前段时间学习了高博的《视觉SLAM十四讲》第7讲——视觉里程计1,这一块主要介绍了视觉SLAM前端(视觉里程计)部分中的特征点法。其中我在我的另一篇博客中比较了基于opencv库函数和手写ORB匹配算法的差别,有兴趣的可以去看看,欢迎评论共同学习。以下提供链接:
《视觉slam十四讲》学习笔记——ch7实践部分 比较opencv库下的ORB特征的提取和手写ORB的区别
在这篇博客中,我就不过多的介绍ORB特征点匹配的相关概念了,主要介绍如何在得到匹配好的点对后,根据点对来估计相机运动。
目录
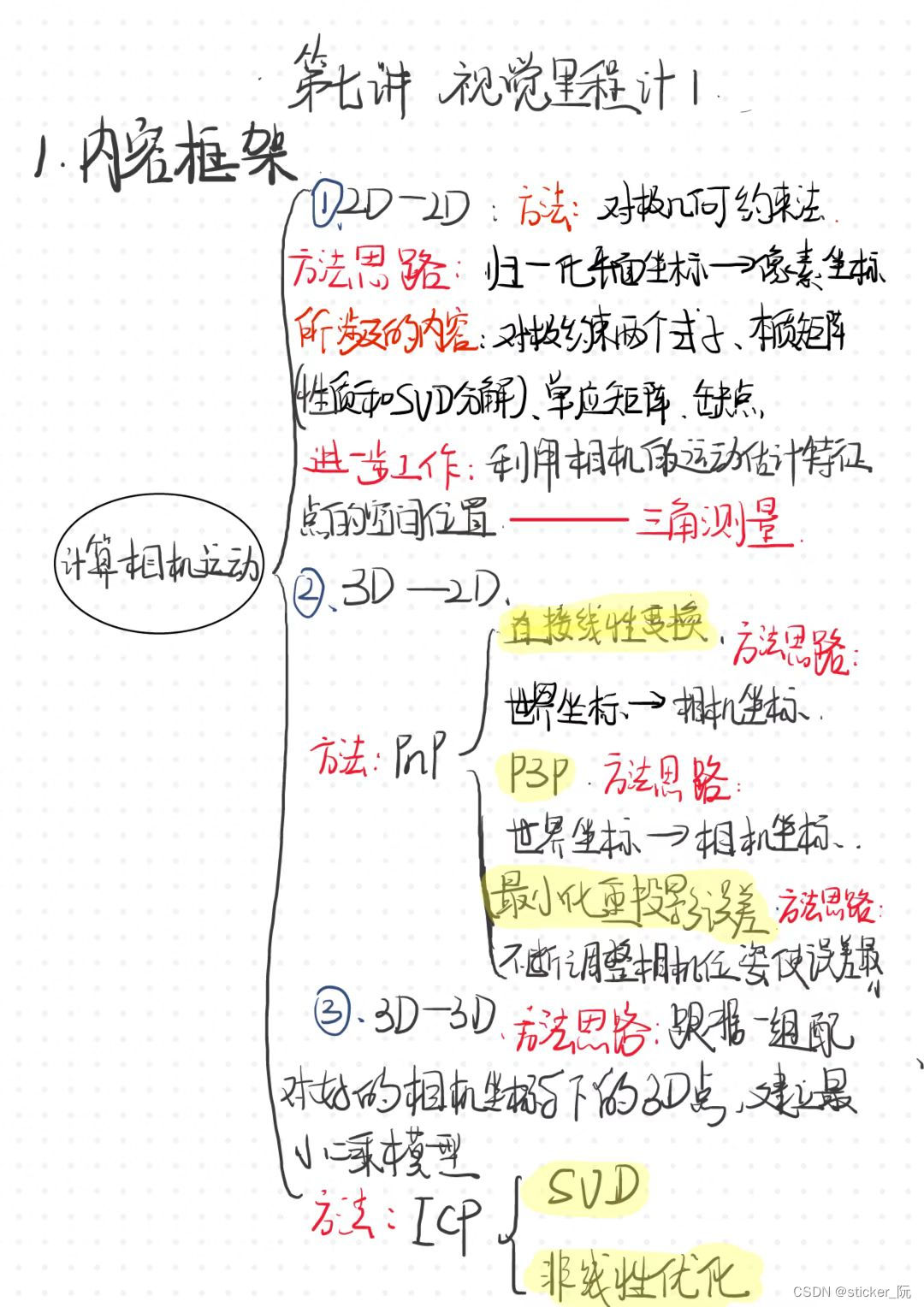
