文章目录
资料援引
B站视频:wow,神奇的贝塞尔曲线!
博客:贝塞尔曲线简单介绍
知乎:曲线篇: 贝塞尔曲线
贝塞尔曲线的用途
- 基于对汽车的的车身结构进行流体化设计而诞生
- 处理视频状态点之间的图像变化
- 随心所欲绘制曲线,比如:
一阶贝塞尔(bezier)曲线

如上, P 0 P_0 P0、 P 1 P_1 P1 两点构成了一条线段,而我们可以通过一个函数——线性插值(lerp),来根据一个 t t t 值( t ∈ [ 0 , 1 ] t \in [0,1] t∈[0,1]) 得到线段上一点 P P P(图中一直在滑动的点)。而 P P P 的运动轨迹(红线),便是一阶贝塞尔线段(曲线)。线性插值的数学形式(一阶贝塞尔曲线公式)为:
P = l e r p ( P 0 , P 1 , t ) = ( 1 − t ) P 0 + t P 1 P=lerp(P_0,P_1,t)=(1-t)P_0 + tP_1 P=lerp(P0,P1,t)=(1−t)P0+tP1
一阶贝塞尔曲线有两个端点( P 0 P_0 P0、 P 1 P_1 P1 ),0个控制点。
二阶贝塞尔(bezier)曲线

如上,假设现在有点 P 2 P_2 P2 ,它与 P 1 P_1 P1 构成了新的线段,我们得到两个 一阶插值点( Q 1 Q_1 Q1、 Q 2 Q_2 Q2),它们构成了绿色线段,值得注意的是,两个插值点具有相同的 t t t 值。
而此时我们在绿色线段上生成一个 二阶插值点( P P P),并让它具有 与两个一阶插值点相同的 t t t 值。 那么该点的运动轨迹就是 二阶贝塞尔曲线。其公式推导为:
- 绿色线段左端点的运动轨迹:
Q 1 = ( 1 − t ) P 0 + t P 1 Q_1 = (1-t)P_0 + tP_1 Q1=(1−t)P0+tP1
- 绿色线段右端点的运动轨迹:
Q 2 = ( 1 − t ) P 1 + t P 2 Q_2 = (1-t)P_1 + tP_2 Q2=(1−t)P1+tP2
- 二阶贝塞尔曲线公式:
P = ( 1 − t ) Q 1 + t Q 2 P = (1-t)Q_1 + tQ_2 P=(1−t)Q1+tQ2
= ( 1 − t ) ( ( 1 − t ) P 0 + t P 1 ) + t ( ( 1 − t ) P 1 + t P 2 ) =(1-t)((1-t)P_0 + tP_1) + t((1-t)P_1 + tP_2) =(1−t)((1−t)P0+tP1)+t((1−t)P1+tP2)
= ( 1 − t ) 2 P 0 + 2 t ( t − 1 ) P 1 + t 2 P 2 =(1-t)^2P_0+2t(t-1)P_1+t^2P_2 =(1−t)2P0+2t(t−1)P1+t2P2
二阶贝塞尔曲线有两个端点( P 0 P_0 P0、 P 2 P_2 P2),一个控制点( P 1 P_1 P1)。
三阶贝塞尔(bezier)曲线

经过对一阶、二阶贝塞尔曲线的研究学习,我们能知道贝塞尔曲线通过在两点之间再采点的方式实现降阶,每一次选点都是一次的降阶。
- P 0 P_0 P0、 P 1 P_1 P1、 P 2 P_2 P2、 P 3 P_3 P3 通过生成插值点 Q 1 Q_1 Q1、 Q 2 Q_2 Q2、 Q 3 Q_3 Q3 来构成二阶贝塞尔(绿色线段)
- 在此基础上生成插值点 O 1 O_1 O1、 O 2 O_2 O2 来构成一阶贝塞尔(蓝色线段)
- 之后以 O 1 O_1 O1、 O 2 O_2 O2 上的插值点 P P P 的运动轨迹来生成三阶贝塞尔曲线。
公式推导过程同二阶贝塞尔曲线,因此不做赘述,直接贴出公式:
P = ( 1 − t ) 3 P 0 + 3 t ( 1 − t ) 2 P 1 + 3 t 2 ( 1 − t ) P 2 + t 3 P 3 P=(1-t)^3P_0+3t(1-t)^2P_1+3t^2(1-t)P_2+t^3P_3 P=(1−t)3P0+3t(1−t)2P1+3t2(1−t)P2+t3P3
三阶贝塞尔曲线有两个端点( P 0 P_0 P0、 P 3 P_3 P3),两个控制点( P 1 P_1 P1、 P 2 P_2 P2)。
