本文参考了Adam大佬的帖子
https://blog.csdn.net/AdamShan/article/details/78265754
原贴的公式有一点点错误,这里已经修正了,并给出了代码实现。
CTRV模型
我们通常所使用的匀速CV,匀加速CA模型,是线性模型,没有考虑到目标的转向运动,所以在进行目标位置预测的时候会有一些误差。
所以,有一种更精确的模型可以描述目标的运动,也就是恒速度恒角速度运动模型,CTRV。
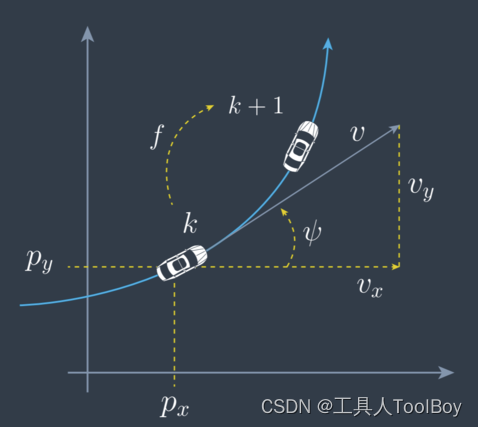
在CTRV中,我们认为目标有位置x,y,速度v(xy合速度),朝向角θ,以及角速度ω。这五个参数组成了状态向量。
x → ( t ) = ( x y v θ ω ) T \overrightarrow {x} (t)= (x y v \theta \omega )^ {T} x(t)=(xyvθω)T
所以,在 ω \omega ω 不为0的时候,状态向量可以写成这样子:
x → ( t + Δ t ) = g ( x ( t ) ) = ( v ω sin ( ω Δ t + θ ) − v ω sin ( θ ) + x ( t ) − v ω cos ( ω Δ t + θ ) + v ω cos ( θ ) + y ( t ) v ω Δ t + θ ω ) , ω ≠ 0 \overrightarrow{\mathrm{x}}(\mathrm{t}+\Delta \mathrm{t})=\mathrm{g}(\mathrm{x}(\mathrm{t}))=\left(\begin{array}{c}\frac{\mathrm{v}}{\omega} \sin (\omega \Delta \mathrm{t}+\theta)-\frac{\mathrm{v}}{\omega} \sin (\theta)+\mathrm{x}(\mathrm{t}) \\ -\frac{\mathrm{v}}{\omega} \cos (\omega \Delta \mathrm{t}+\theta)+\frac{\mathrm{v}}{\omega} \cos (\theta)+\mathrm{y}(\mathrm{t}) \\ \mathrm{v} \\ \omega \Delta \mathrm{t}+\theta \\ \omega\end{array}\right), \quad \omega \neq 0 x(t+Δt)=g(x(t))=⎝⎜⎜⎜⎜⎛ωvsin(ωΔt+θ)−ωvsin(θ)+x(t)−ωvcos(ωΔt+θ)+ωvcos(θ)+y(t)vωΔt+θω⎠⎟⎟⎟⎟⎞,ω=0
但是, ω \omega ω为0的时候,上面的公式分母中会出现0,所以,需要写成这样:
x → ( t + Δ t ) = g ( x ( t ) ) = ( v cos ( θ ) Δ t + x ( t ) v sin ( θ ) Δ t + y ( t ) v ω Δ t + θ ω ) , ω = 0 \overrightarrow{\mathrm{x}}(\mathrm{t}+\Delta \mathrm{t})=\mathrm{g}(\mathrm{x}(\mathrm{t}))=\left(\begin{array}{c}\mathrm{v} \cos (\theta) \Delta \mathrm{t}+\mathrm{x}(\mathrm{t}) \\ \mathrm{v} \sin (\theta) \Delta \mathrm{t}+\mathrm{y}(\mathrm{t}) \\ \mathrm{v} \\ \omega \Delta \mathrm{t}+\theta \\ \omega\end{array}\right), \quad \omega=0 x(t+Δt)=g(x(t))=⎝⎜⎜⎜⎜⎛vcos(θ)Δt+x(t)vsin(θ)Δt+y(t)vωΔt+θω⎠⎟⎟⎟⎟⎞,ω=0
EKF扩展卡尔曼滤波器
在看本文之前,想必你已经能够理解并且掌握KF滤波器。但是我们知道,KF是一个纯线性滤波器,也就是只能支持匀速和匀加速模型(也就是CV和CA)。如果我们需要引入CTRV,就需要扩展卡尔曼滤波器EKF。那么它是什么原理呢?
我们知道,想要使用卡尔曼滤波器的五个公式,必须保证状态转移矩阵是线性模型,因为误差矩阵只有线性变换之后才能保证还是高斯分布。
所以,我们想要使用非线性的CTRV模型,就必须想一个办法进行近似,让这些方程变成线性方程。
那么方法来了,在大学上过高数的小伙伴一定学过泰勒级数这个神器。泰勒级数的作用是,将一切函数,用导数的方式进行展开,只要展开的级数足够多,最后就可以无限逼近原函数。
T ( x ) = f ( u ) + ( x − u ) Df ( u ) + 1 2 ! ( x − u ) 2 D 2 f ( u ) + … \mathrm{T}(\mathrm{x})=\mathrm{f}(\mathrm{u})+(\mathrm{x}-\mathrm{u}) \operatorname{Df}(\mathrm{u})+\frac{1}{2 !}(\mathrm{x}-\mathrm{u})^{2} \mathrm{D}^{2} \mathrm{f}(\mathrm{u})+\ldots T(x)=f(u)+(x−u)Df(u)+2!1(x−u)2D2f(u)+…
我们发现,这里的一阶展开刚好是一个线性函数。CTRV的一阶泰勒展开就是它的近似线性化方程。
但是也可以发现,这是一种有损的近似,展开点距离越远,误差就越大,当展开点足够近的时候,误差就可以忽略。
在自动驾驶领域,由于采样频率通常可以达到20Hz以上,所以一阶泰勒级数可以进行比较准确的近似。
那么剩下的工作就只剩下求一阶导了。我们对卡尔曼滤波中的状态转移矩阵F中的元素,替换为状态转移方程的偏导数,就可以得到雅克比矩阵 J F J_F JF 用这个雅克比矩阵替换卡尔曼滤波中的F,就可以完成预测之后的误差更新了。
对于CTRV模型,求导之后的雅克比矩阵如下( ω ≠ 0 \omega \neq 0 ω=0):
J F = [ 1 0 1 ω ( − sin ( θ ) + sin ( Δ t ω + θ ) ) v ω ( − cos ( θ ) + cos ( Δ t ω + θ ) ) Δ t v ω cos ( Δ t ω + θ ) − v ω 2 ( − sin ( θ ) + sin ( Δ t ω + θ ) ) 0 1 1 ω ( cos ( θ ) − cos ( Δ t ω + θ ) ) v ω ( − sin ( θ ) + sin ( Δ t ω + θ ) ) Δ t v ω sin ( Δ t ω + θ ) − v ω 2 ( cos ( θ ) − cos ( Δ t ω + θ ) ) 0 0 1 0 0 0 0 0 1 Δ t 0 0 0 0 1 ] \mathrm{J}_{\mathrm{F}}=\left[\begin{array}{cccc} 1 & 0 & \frac{1}{\omega}(-\sin (\theta)+\sin (\Delta \mathrm{t} \omega+\theta)) & \frac{\mathrm{v}}{\omega}(-\cos (\theta)+\cos (\Delta \mathrm{t} \omega+\theta))& \frac{\Delta \mathrm{tv}}{\omega} \cos (\Delta \mathrm{t} \omega+\theta)-\frac{\mathrm{v}}{\omega^{2}}(-\sin (\theta)+\sin (\Delta \mathrm{t} \omega+\theta))\\ 0 & 1 & \frac{1}{\omega}(\cos (\theta)-\cos (\Delta \mathrm{t} \omega+\theta)) & \frac{\mathrm{v}}{\omega}(-\sin (\theta)+\sin (\Delta \mathrm{t} \omega+\theta))&\frac{\Delta \mathrm{tv}}{\omega} \sin (\Delta \mathrm{t} \omega+\theta)-\frac{\mathrm{v}}{\omega^{2}}(\cos (\theta)-\cos (\Delta \mathrm{t} \omega+\theta))\\ 0 & 0 & 1 & 0 & 0\\ 0 & 0 & 0 & 1 & \Delta \mathrm{t}\\ 0 & 0 & 0 & 0 & 1 \end{array}\right] JF=⎣⎢⎢⎢⎢⎡1000001000ω1(−sin(θ)+sin(Δtω+θ))ω1(cos(θ)−cos(Δtω+θ))100ωv(−cos(θ)+cos(Δtω+θ))ωv(−sin(θ)+sin(Δtω+θ))010ωΔtvcos(Δtω+θ)−ω2v(−sin(θ)+sin(Δtω+θ))ωΔtvsin(Δtω+θ)−ω2v(cos(θ)−cos(Δtω+θ))0Δt1⎦⎥⎥⎥⎥⎤
对于 ω = 0 \omega = 0 ω=0 :
J F = [ 1 0 Δ t cos ( θ ) − Δ t v sin ( θ ) 0 0 1 Δ t sin ( θ ) Δ t v cos ( θ ) 0 0 0 1 0 0 0 0 0 1 Δ t 0 0 0 0 1 ] \mathrm{J}_{\mathrm{F}}=\left[\begin{array}{ccccc} 1 & 0 & \Delta \mathrm{t} \cos (\theta) & -\Delta \mathrm{tv} \sin (\theta) & 0 \\ 0 & 1 & \Delta \mathrm{t} \sin (\theta) & \Delta \mathrm{tv} \cos (\theta) & 0 \\ 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 1 & \Delta \mathrm{t} \\ 0 & 0 & 0 & 0 & 1 \end{array}\right] JF=⎣⎢⎢⎢⎢⎡1000001000Δtcos(θ)Δtsin(θ)100−Δtvsin(θ)Δtvcos(θ)010000Δt1⎦⎥⎥⎥⎥⎤
上面的公式基于原贴,已经对原贴公式的一些错误进行了修正。
在实际应用中,我们收到的传感器感知结果都是基于笛卡尔坐标系的,也就是线性观测。那么我们的观测矩阵还保持不变,不需要求雅克比。(如果你的观测值基于极坐标,那么就需要按照原贴的方法求解了。)
例如,我们的观测值只有位置坐标 x x x y y y,观测矩阵 H H H如下:
J H = H = [ 1 0 0 0 0 0 1 0 0 0 ] J_{H} = \mathrm{H}=\left[\begin{array}{lllll} 1 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 \end{array}\right] JH=H=[1001000000]
总结一下,对于CTRV的EKF,其步骤和KF是一样的,还是那五步,只不过变成了如下的过程:
x k + 1 = g ( x k , u ) \mathrm{x}_{\mathrm{k}+1}=\mathrm{g}\left(\mathrm{x}_{\mathrm{k}}, \mathrm{u}\right) xk+1=g(xk,u)
P k + 1 = J F P k J F T + Q \mathrm{P}_{\mathrm{k}+1}=\mathrm{J}_{\mathrm{F}} \mathrm{P}_{\mathrm{k}} \mathrm{J}_{\mathrm{F}}^{\mathrm{T}}+\mathrm{Q} Pk+1=JFPkJFT+Q
K k = P k J H T ( J H P k J H T + R ) − 1 K_{k}=P_{k} J_{H}^{T}\left(J_{H} P_{k} J_{H}^{T}+R\right)^{-1} Kk=PkJHT(JHPkJHT+R)−1
x k = x k + K k ( z k − h ( x k ) ) x_{k}=x_{k}+K_{k}\left(z_{k}-h\left(x_{k}\right)\right) xk=xk+Kk(zk−h(xk))
P k = ( I − K k J H ) P k \mathrm{P}_{k}=\left(I-K_{k} J_{H}\right) P_{k} Pk=(I−KkJH)Pk
代码实现
求雅克比矩阵最好通过ceres库来进行。但是,我们其实只需要CTRV,所以不如直接手写。
这里我只做了J_f的实现,供大家参考。
由于观测值只有XY,观测方程实际上还是线性的,所以不需要J_h,直接用原来的H即可 ( J H = H J_{H}=H JH=H) 。
void EKF::predict_ctrv() {