以下是我总结归纳出的这部分内容框架:
1.内容框架
2.主要内容
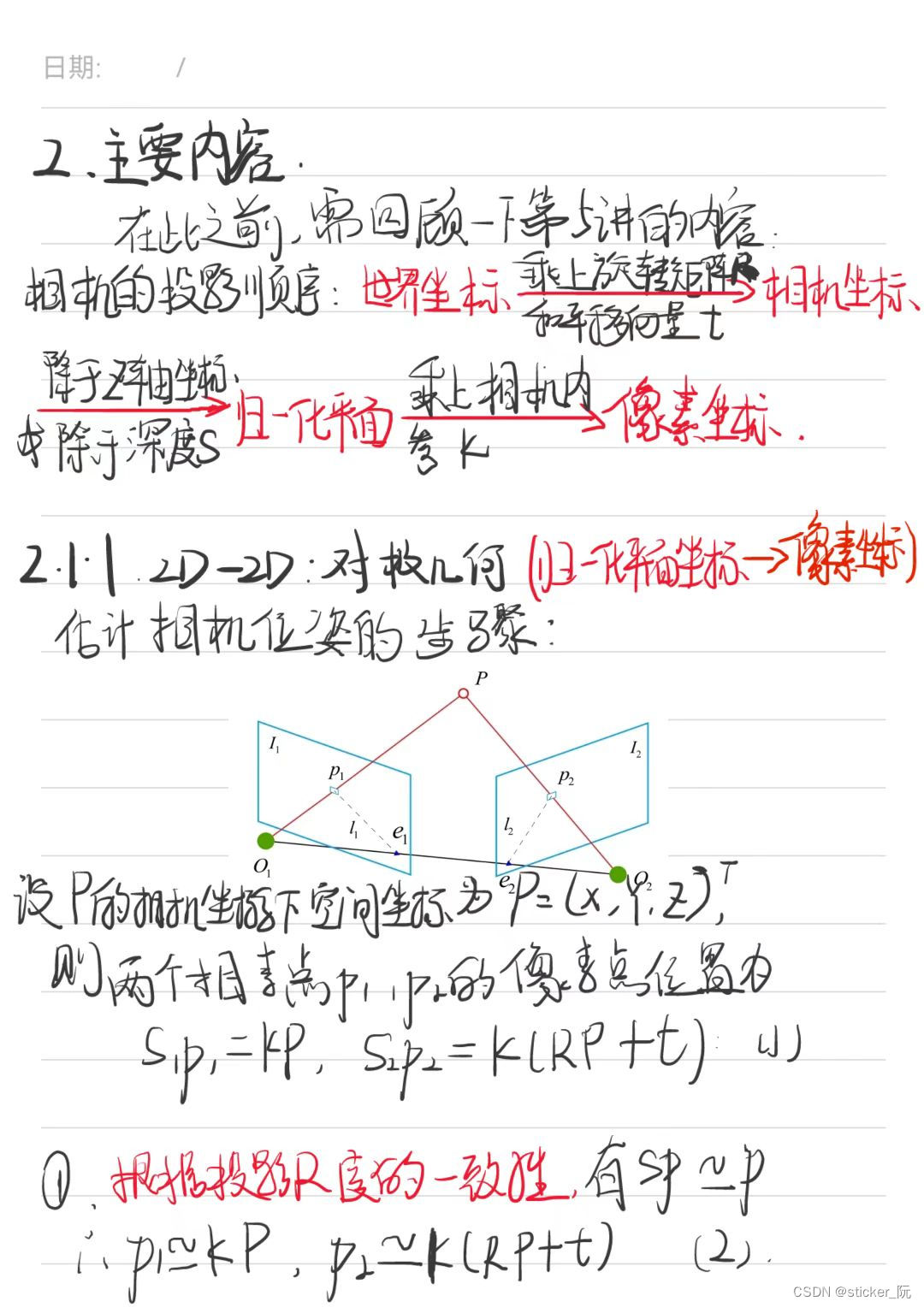
2.1 2D-2D:对极几何
对于对极几何的相关知识,我做了一些学习笔记和总结,如下图所示:
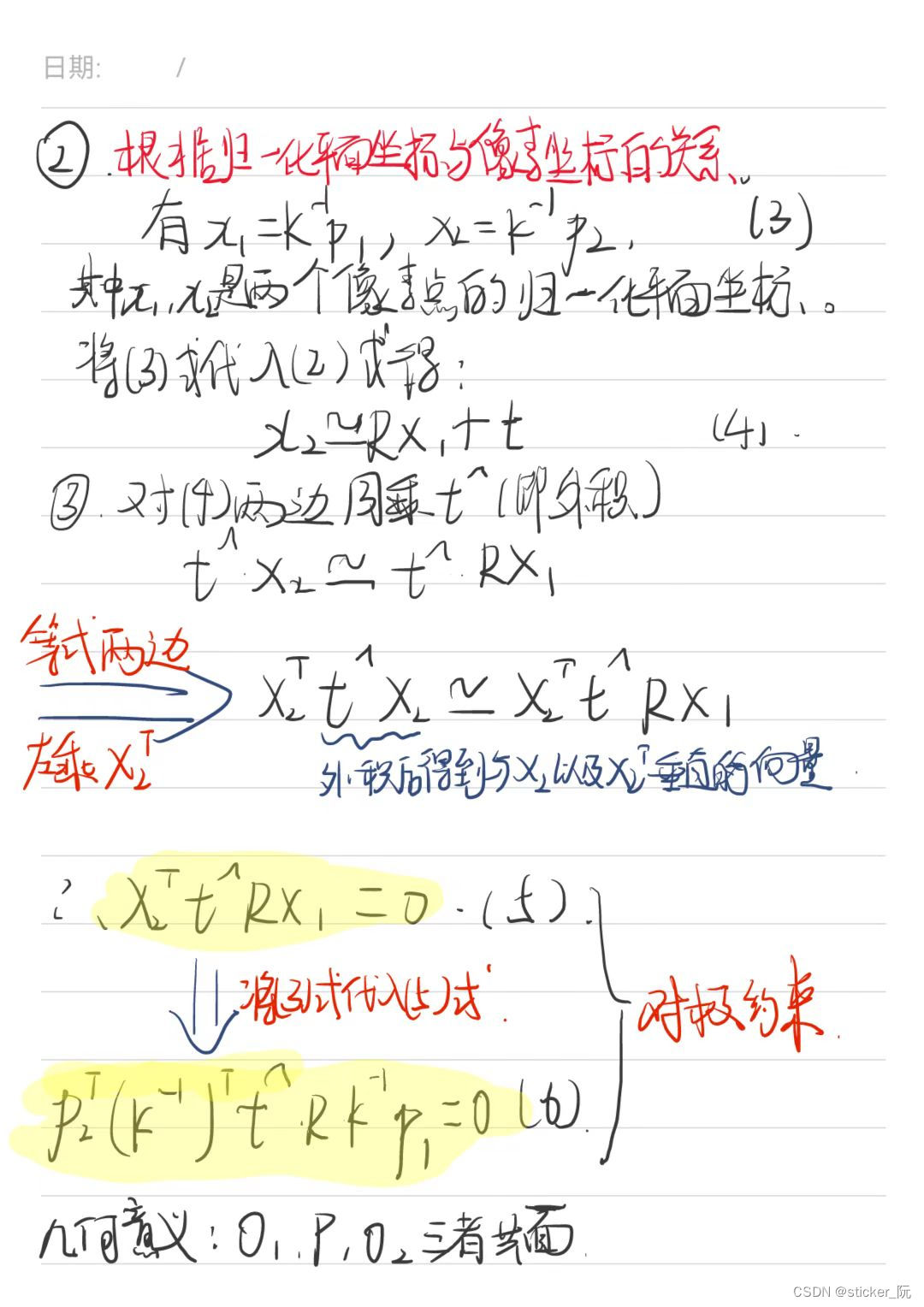