高阶贝塞尔(bezier)曲线
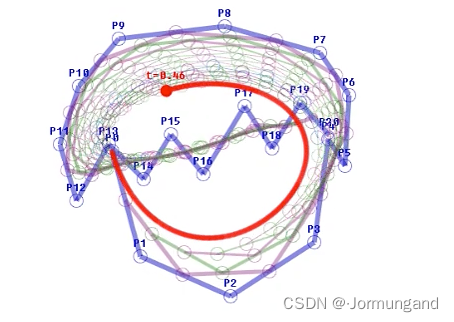
- 四阶贝塞尔曲线示意图:

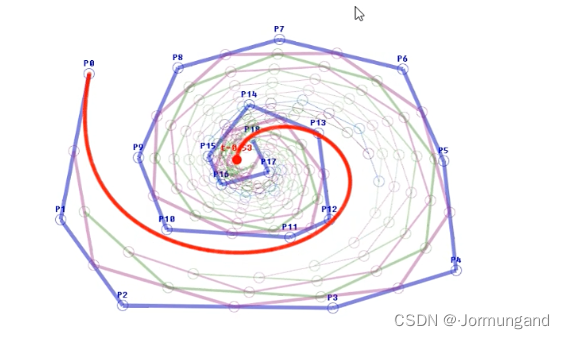
- 五阶贝塞尔曲线示意图:

- 高阶贝塞尔曲线公式:
P ( t ) = ∑ i = 0 n P i B i , n ( t ) , t ∈ [ 0 , 1 ] P(t)=\sum_{i=0}^{n}P_iB_{i,n}(t),t \in [0,1] P(t)=i=0∑nPiBi,n(t),t∈[0,1]
B i , n ( t ) = C n i t i ( 1 − t ) n − i = n ! i ! ( n − i ) ! t i ( 1 − t ) n − i ,【 i = 0 , 1 , . . . , n 】 B_{i,n}(t)=C_n^it^i(1-t)^{n-i}=\frac{n!}{i!(n-i)!}t^i(1-t)^{n-i},【i=0,1,...,n】 Bi,n(t)=Cniti(1−t)n−i=i!(n−i)!n!ti(1−t)n−i,【i=0,1,...,n】
三阶贝塞尔曲线求插值(Slerp)
在熟悉了贝塞尔曲线的相关概念之后,我们来了解一下它的具体应用。通常它的应用场景是:
已知两个端点和两个控制点的情况下,根据 动画进度向量 P x P_x Px 求 t t t,再由 t t t 确认的曲线求 P y P_y Py。
回顾一下三阶贝塞尔曲线公式:
P = ( 1 − t ) 3 P 0 + 3 t ( 1 − t ) 2 P 1 + 3 t 2 ( 1 − t ) P 2 + t 3 P 3 P=(1-t)^3P_0+3t(1-t)^2P_1+3t^2(1-t)P_2+t^3P_3 P=(1−t)3P0+3t(1−t)2P1+3t2(1−t)P2+t3P3
公式中的 P 0 P_0 P0、 P 1 P_1 P1 等都是二维向量,由两个一维向量 P x P_x Px 和 P y P_y Py 构成。而我们根据 t t t 求 P P P,本质上是根据 t t t 来求一个坐标 ( x , y ) (x,y) (x,y)。因此,可将公式拆解在两个一维向量上:
y = ( 1 − t ) 3 P y 0 + 3 t ( 1 − t ) 2 P y 1 + 3 t 2 ( 1 − t ) P y 2 + t 3 P y 3 y=(1-t)^3P_{y0}+3t(1-t)^2P_{y1}+3t^2(1-t)P_{y2}+t^3P_{y3} y=(1−t)3Py0+3t(1−t)2Py1+3t2(1−t)Py2+t3Py3
x = ( 1 − t ) 3 P x 0 + 3 t ( 1 − t ) 2 P x 1 + 3 t 2 ( 1 − t ) P x 2 + t 3 P x 3 x=(1-t)^3P_{x0}+3t(1-t)^2P_{x1}+3t^2(1-t)P_{x2}+t^3P_{x3} x=(1−t)3Px0+3t(1−t)2Px1+3t2(1−t)Px2+t3Px3
而由于我们在处理动画时通常起点 P 0 P_0 P0 和终点 P 3 P_3 P3 都是可以确定的【 P 0 ( 0 , 0 ) 、 P 3 ( 1 , 1 ) P_0(0,0)、P_3(1,1) P0(0,0)、P3(1,1)】,因此上述公式可以化简为(以 x x x 举例, y y y 同理):
x = 3 t ( 1 − t ) 2 P y 1 + 3 t 2 ( 1 − t ) P y 2 + t 3 x=3t(1-t)^2P_{y1}+3t^2(1-t)P_{y2}+t^3 x=3t(1−t)2Py1+3t2(1−t)Py2+t3
完全展开:
= 3 P y 1 t − 6 P y 1 t 2 + 3 P y 1 t 3 + 3 P y 2 t 2 − 3 P y 2 t 3 + t 3 =3P_{y1}t-6P_{y1}t^2+3P_{y1}t^3+3P_{y2}t^2-3P_{y2}t^3+t^3 =3Py1t−6Py1t2+3Py1t3+3Py2t2−3Py2t3+t3
