https://zhuanlan.zhihu.com/p/520048433
本文基于以下软硬件假定:
架构:AARCH6464
软件:ATF V2.5
1 BL2启动流程
Bl2的启动流程与bl1类似,主要区别是bl2的初始化流程比bl1更简单,但其可能需要加载更多的镜像,如bl31、bl32和bl33。由于bl2可以运行于el3或s-el1,它们的入口函数和处理流程都有所区别,为了简化分析我们选取比较常见的s-el1方式,以下为其总体执行流程:
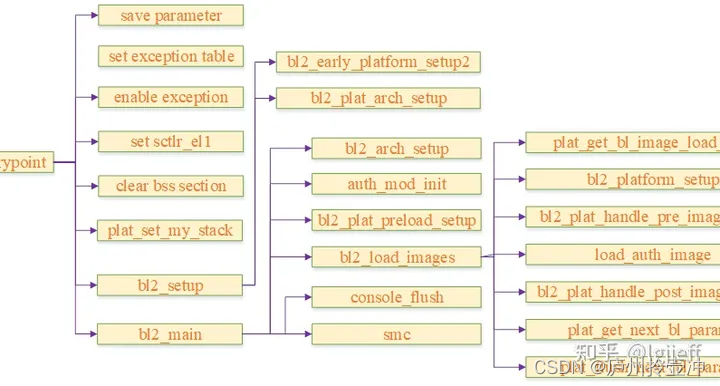
下面将以上流程分为bl2基础初始化、bl2参数设置、bl2镜像加载和下一阶段镜像跳转这几部分,并分别介绍
2 bl2基础初始化
2.1 保存参数
其代码流程如下:
mov x20, x0
mov x21, x1
mov x22, x2
mov x23, x3
bl1虽然定义了x0 – x7寄存器用于向bl2传递参数,但bl2实际使用的只有x0 - x3四个寄存器,因此其实际传参的数量不能超过四个。在armv8过程调用中,x0 – 18是caller saved寄存器,x19 – x30是callee saved寄存器。所谓caller saved寄存器就是在子函数过程调用中,若这些寄存器的内容需要保存,则由函数调用方来保存它们,子程序可以随意使用这些寄存器,而无须在调用完成后恢复它们的值。而callee寄存器则相反,子程序若需要使用这些寄存器,则必须要先保存它们的原始值,然后调用完成后恢复它们。
由于bl1的参数位于caller寄存器中,因此需要将其保存到callee寄存器中,以确保后面的子程序调用不会篡改这些寄存器的值。
2.2 异常设置
其代码流程如下:
adr x0, early_exceptions
msr vbar_el1, x0
该流程用于设置el1的异常向量表基地址,其定义位于common/aarch64/early_exceptions.S中。从其定义可知,bl2捕获到异常后不会对其做实际处理,而只是打印出异常相关的信息,然后将系统设置为panic状态。
异常向量表设置完成后,bl2将使能serror和external abort异常,显然这些异常一般意味着系统出现了像未定义指令、空指针等严重错误,因此需要捕获并将将系统设置为安全状态。其代码流程如下:
msr daifclr, #DAIF_ABT_BIT
2.3 设置sctlr_el1寄存器
该流程主要用于使能指令cache、对齐检查和栈对齐检查特性,其代码流程如下:
mov x1, #(SCTLR_I_BIT | SCTLR_A_BIT | SCTLR_SA_BIT)
mrs x0, sctlr_el1
orr x0, x0, x1
bic x0, x0, #SCTLR_DSSBS_BIT
msr sctlr_el1, x0
2.4 C运行时环境准备
C运行时环境需要清空bss段内存,并为其设置运行时栈,其流程与bl1相同,可参考bl1启动流程
3 Bl2平台设置
它主要执行参数处理和平台初始化流程,后面的分析我们仍然以qemu平台为例。参数处理流程如下(plat/qemu/common/qemu_bl2_setup.c):
meminfo_t *mem_layout = (void *)arg1; (1)
qemu_console_init(); (2)
bl2_tzram_layout = *mem_layout; (3)
plat_qemu_io_setup(); (4)
(1)从x1参数中获取bl2的内存layout信息
(2)初始化串口控制台
(3)设置bl2的内存layout信息
(4)初始化qemu的storage加载驱动
qemu平台初始化主要是为bl2内存建立MMU页表,并启动MMU和dcache,其主要目的是加快后面镜像加载的速度。其代码如下:
QEMU_CONFIGURE_BL2_MMU(bl2_tzram_layout.total_base,
bl2_tzram_layout.total_size,
BL_CODE_BASE, BL_CODE_END,
BL_RO_DATA_BASE, BL_RO_DATA_END,
BL_COHERENT_RAM_BASE, BL_COHERENT_RAM_END);
4 Bl2镜像加载
4.1 镜像加载前流程
(1)bl2_arch_setup
aarch64架构下使能fp和simd寄存器访问权限,其代码如下:
write_cpacr(CPACR_EL1_FPEN(CPACR_EL1_FP_TRAP_NONE));
(2)auth_mod_init
该流程用于初始化secure boot模块,与bl1中相同
4.2 镜像加载流程
Bl2需要加载的镜像信息由平台定义,对于qemu平台其定义位于plat/qemu/common/qemu_bl2_mem_params_desc.c中,以下代码选取了其在aarch64架构下只加载bl31和bl33的典型配置:
static bl_mem_params_node_t bl2_mem_params_descs[] = {
#ifdef __aarch64__
{
.image_id = BL31_IMAGE_ID,
SET_STATIC_PARAM_HEAD(ep_info, PARAM_EP, VERSION_2,