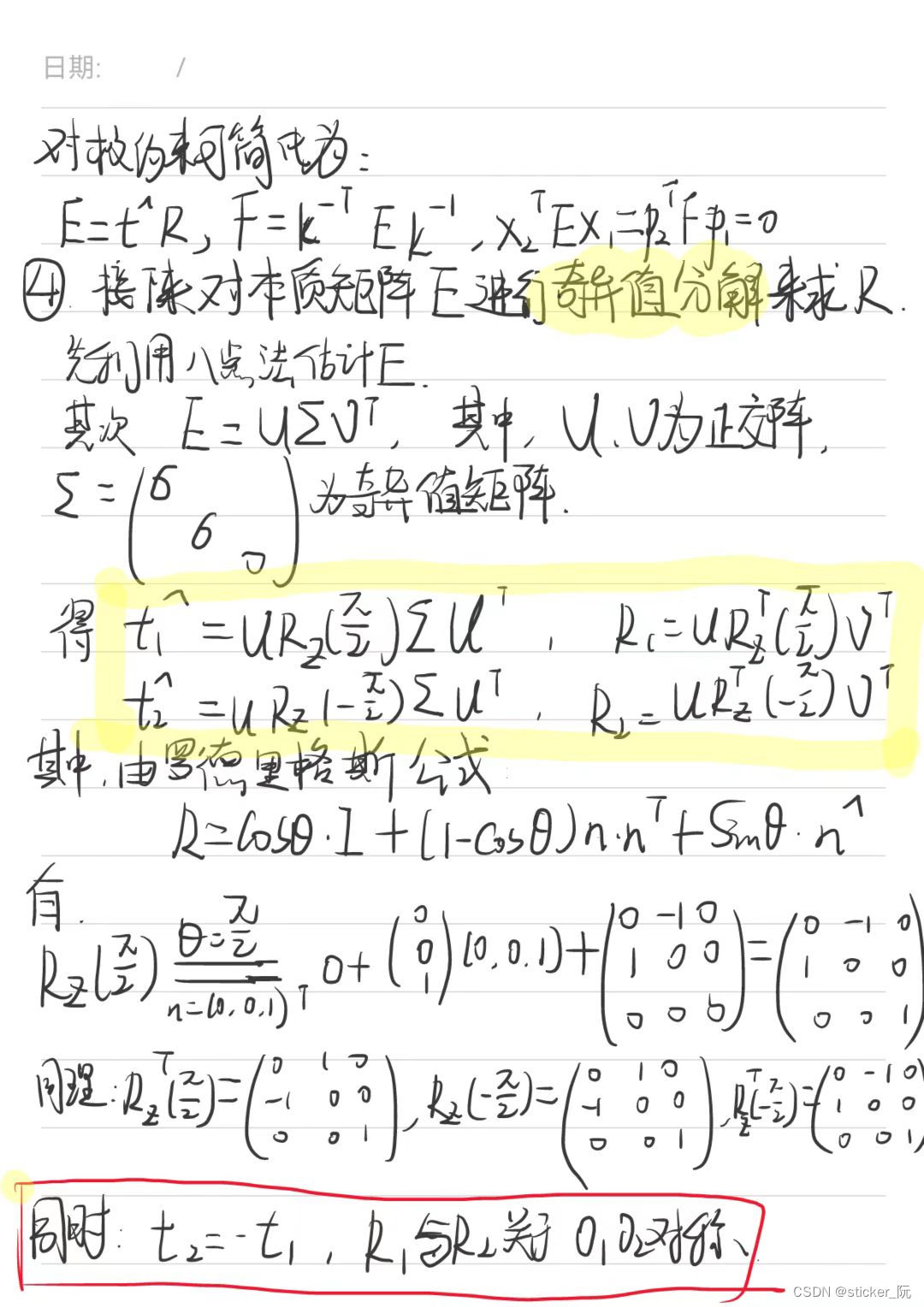
2.1.1 对极几何求解过程

2.1.2 单应矩阵相关知识
以下是单应矩阵相关笔记:

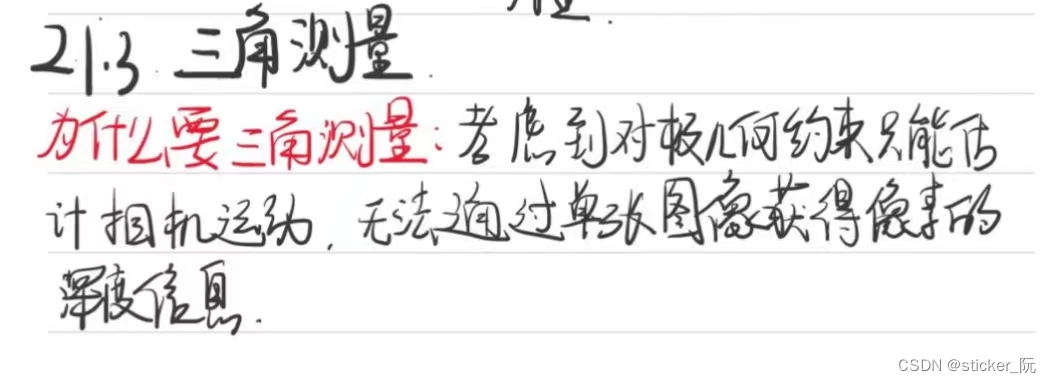