double dt = 0.1;
double x = x_hat(0);
double y = x_hat(1);
double v = x_hat(2);
double yaw = x_hat(3);
double yaw_rate = x_hat(4);
Eigen::MatrixXd J_f(5, 5);
if (yaw_rate > 0.000001) {
//这是yaw_rate(omega)不为0的情况
double J_x_x = 1;
double J_x_y = 0;
double J_x_v = (1 / yaw_rate) * (sin(yaw + yaw_rate * dt) - sin(yaw));
double J_x_yaw = (v / yaw_rate) * (cos(yaw + yaw_rate * dt) - cos(yaw));
double J_x_yaw_rate = dt * (v / yaw_rate) * cos(yaw + yaw_rate * dt) - ((v / (yaw_rate * yaw_rate)) * (sin(yaw + yaw_rate * dt) - sin(yaw)));
double J_y_x = 0;
double J_y_y = 1;
double J_y_v = (1 / yaw_rate) * (cos(yaw) - cos(yaw + yaw_rate * dt));
double J_y_yaw = (v / yaw_rate) * (sin(yaw + yaw_rate * dt) - sin(yaw));
double J_y_yaw_rate = dt * (v / yaw_rate) * sin(yaw + yaw_rate * dt) - ((v / (yaw_rate * yaw_rate)) * (cos(yaw) - cos(yaw + yaw_rate * dt)));
J_f << J_x_x, J_x_y, J_x_v, J_x_yaw, J_x_yaw_rate, J_y_x, J_y_y, J_y_v, J_y_yaw, J_y_yaw_rate, 0, 0, 1, 0, 0, 0, 0, 0, 1, dt, 0, 0, 0, 0, 1;
//状态向量的预测直接用状态转移方程
x = x + v / yaw_rate * (sin(yaw + yaw_rate * dt) - sin(yaw));
y = y + v / yaw_rate * (-cos(yaw + yaw_rate * dt) + cos(yaw));
v = v;
yaw = yaw + yaw_rate * dt;
yaw_rate = yaw_rate;
x_hat << x, y, v, yaw, yaw_rate;
//协方差矩阵的更新用上面求好的雅克比矩阵
P = J_f * P * J_f.transpose() + Q;
} else {
//这是yaw_rate(omega)为0的情况
double J_x_x = 1;
double J_x_y = 0;
double J_x_v = dt * cos(yaw);
double J_x_yaw = -1 * dt * v * sin(yaw);
double J_x_yaw_rate = 0;
double J_y_x = 0;
double J_y_y = 1;
double J_y_v = dt * sin(yaw);
double J_y_yaw = dt * v * cos(yaw);
double J_y_yaw_rate = 0;
J_f << J_x_x, J_x_y, J_x_v, J_x_yaw, J_x_yaw_rate, J_y_x, J_y_y, J_y_v, J_y_yaw, J_y_yaw_rate, 0, 0, 1, 0, 0, 0, 0, 0, 1, dt, 0, 0, 0, 0, 1;
x = x + v * cos(yaw) * dt;
y = y + v * sin(yaw) * dt;
v = v;
yaw = yaw + yaw_rate * dt;
yaw_rate = yaw_rate;
x_hat << x, y, v, yaw, yaw_rate;
P = J_f * P * J_f.transpose() + Q;
}
}