entry_point_info_t,
SECURE | EXECUTABLE | EP_FIRST_EXE),
.ep_info.pc = BL31_BASE,
.ep_info.spsr = SPSR_64(MODE_EL3, MODE_SP_ELX,
DISABLE_ALL_EXCEPTIONS),
# if DEBUG
.ep_info.args.arg1 = QEMU_BL31_PLAT_PARAM_VAL,
# endif
SET_STATIC_PARAM_HEAD(image_info, PARAM_EP, VERSION_2, image_info_t,
IMAGE_ATTRIB_PLAT_SETUP),
.image_info.image_base = BL31_BASE,
.image_info.image_max_size = BL31_LIMIT - BL31_BASE,
# ifdef QEMU_LOAD_BL32
.next_handoff_image_id = BL32_IMAGE_ID,
# else
.next_handoff_image_id = BL33_IMAGE_ID,
# endif
},
#endif /* __aarch64__ */
{
.image_id = BL33_IMAGE_ID,
SET_STATIC_PARAM_HEAD(ep_info, PARAM_EP, VERSION_2,
entry_point_info_t, NON_SECURE | EXECUTABLE),
# ifdef PRELOADED_BL33_BASE
.ep_info.pc = PRELOADED_BL33_BASE,
SET_STATIC_PARAM_HEAD(image_info, PARAM_EP, VERSION_2, image_info_t,
IMAGE_ATTRIB_SKIP_LOADING),
# else /* PRELOADED_BL33_BASE */
.ep_info.pc = NS_IMAGE_OFFSET,
SET_STATIC_PARAM_HEAD(image_info, PARAM_EP, VERSION_2, image_info_t,
0),
.image_info.image_base = NS_IMAGE_OFFSET,
.image_info.image_max_size = NS_IMAGE_MAX_SIZE,
# endif /* !PRELOADED_BL33_BASE */
.next_handoff_image_id = INVALID_IMAGE_ID,
}
};
该结构与bl1的镜像描述结构体比较类似,只是多了下一阶段镜像id,以及加载参数链表节点信息。该结构体定义完成后需要通过以下接口注册到系统中:
REGISTER_BL_IMAGE_DESCS(bl2_mem_params_descs)
在启动阶段,可通过plat_get_bl_image_load_info获取以上镜像加载信息,此后启动代码将遍历这些接在信息,并分别执行以下流程分别加载和处理这些镜像
(1)bl2_platform_setup
该函数用于bl2平台相关的设置,如security设置,timer设置以及dtb设置等
(2)bl2_plat_handle_pre_image_load
镜像加载前平台可以执行一些其特定的流程
(3)load_auth_image
该接口用于实际的镜像加载流程,其与bl1的镜像加载流程完全一样
(4)bl2_plat_handle_post_image_load
该接口用于设置镜像加载相关信息,qemu平台代码如下(plat/qemu/common/qemu_bl2_setup.c):
static int qemu_bl2_handle_post_image_load(unsigned int image_id)
{
int err = 0;
bl_mem_params_node_t *bl_mem_params = get_bl_mem_params_node(image_id);
…
switch (image_id) {
case BL32_IMAGE_ID:
… (a)
case BL33_IMAGE_ID:
#if ARM_LINUX_KERNEL_AS_BL33
bl_mem_params->ep_info.args.arg0 =
(u_register_t)ARM_PRELOADED_DTB_BASE;
bl_mem_params->ep_info.args.arg1 = 0U;
bl_mem_params->ep_info.args.arg2 = 0U;
bl_mem_params->ep_info.args.arg3 = 0U; (b)
#else
bl_mem_params->ep_info.args.arg0 = 0xffff & read_mpidr(); (c)
#endif
bl_mem_params->ep_info.spsr = qemu_get_spsr_for_bl33_entry(); (d)
break;
default:
break;
}
return err;
}
a bl32用于加载trust os,在启动流程中不是必须的,此处暂时不讨论