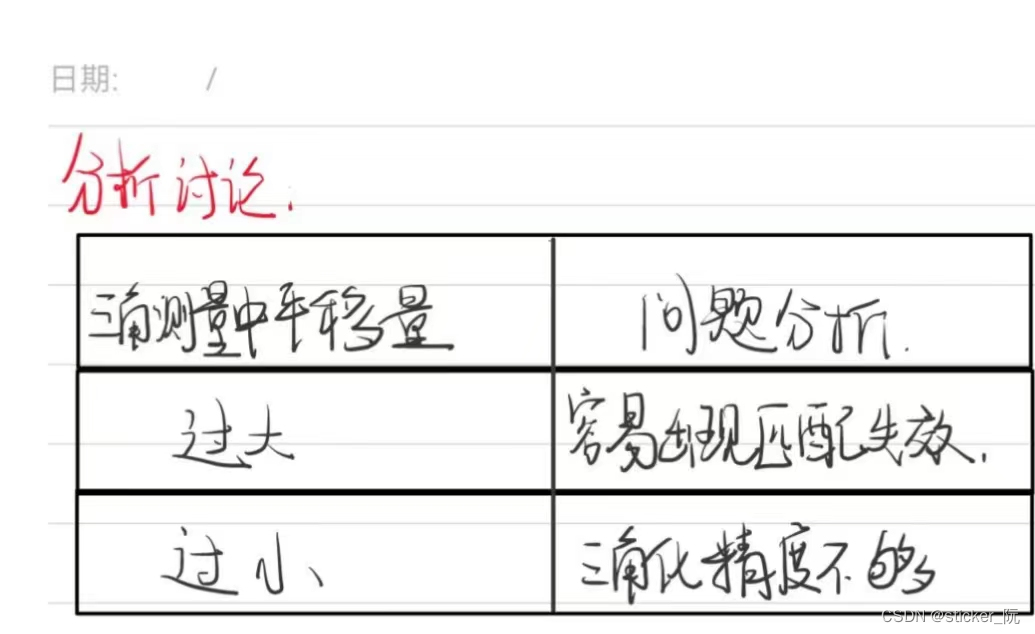
2.1.3 三角测量相关知识
以下是三角测量相关笔记:

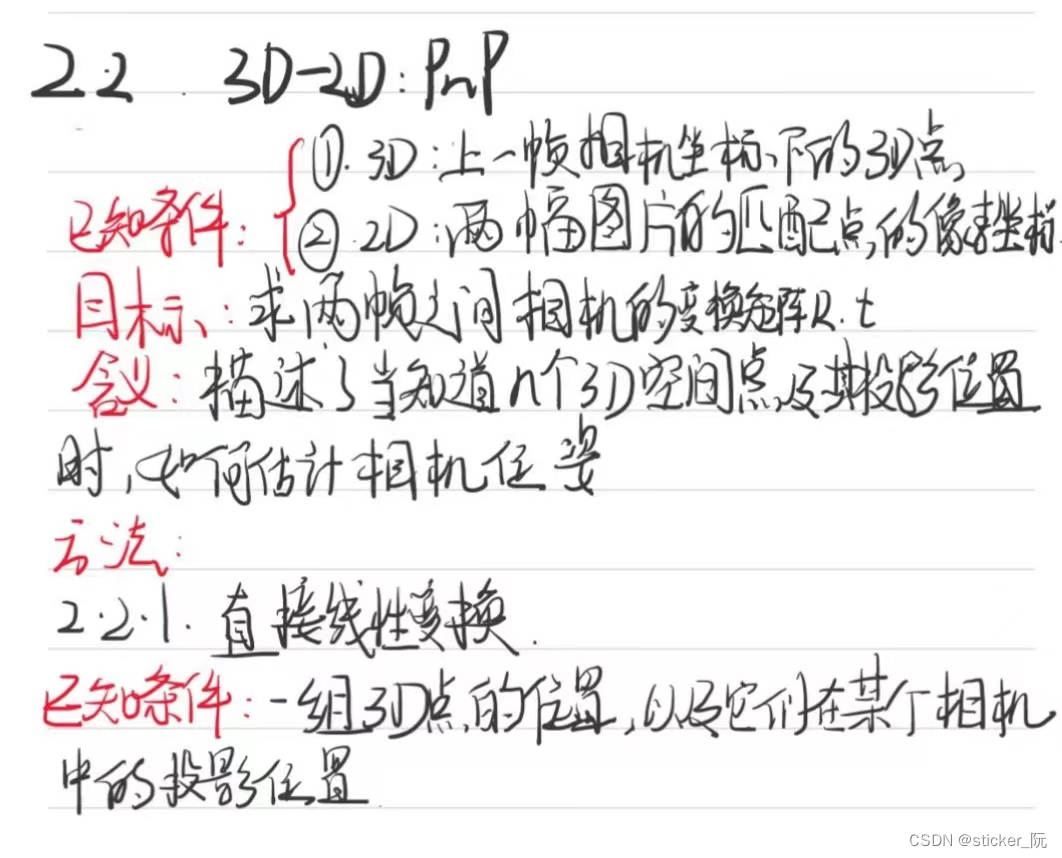
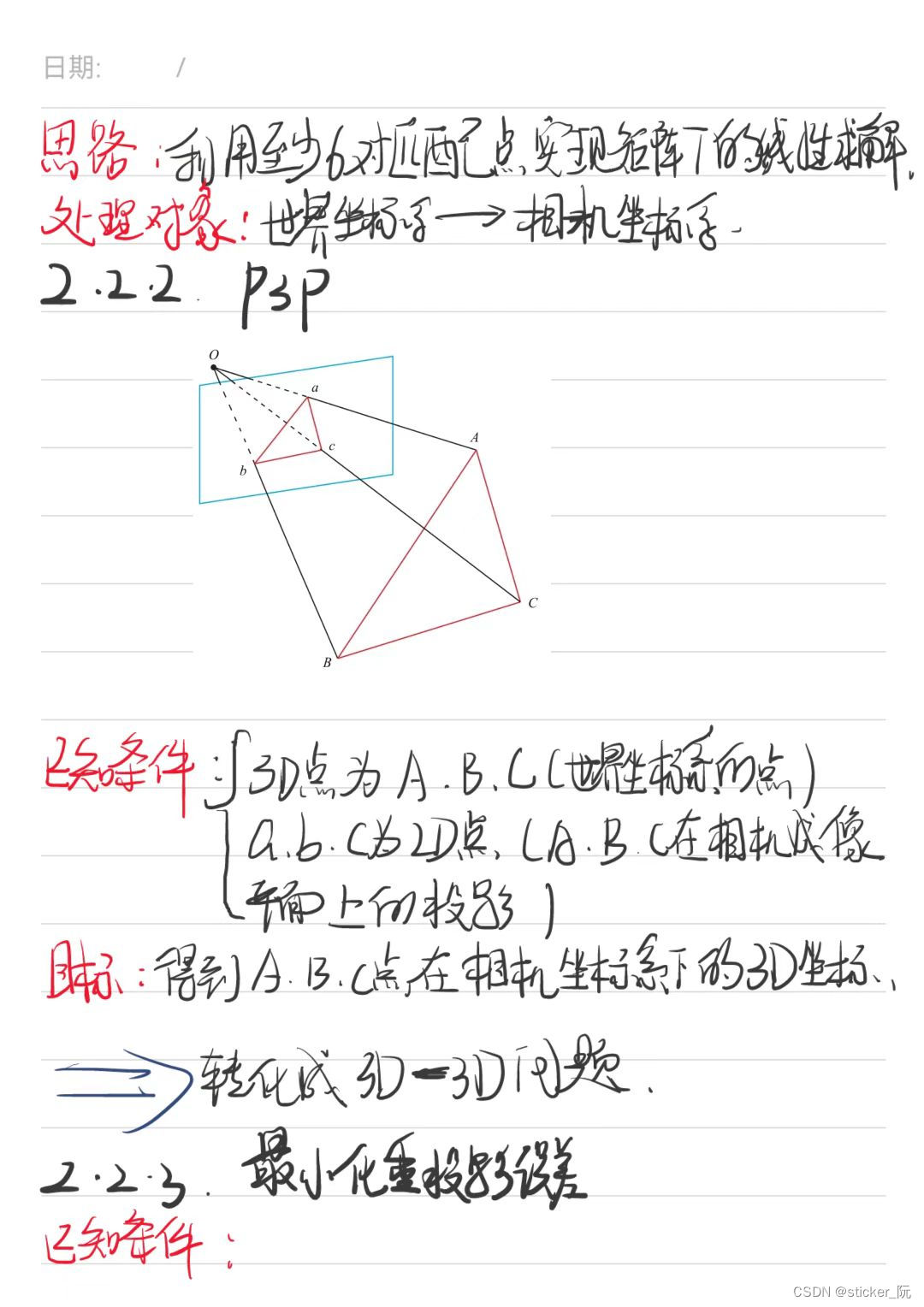
