_1+R}\delta uo=−R1+RRuδ
- R 3 = R R_3=R R3=R
- 量程大, 灵敏度低