b 若由bl2直接启动linux,则设置linux的启动参数。我们知道armv8架构的linux启动参数都是通过dtb传递的,因 此这里将dtb地址设置为其启动参数
c 对于其它类型的bl33(如uboot),则将当前处理器的affinity信息作为其启动参数
d 设置bl33的spsr
4.2 参数设置流程
bl2可能会加载bl31、bl32、bl33镜像,因此其需要将这些被加载镜像的信息传给下一阶段。Bl2通过链表方式来组织这些参数,其中每一级镜像是链表的一个节点,其具体结构如下图所示:

回顾一下第一篇总体流程中<启动阶段>部分,bl2若运行在S-EL1下,则镜像加载完成并准备好参数后,需要通过smc异常再次进入bl1,由bl1的smc处理函数来执行实际的镜像切换流程。在执行smc命令之前,我们需要为其设置好参数,上面的bl_params->head->ep_info会设置为smc的调用参数,同时bl_params还需要被设置为第一级镜像的arg0参数,即在启动第一级镜像(如bl31)时,通过其x0寄存器传给它的也是bl_params指针,从而使bl31可以继续启动其后的镜像。
由于bl_params位于sram内存中,而bl2开启了dcache,因此在跳转到smc之前,需要将这部分数据从cache刷到sram中。最后我们就可以调用下面的smc指令返回bl1le :
smc(BL1_SMC_RUN_IMAGE, (unsigned long)next_bl_ep_info, 0, 0, 0, 0, 0, 0);
5 bl1代理运行下一级镜像
bl1的smc处理流程如下:
vector_entry SynchronousExceptionA64
smc_handler64
其中smc_handler64会判断bl2传入的命令,若命令为BL1_SMC_RUN_IMAGE,则从x1寄存器中获取下一阶段镜像的ep_info,执行上下文切换的准备,并最终跳转到下一阶段镜像的入口执行。其代码流程如下:
func smc_handler64
mov x30, #BL1_SMC_RUN_IMAGE
cmp x30, x0
b.ne smc_handler (1)
mrs x30, scr_el3
tst x30, #SCR_NS_BIT (2)
b.ne unexpected_sync_exception
ldr x30, [sp, #CTX_EL3STATE_OFFSET + CTX_RUNTIME_SP]
msr spsel, #MODE_SP_EL0
mov sp, x30 (3)
mov x20, x1 (4)
mov x0, x20
bl bl1_print_next_bl_ep_info (5)
ldp x0, x1, [x20, #ENTRY_POINT_INFO_PC_OFFSET]
msr elr_el3, x0
msr spsr_el3, x1 (6)
ubfx x0, x1, #MODE_EL_SHIFT, #2
cmp x0, #MODE_EL3 (7)
b.ne unexpected_sync_exception
…
mov x0, x20
bl bl1_plat_prepare_exit (8)
ldp x6, x7, [x20, #(ENTRY_POINT_INFO_ARGS_OFFSET + 0x30)]
ldp x4, x5, [x20, #(ENTRY_POINT_INFO_ARGS_OFFSET + 0x20)]
ldp x2, x3, [x20, #(ENTRY_POINT_INFO_ARGS_OFFSET + 0x10)]
ldp x0, x1, [x20, #(ENTRY_POINT_INFO_ARGS_OFFSET + 0x0)] (9)
exception_return (10)
endfunc smc_handler64
(1)判断通过x0寄存器传入的smc命令是否为BL1_SMC_RUN_IMAGE,若不是则执行smc_handler,否则继续执行下面的镜像跳转流程
(2)判断scr_el3的secure位是否为0。该值表示EL0 – EL2等级的secure状态,因此实际指的是smc跳转之前的执行状态。所以该值为0就表示smc跳转前bl2执行在secure状态,否则表示bl2执行在non secure状态。在atf架构中,为了系统的安全性bl2必须要运行在secure状态(因为通常在bl2需要执行一些secure相关的设置,如tzasc,tzma,tzpc等)
(3)从sp_el3栈中获取先前el3_exit流程中保存的运行时栈的值,将其恢复回sp_el0,并将栈指针切换回sp_el0
(4)获取smc指令通过x1寄存器传入的next_bl_ep_info参数
(5)打印参数信息
(6)从next_bl_ep_info参数中获取bl1的入口地址和spsr寄存器值,分别将其设置到elr_el3和spsr_el3,为跳转到下一阶段镜像做准备
(7)判断下一阶段镜像是否运行于el3,若不是则出错
(8)平台相关的跳转前自定义流程,该函数默认什么都不做
(9)通过x0 – x7设置跳转参数,在bl2中只向arg0设置了bl_params指针这一个参数,因此bl2传给bl31的参数为描述镜像信息的bl_params指针
(10)通过eret跳转到下一阶段镜像入口函数处执行