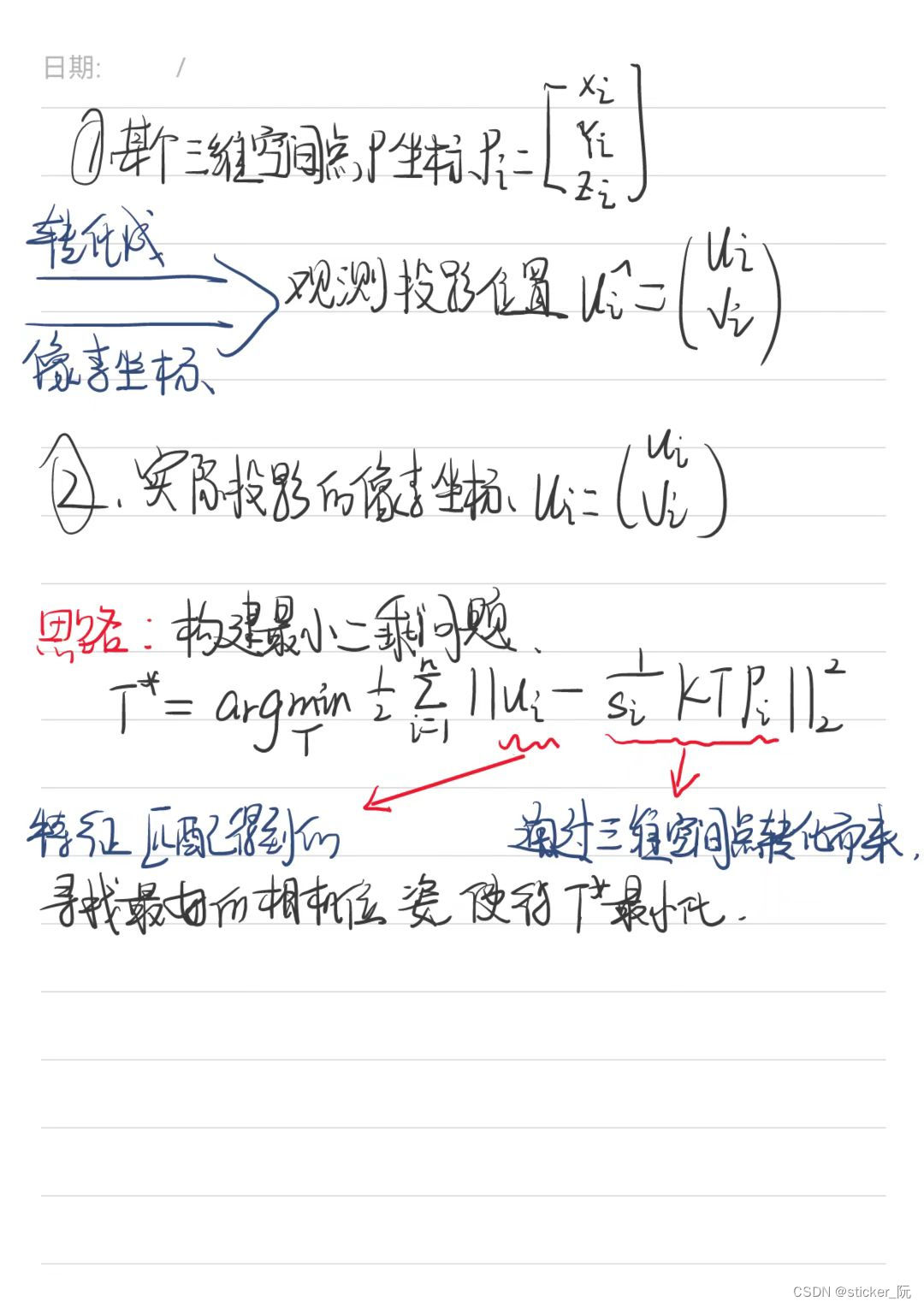
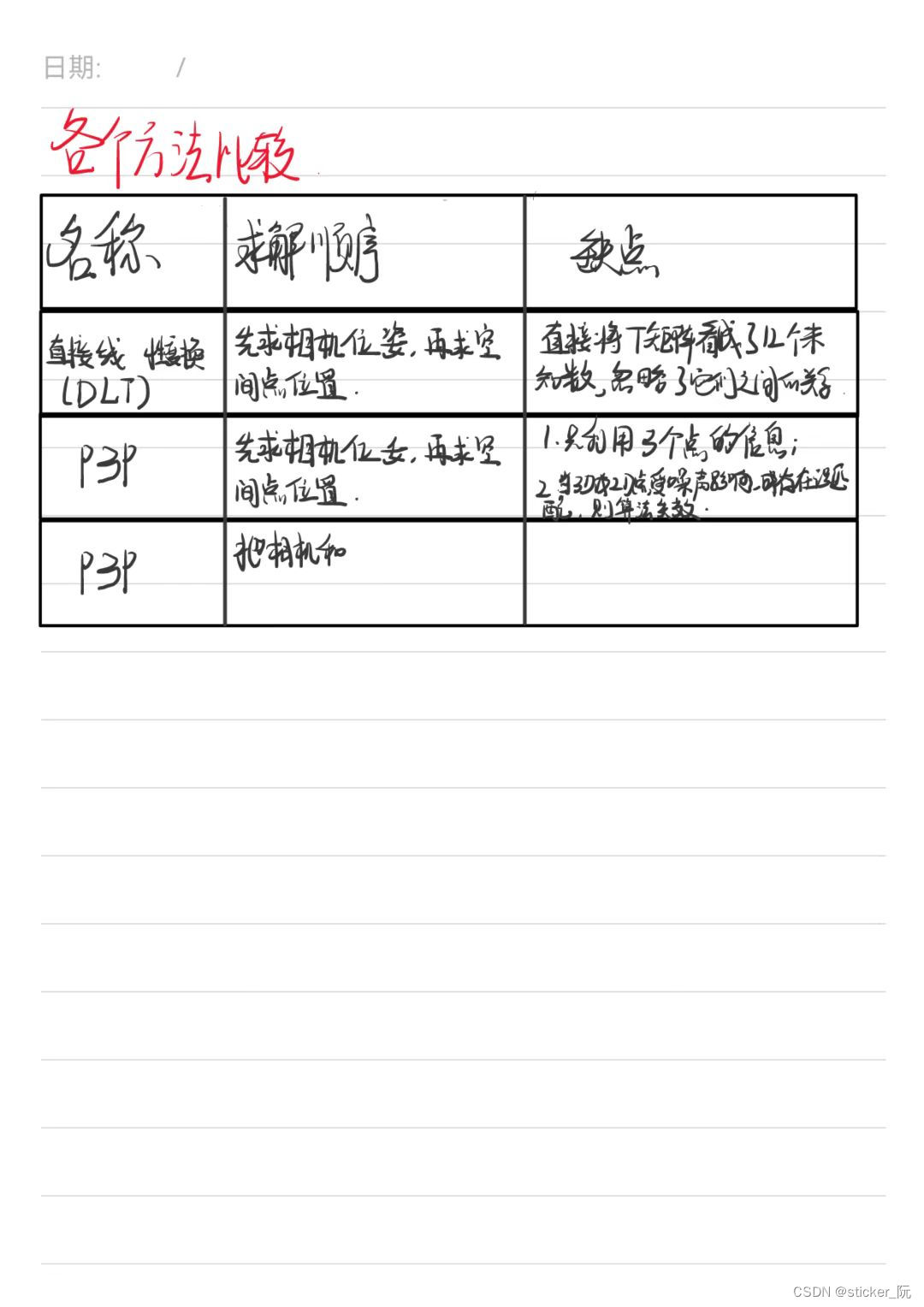
2.2 3D-2D:PnP
对于3D-2D情况,采取的是PnP方法,以下是我的学习笔记:
 2.3 3D-3D:ICP
2.3 3D-3D:ICP
