这篇文章是LOAM代码系列的最后一篇,分析一下代码的第四个节点transformMaintenance。打开代码一看,只有200+行,是不是很开心!
先拿出节点图来回顾一下节点间的关系:

可以看到该节点订阅了laserOdometry节点发布的/laser_odom_to_init消息(Lidar里程计估计位姿到初始坐标系的变换)以及laserMapping节点发布的/aft_mapped_to_init消息(laserMapping节点优化后的位姿到初始坐标系的变换),经过节点处理发布/integrated_to_init消息。
所以要搞清楚这个transformMaintenance节点到底是干嘛的,我们首先需要弄清楚它所发布的消息到底是什么含义。
这个节点的主函数非常简单:
int main(int argc, char** argv)
{
ros::init(argc, argv, "transformMaintenance");
ros::NodeHandle nh;
ros::Subscriber subLaserOdometry = nh.subscribe<nav_msgs::Odometry>
("/laser_odom_to_init", 5, laserOdometryHandler);
ros::Subscriber subOdomAftMapped = nh.subscribe<nav_msgs::Odometry>
("/aft_mapped_to_init", 5, odomAftMappedHandler);
ros::Publisher pubLaserOdometry2 = nh.advertise<nav_msgs::Odometry> ("/integrated_to_init", 5);
pubLaserOdometry2Pointer = &pubLaserOdometry2;
laserOdometry2.header.frame_id = "/camera_init";
laserOdometry2.child_frame_id = "/camera";
tf::TransformBroadcaster tfBroadcaster2;
tfBroadcaster2Pointer = &tfBroadcaster2;
laserOdometryTrans2.frame_id_ = "/camera_init";
laserOdometryTrans2.child_frame_id_ = "/camera";
ros::spin();
return 0;
}
可以看出/integrated_to_init消息是由发布器pubLaserOdometry2发布的,实际上就是由发布器pubLaserOdometry2Pointer发布的。我们顺藤摸瓜,找到pubLaserOdometry2Pointer的发布函数,发现每次接收到/laser_odom_to_init消息并调用回调函数laserOdometryHandler时,就发布一次该消息。
void laserOdometryHandler(const nav_msgs::Odometry::ConstPtr& laserOdometry)
{
double roll, pitch, yaw;
geometry_msgs::Quaternion geoQuat = laserOdometry->pose.pose.orientation;
tf::Matrix3x3(tf::Quaternion(geoQuat.z, -geoQuat.x, -geoQuat.y, geoQuat.w)).getRPY(roll, pitch, yaw);
transformSum[0] = -pitch;
transformSum[1] = -yaw;
transformSum[2] = roll;
transformSum[3] = laserOdometry->pose.pose.position.x;
transformSum[4] = laserOdometry->pose.pose.position.y;
transformSum[5] = laserOdometry->pose.pose.position.z;
// Lidar里程计估计位姿转到世界坐标系下
transformAssociateToMap();
// Lidar在世界坐标系下的姿态
geoQuat = tf::createQuaternionMsgFromRollPitchYaw
(transformMapped[2], -transformMapped[0], -transformMapped[1]);
// 发布Lidar在世界坐标系下的位姿
laserOdometry2.header.stamp = laserOdometry->header.stamp;
laserOdometry2.pose.pose.orientation.x = -geoQuat.y;
laserOdometry2.pose.pose.orientation.y = -geoQuat.z;
laserOdometry2.pose.pose.orientation.z = geoQuat.x;
laserOdometry2.pose.pose.orientation.w = geoQuat.w;
laserOdometry2.pose.pose.position.x = transformMapped[3];
laserOdometry2.pose.pose.position.y = transformMapped[4];
laserOdometry2.pose.pose.position.z = transformMapped[5];
pubLaserOdometry2Pointer->publish(laserOdometry2);
laserOdometryTrans2.stamp_ = laserOdometry->header.stamp;
laserOdometryTrans2.setRotation(tf::Quaternion(-geoQuat.y, -geoQuat.z, geoQuat.x, geoQuat.w));
laserOdometryTrans2.setOrigin(tf::Vector3(transformMapped[3], transformMapped[4], transformMapped[5]));
tfBroadcaster2Pointer->sendTransform(laserOdometryTrans2);
}
通过该回调函数可以看出,他完成的就是一个简单则坐标转换,得到经过laserMapping优化后的Lidar位姿。
但是!!!这里还是有个小坑的。正如我们刚才所说的,这个节点接收了两个消息,分别是laserOdometry节点和laserMapping节点发布的,而这两个节点发布的频率不同啊!!
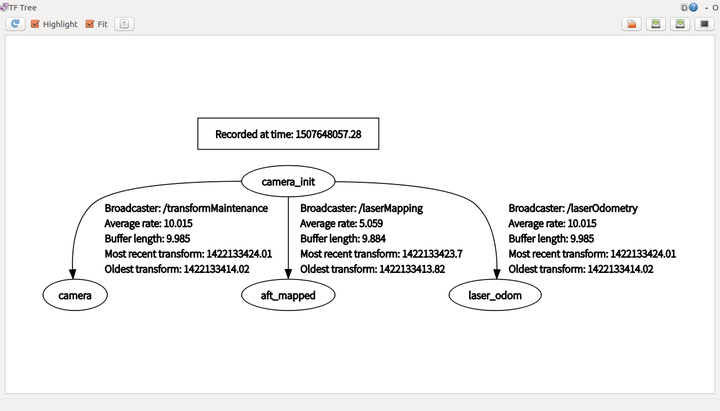
看图可以知道,论文中说1Hz和10Hz,实际是5Hz和10Hz。所以这个/integrated_to_init消息到底是什么?实际它就是融合后的Lidar轨迹,说白了就是:有优化结果了就拿这一时刻的优化结果作为轨迹,没有优化结果只有里程计结果了,就直接拿里程计结果作为这一时刻的轨迹。
这部分真的很简单,剩下部分的代码也都比较直观了,相信大家都能读懂。
到此,LOAM的四个节点就都介绍完了,相信大家跟我一样,对这个方法都有了更为深刻的认识,也希望大家能多多探讨交流,思想的交流总会碰撞出意想不到的火花!