提取三次方系数 a a a:
a = 3 P y 1 − 3 P y 2 + 1 a=3P_{y1}-3P_{y2}+1 a=3Py1−3Py2+1
提取二次方系数 b b b:
b = 3 P y 2 − 6 P y 1 b=3P_{y2}-6P_{y1} b=3Py2−6Py1
提取一次方系数 c c c:
c = 3 P y 1 c=3P_{y1} c=3Py1
将公式简化为:
x = a t 3 + b t 2 + c t x=at^3+bt^2+ct x=at3+bt2+ct
移动 x x x,将公式变为一元三次方程:
a t 3 + b t 2 + c t − x = 0 at^3+bt^2+ct-x=0 at3+bt2+ct−x=0
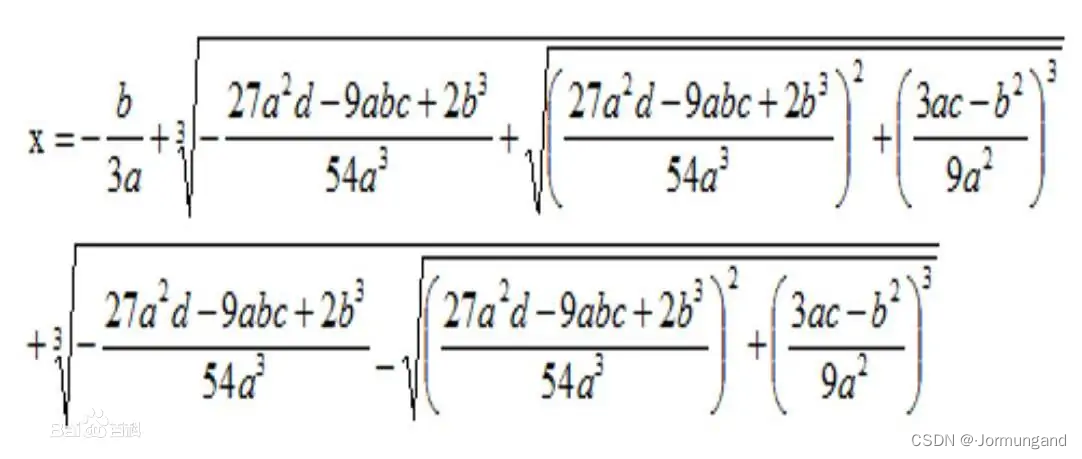
此时,就可以通过卡尔丹公式根据 x x x 求出来 t t t。之后根据 t t t 可以求得 y y y:
y = ( 1 − t ) 3 P y 0 + 3 t ( 1 − t ) 2 P y 1 + 3 t 2 ( 1 − t ) P y 2 + t 3 P y 3 y=(1-t)^3P_{y0}+3t(1-t)^2P_{y1}+3t^2(1-t)P_{y2}+t^3P_{y3} y=(1−t)3Py0+3t(1−t)2Py1+3t2(1−t)Py2+t3Py3
代码实现:
double SlerpWithCubicBazier(double pX1, double pY1, double pX2, double pY2, double x) {
// x为动画进度,并不是t,t只是一个参数,先根据x求t,再由t确认的曲线上求y
// 参考 https://github.com/gre/bezier-easing/blob/master/src/index.js
double t = 0.0;
if (x <= 0.0) {
t = 0.0;
}else if (x >= 1.0) {
t = 1.0;
}else {
// x = (1-t)^3*P0x + 3*(1-t)^2*t*P1x + 3*(1-t)*t^2*P2x + t^3*P3x
// 提取系数:
double a = 0.0 + 3 * pX1 - 3 * pX2 + 1.0;
double b = 3 * 0.0 - 6 * pX1 + 3 * pX2;
double c = 0.0 + 3 * pX1;
// 公式可化简为: x = at^3 + bt^2 + ct
// 转换为基于 t 的一元三次方程:at^3 + bt^2 + ct - x = 0
double d = 0 - x;
// 那么就可以通过 SolveCubic 函数根据a、b、c、d四个系数来求解一元三次方程的一个实根
// 可能该一元三次方程的根不止一个,但不重要,即使有多个根我们也只需要其中之一,且要求这个根是在 0~1 之间的,符合 t 的取值范围要求,如果没有根/没有符合要求的根我们会返回 -1
double tTemp = SolveCubic(a, b, c, d);
if (tTemp == -1) {
return -1;
}
t = tTemp;
}
// Gy(t) = P0*(1-t)^3 + 3*P1*t*(1-t)^2 + 3*P2*t^2*(1-t) + P3*t^3 t[0,1]
// PY0=0.0 PY3=1.0
double coef1 = 0.0 * (1.0 - t) * (1.0 - t) * (1.0 - t);
double coef2 = pY1 * 3 * t * (1.0 - t) * (1.0 - t);
double coef3 = pY2 * 3 * t * t * (1.0 - t);
double coef4 = 1.0 * t * t * t;
double gt = coef1 + coef2 + coef3 + coef4;
return gt;
}