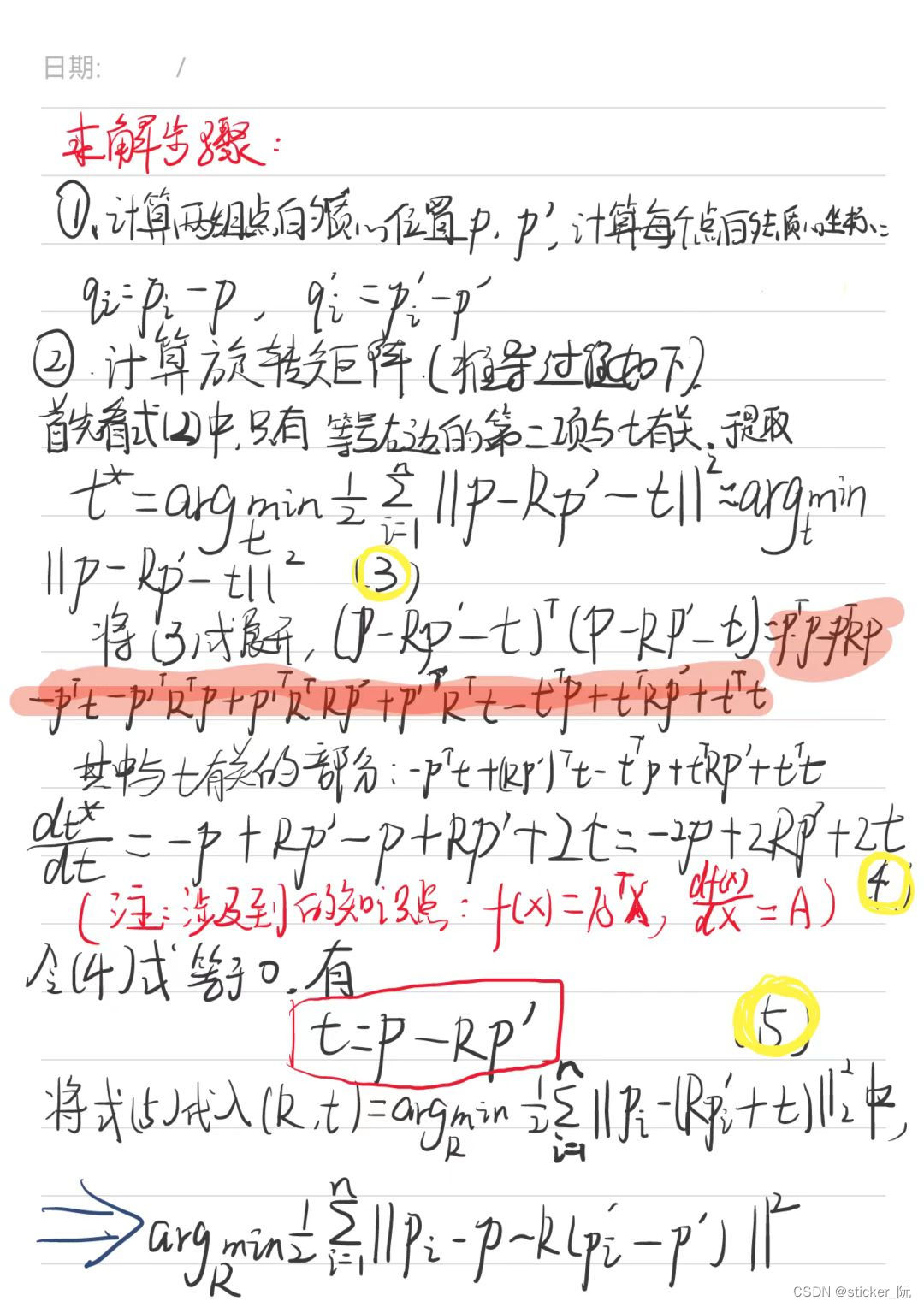
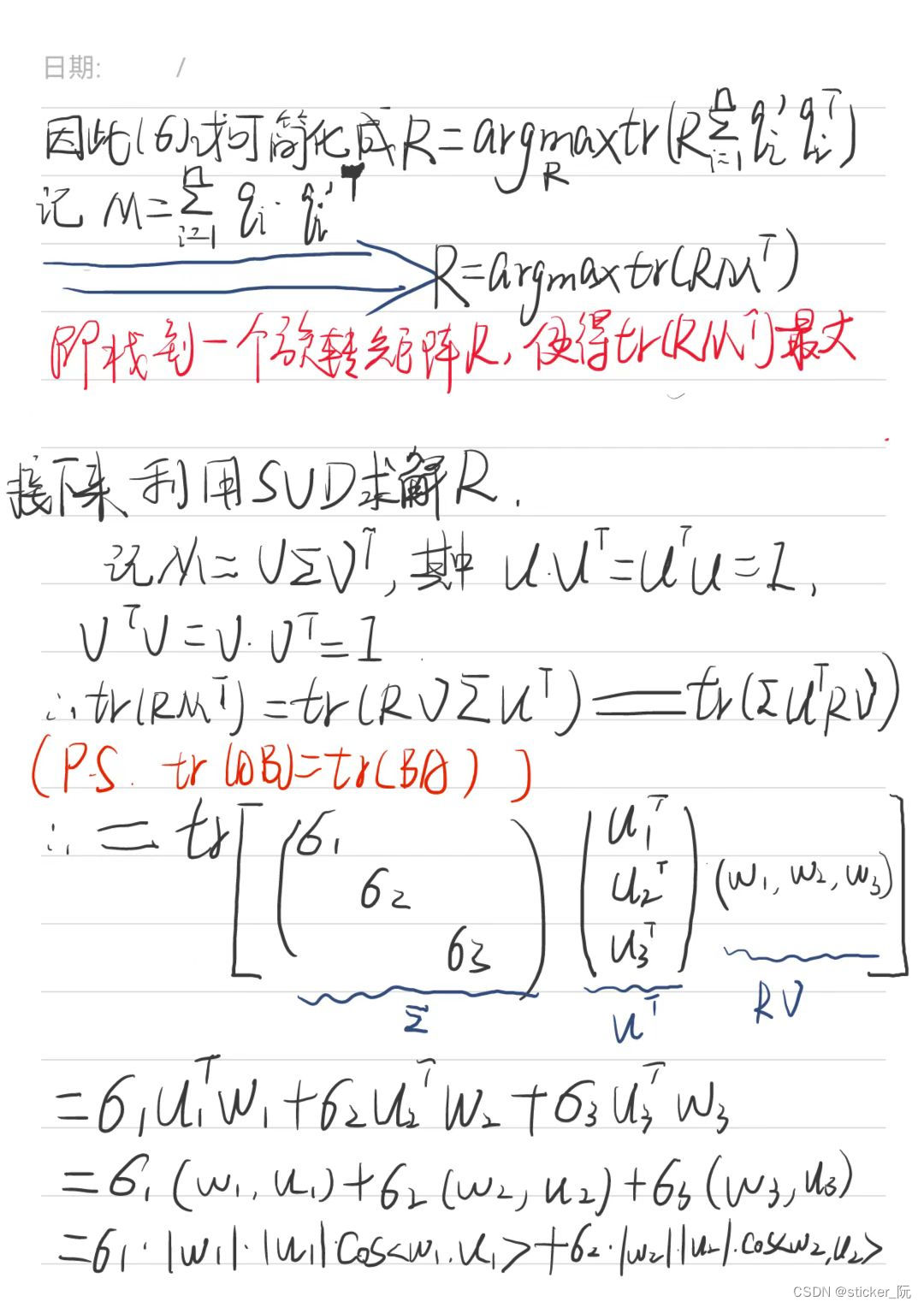
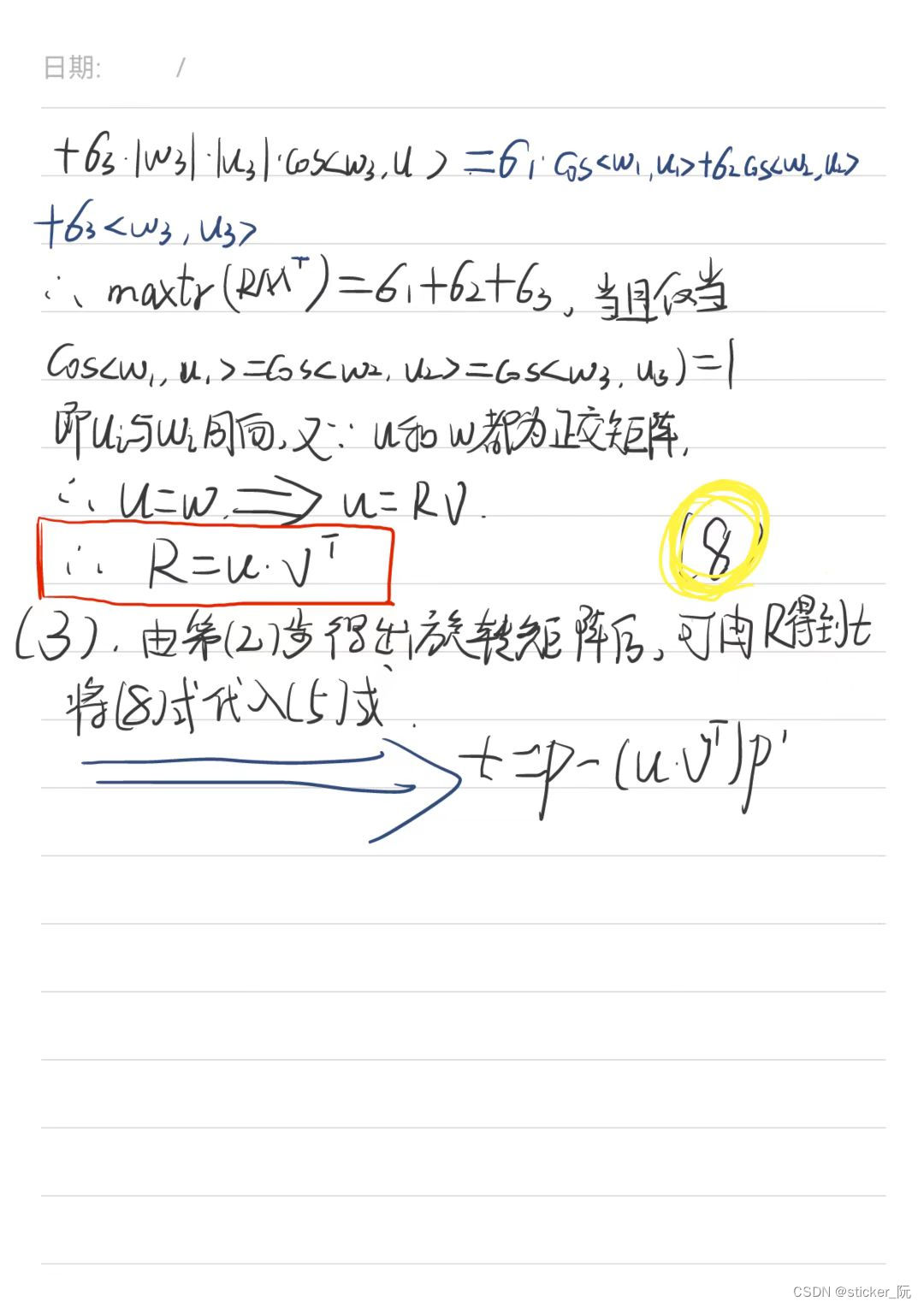
2.3.1 SVD方法
对于3D-3D的情况,采用的方法是ICP,以下是我的学习笔记: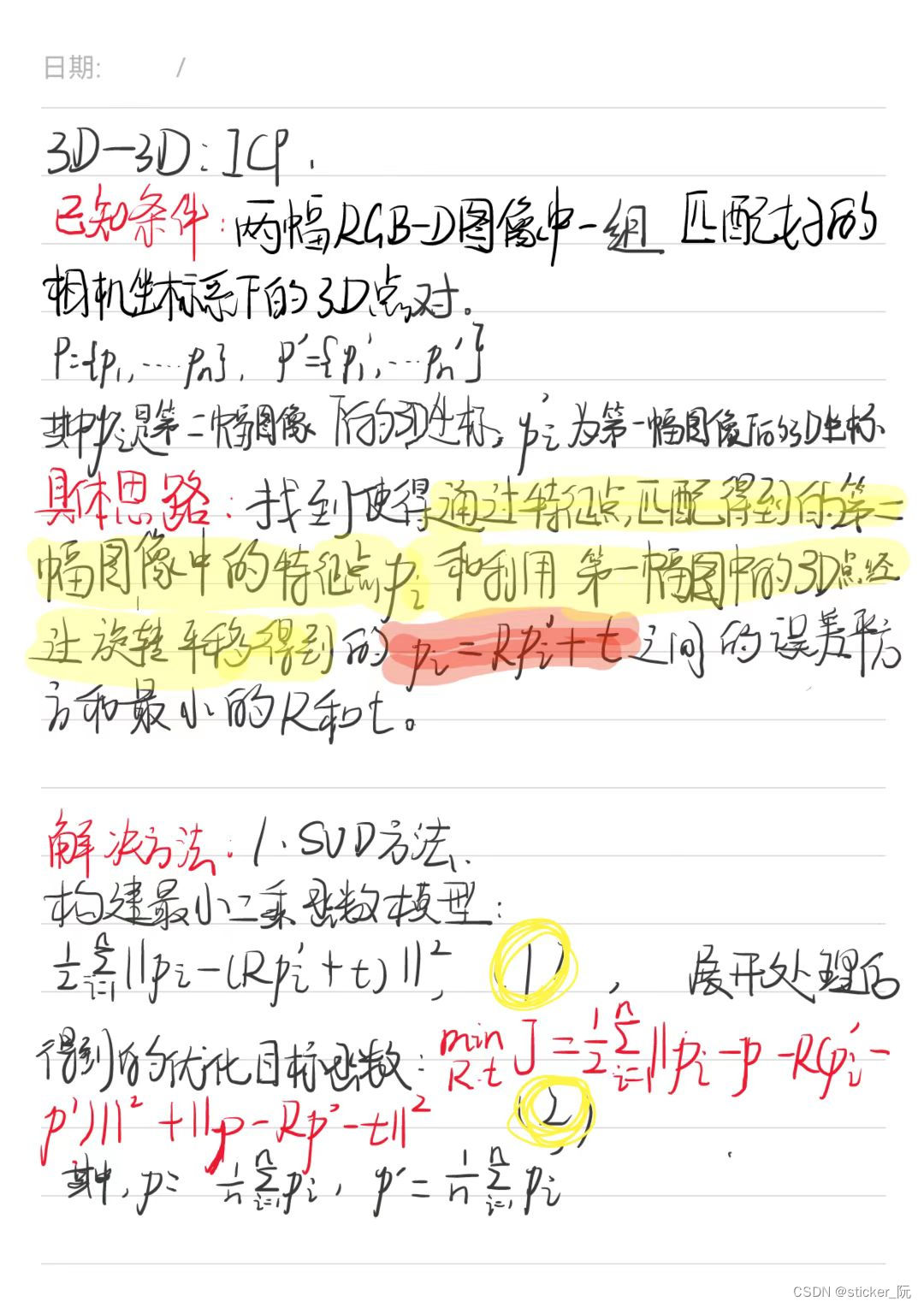

2.3.2 非线性优化方法
以下是非线性优化相关笔记:

3. 总结
以上是我对视觉里程计1——特征点法的学习笔记,字写的有点潦草,还望各位读者海涵。如有什么疑问或建议,欢迎在评论区留言。