目录
4. 安装好VMware Tools后主机和虚拟机依旧无法互传
一、安装VMware 16.2.4
官网链接
VMware 中国 - 交付面向企业的数字化基础 | CN![]() https://www.vmware.com/cn.html
https://www.vmware.com/cn.html
安装过程
- 双击安装

- 修改安装位置

- 不加入用户体验计划

- 创建桌面快捷方式

- 添加密钥
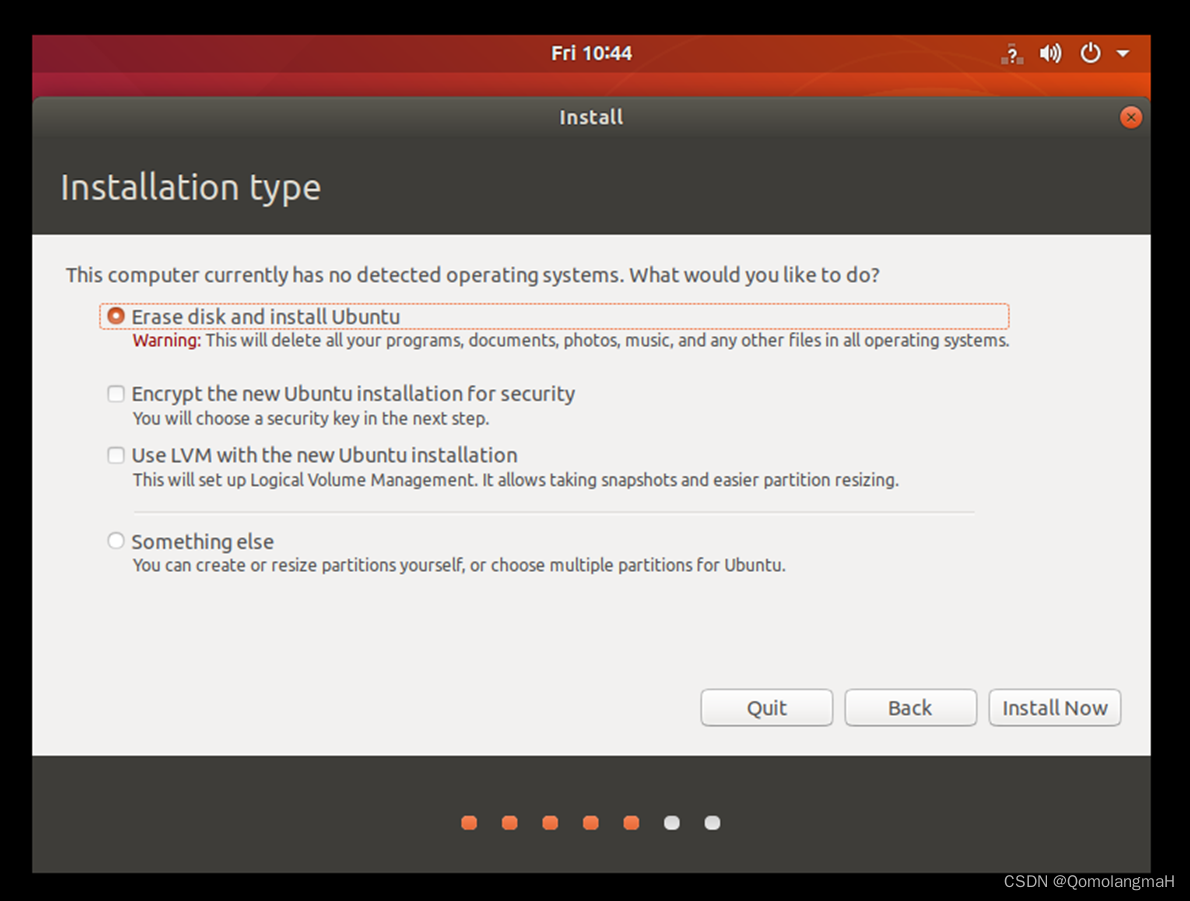
二、安装Ubuntu18.04
Ubuntu 18.04镜像下载
Index of /releases![]() http://ubuntu.mirrors.pair.com/releases/
http://ubuntu.mirrors.pair.com/releases/
使用镜像

开启虚拟机
注意全程操作要慢,否则卡死只能从头开始……




接下来注册用户名及密码、然后登录,这里不做展示
(忘截图了……)
三、遇到的问题汇总
1. 蓝屏重启问题
安装VMware 15.5.0版本刚开启虚拟机便蓝屏重启,经查询为版本不匹配,最终安装了16.2.4版本。
2. Intel VT-x处于禁用状态
经咨询联想客服知:依次点击开始→设置→更新和安全→恢复→高级启动→立即重新启动→疑难解答→高级选项 UEFI固件设置→重启,进入 BIOS界面,打开Intel(R) Virtualizaton Technology,F10保存退出。
3. 开启虚拟机创建账号时卡死
该问题无解,进行每步操作时需要慢慢等待,不能操之过急,否则只能从头再来……
4. 安装好VMware Tools后主机和虚拟机依旧无法互传
该问题亦无解,通过csdn查询到多种修改方法,操作后均无效,最后只能通过共享文件夹的方式实现文件互传:如图所示,在主机创建share文件夹,开启共享,可在虚拟机中如下位置找到share文件夹,从而实现文件互传。


5. 与主机共享同一网络:
依次点击VMware界面上的,虚拟机→设置→网络适配器,将网络连接下桥接模式改为NAT模式
6. 虚拟机下载中文输入法
依次点击右上角→用户名→Account settings→Region & Language→Input Sources,下载中文拼音输入法,下载成功后可通过win+空格键进行输入法切换。
四、安装ROS及测试
换源
国内源pass,中科大源pass,阿里源pass……千挑万选后清华源终于成功了!
国内源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'清华源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'ROS设置钥匙:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654准备操作
- 更新软件包列表,以获取最新的可用软件包信息。
sudo apt update- 使用APT包管理器安装ROS Melodic的完整桌面版本。这将下载和安装ROS Melodic及其所有依赖项。
sudo apt install ros-melodic-desktop-full- 设置环境
echo "source /opt/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc安装rosinstall
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential-
rosdep工具:在系统上安装ROS软件包的依赖项。 -
osinstall和rosinstall-generator工具:用于管理ROS工作空间中的软件包。 -
wstool工具:用于从多个代码仓库中下载ROS软件包。 -
build-essential:构建工具,包括gcc和g++编译器,make构建工具等。这些工具通常用于编译和构建ROS软件包。
测试——遛王八
安装turtlesim软件包
turtlesim是一个提供了一个环境,可以在里面控制一个简单的乌龟进行移动和绘图的ROS节点。
sudo apt-get install ros-melodic-turtlesim
启动ROS
roscore
启动turtlesim节点
打开另外一个终端输入
rosrun turtlesim turtlesim_node创建了一个简单的乌龟模拟器,可以在其中控制乌龟的移动和绘图。
启动turtle_teleop_key节点
再打开一个终端输入
rosrun turtlesim turtle_teleop_key该节点会监听键盘输入并将命令发送给turtlesim节点,以通过按键控制乌龟的移动。
遛王八