SolveCubic 函数的具体实现如下,值得注意的是,并不能简单的将此函数的作用等同于求解一元三次方程,本函数的本质作用是贝塞尔曲线中根据 x 求出 t,这两者有什么区别呢?举个具体的例子,下面的代码第 5 行有这样的语句:
if (d == 0) return 0;
- 在 d=0 的情况下,普通一元三次方程是可以继续求解的;
- 但是在
SlerpWithCubicBazier调用SolveCubic时,是以 d = 0 − x d=0-x d=0−x 的形式传值的, d = 0 d=0 d=0 代表 x = 0 x=0 x=0,此时曲线位于起点,t的值可以确定,无需通过解方程获得,即 t = 0 t=0 t=0。
double FCPSolveCubic(double a, double b, double c, double d) {
/* a=0 视为一元二次方程式 */
if (a == 0) return FCPSolveQuadratic(b, c, d);
/* d=0表明x=0,则t=0*/
if (d == 0) return 0;
/* 将三次方的系数变为1,方便后续判别式中的计算,即不用考虑 a^2 这一项了 */
b /= a;
c /= a;
d /= a;
/* q和r对应求根公式中的p和q,dis即是求根公式的判别式 △ */
double q = (3.0 * c - FCPSquared(b)) / 9.0;
double r = (-27.0 * d + b * (9.0 * c - 2.0 * FCPSquared(b))) / 54.0;
double disc = FCPCubed(q) + FCPSquared(r);
double term1 = b / 3.0;
if (disc > 0) {
/* 运用卡尔丹公式求得一个实根 */
double s = r + sqrtf(disc);
s = (s < 0) ? - FCPCubicRoot(-s) : FCPCubicRoot(s);
double t = r - sqrtf(disc);
t = (t < 0) ? - FCPCubicRoot(-t) : FCPCubicRoot(t);
double result = -term1 + s + t;
if (result >= 0 && result <= 1) return result;
} else if (disc == 0) {
double r13 = (r < 0) ? - FCPCubicRoot(-r) : FCPCubicRoot(r);
double result = -term1 + 2.0 * r13;
if (result >= 0 && result <= 1) return result;
result = -(r13 + term1);
if (result >= 0 && result <= 1) return result;
} else {
q = -q;
double dum1 = q * q * q;
dum1 = acosf(r / sqrtf(dum1));
double r13 = 2.0 * sqrtf(q);
double result = -term1 + r13 * cos(dum1 / 3.0);
if (result >= 0 && result <= 1) return result;
result = -term1 + r13 * cos((dum1 + 2.0 * M_PI) / 3.0);
if (result >= 0 && result <= 1) return result;
result = -term1 + r13 * cos((dum1 + 4.0 * M_PI) / 3.0);
if (result >= 0 && result <= 1) return result;
}
return -1;
}
上面代码中用到的知识:
- 一元三次方程判别式:
△ = q 2 4 + p 2 27 △ = \frac{q^2}{4} + \frac{p^2}{27} △=4q2+27p2
- 标准型方程中卡尔丹公式的一个实根: