1.欧拉角
即是姿态角yaw,pitch,roll
2.欧拉角法
一个直角坐标系相对于另一个直角坐标系的方位关系,可通过三个依次转动来描述,每次旋转所绕 的坐标轴与前后旋转轴正交.欧拉角是一种用于描述两个坐标系之间相对姿态的经典方法,尤其是用于描述载体坐标系相对于当地导航坐标系的运动.
3.姿态矩阵
使用欧拉角表示姿态矩阵
4.姿态角微分方程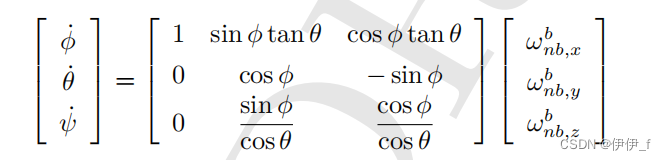
5.缺点
当俯仰角为 ±90◦ 时,欧拉角变换存在奇异值,此时无法区分横滚角和航向角。因此,欧拉角法不能用于全姿态导航应用
6.欧拉角转换姿态矩阵Python实现
from scipy.spatial.transform import Rotation as R
r=R.from_euler('zyx',[0.7854,0.1,0]) #欧拉角->旋转矩阵
m4=r.as_matrix() #姿态矩阵 =m3.dot(m2).dot(m1)
print(m4) #输出旋转矩阵
7.知道方向余弦矩阵求欧拉角