Weakly-Supervised Action Localization with Expectation-Maximization Multi-Instance Learning(EM-MIL)
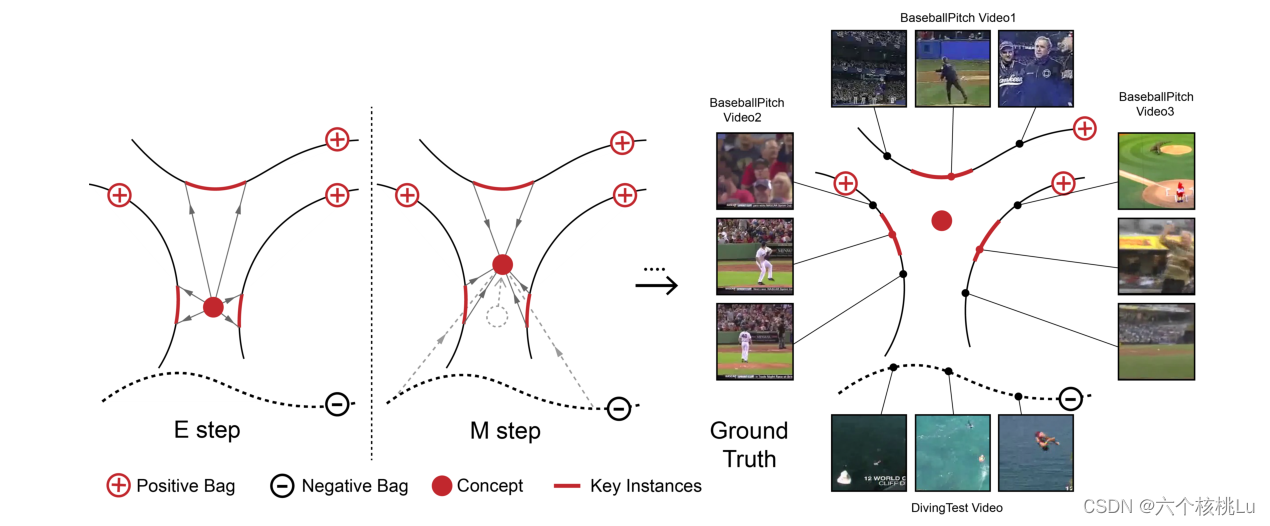
每条曲线表示一个袋子,曲线上的点表示袋子中的实例。目标是找到一个概念点,这样每个正袋包含一些接近它的关键实例,而负袋中的所有实例都远离它。在E步骤中,使用当前的概念为每个积极的包选择关键实例。在M步中,使用关键实例和负包来更新概念。
Weakly-Supervised Action Localization with Expectation-Maximization Multi-Instance Learning(EM-MIL)
每条曲线表示一个袋子,曲线上的点表示袋子中的实例。目标是找到一个概念点,这样每个正袋包含一些接近它的关键实例,而负袋中的所有实例都远离它。在E步骤中,使用当前的概念为每个积极的包选择关键实例。在M步中,使用关键实例和负包来更新概念。