佐思汽研发布了**《2022年智能汽车E/E架构研究报告》**。
下一代电子电气架构关键技术要素
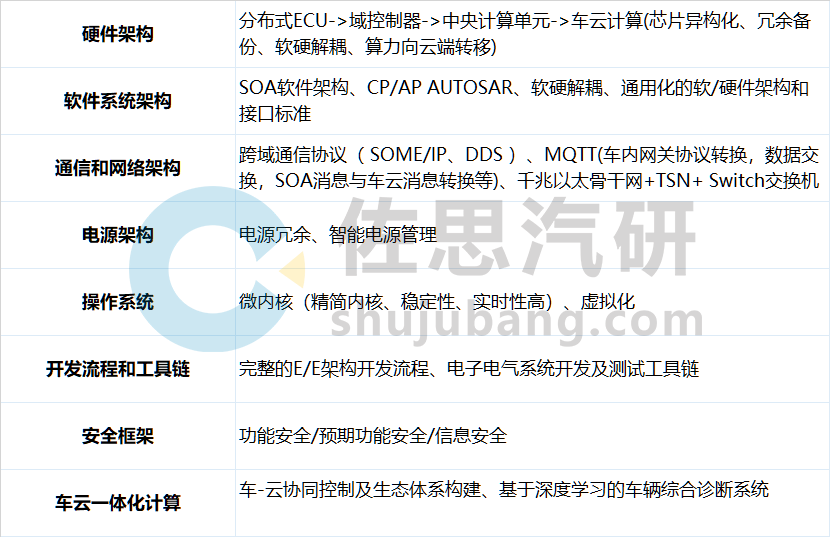
下一代电子电气架构定义包括高算力HPC,实现车-云架构一体化;高带宽、高速主干网络,实现域间协同计算;SOA架构,软硬解耦,通用化的软/硬件架构和接口标准;完整的开发工具链,采用V模型的开发流程;支持L4级高级辅助驾驶;智能低压电源架构等等。
建立下一代E/E架构的关键技术
来源:《2022年智能汽车E/E架构研究报告》
面向下一代电子电气架构开发,我们总结了14大关键技术要点,以下列举分析了部分E/E架构的关键技术进展:
E/E架构关键技术:完整的开发工具链,先进的架构标准,采用基于V模型的电子电气架构开发流程
国际上暂时没有专门针对汽车E/E架构的全球性标准,可以参考ISO 26262《Road Vehicles-Functional Safety》 、ISO/SAE 21434《Road Vehicles—Cybersecurity Engineering(道路车辆-信息安全工程)》、GB/T 34590 《道路车辆功能安全》等标准作为汽车EEA设计与优化参考依据。
在国内,2021年4月,在电动汽车产业技术创新战略联盟三届二次理事会上审议成立了汽车电子电气架构工作组,目前已有包括整车厂、架构方案商、软件公司、通信公司、测试工具及服务等不同领域超过35家企业专家参与。
目前国内汽车E/E架构标准制定方向推进十分迅速,已有多项团体或组织标准推进立项或完成发布,包括:
-
《智能网联汽车用数据分发服务(DDS)测试方法》
-
《汽车以太网交换机设备安全技术要求》
-
《车载时间敏感网络中间件技术要求》
-
《软件定义汽车服务API参考规范2.0》
-
《星闪Release 1.0 11项团体标准》
-
《车载专用无线短距传输系统技术要求和试验方法》
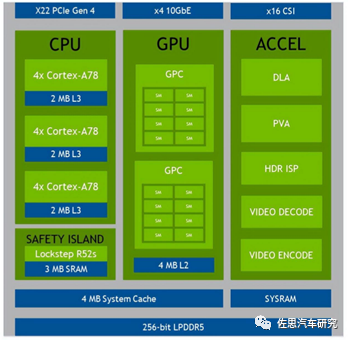
E/E架构关键技术:算力向中央集中、向云端集中,实现车-云架构一体化
车辆正朝着类似人脑+中枢神经+末端神经的方向发展。目前国内外半导体厂商,都在开发设计面向智能汽车的拥有强大计算能力的车载计算中心芯片,采用多核并行的CPU、图形和图像处理的GPU、AI计算加速器,典型如英伟达ORIN,已同时兼具座舱、自动驾驶、AI等多任务并行计算能力。
来源:网络
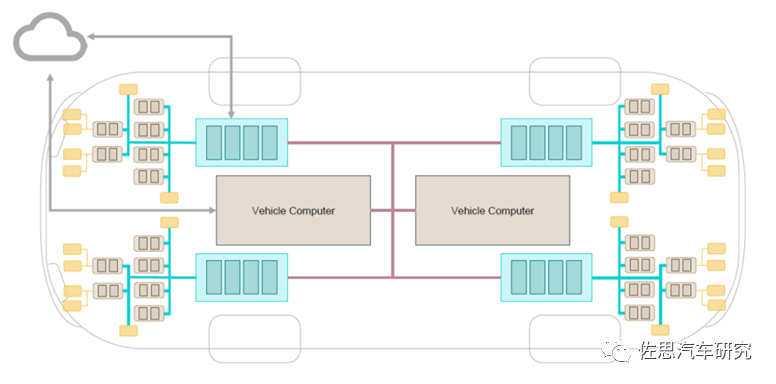
在未来,随着车载高速网络技术和5G技术的成熟,最终向基于中央计算机的车辆集中式电子电气架构,以及车-云协同控制方向发展,算力向中央集中、向云端集中,避免车辆终端算力无限扩张。
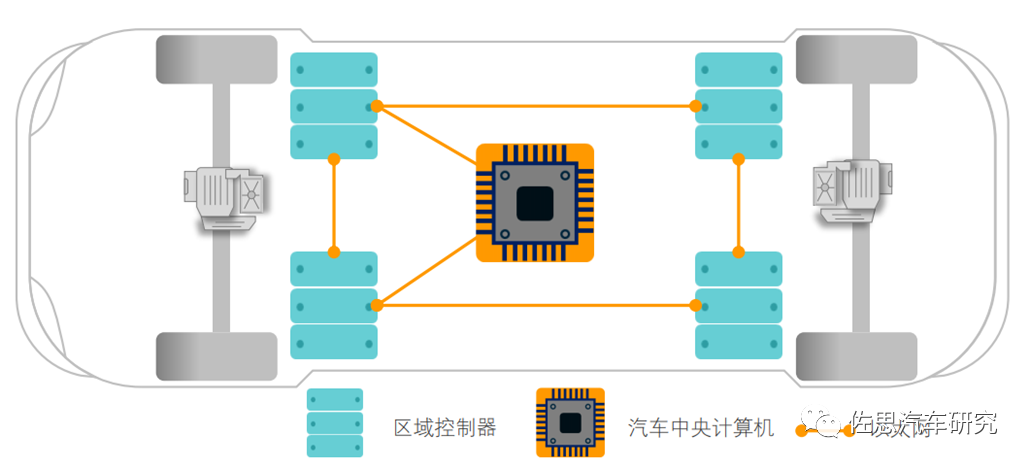
典型的中央+车云协同计算架构
来源:网络
E/E架构关键技术:CP+AP AUTOSAR,SOA软件,通用化的软/硬件架构和接口标准
车辆软件架构向CP+AP AUTOSAR的混合软件架构发展,CP AUTOSAR主要面向有高可靠性、高实时性要求的车控域,AP AUTOSAR主要面向进行海量数据并行处理的智驾域和娱乐域,同时根据接口功能特性进行标准化设计,整合接口设计,形成通用接口平台。
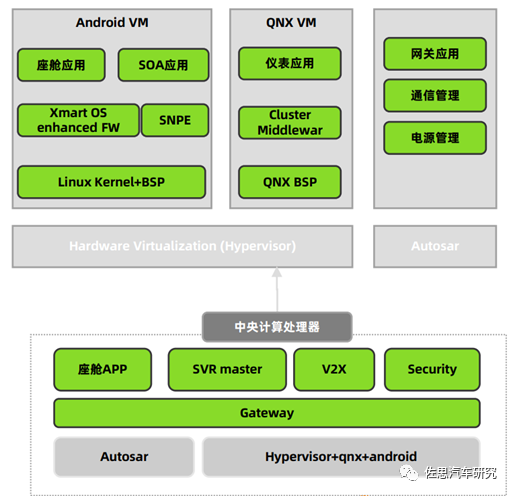
通过SOA软件,车企可以实现应用服务开发的开放生态(接口对外开放)、场景功能开发的差异化(任意子服务组合拼接)、单一场景化功能的快速迭代(只需进行子服务的重组)。小鹏汽车X-EEA 3.0架构中,将SOA软件重点应用于座舱平台。
小鹏汽车X-EEA 3.0中央计算域软件架构
来源:网络
E/E架构关键技术:跨域通信协议(SOME/IP和DDS),千兆以太骨干网+TSN+ Switch交换机,高宽带/高速率通信网络,实现域间高速通信与协同计算
车身网络需满足大数据量、高速传输、低延迟、高实时性的性能需求,目前主干网络已实现以太网+CAN-FD的高速网络,为跨域通信协议SOME/IP +DDS提供基础,目前主流通讯中间件SOME/IP和DDS,两者各有优势。
除了通讯中间件外,车云平台当前主要应用通讯协议MQTT等。运用MQTT协议,设备可以很方便灵活地连接到物联网云服务,比如汽车实时在线数据分析与监控、OTA、高清地图应用、车载大数据、Al分析等场景。
E/E架构通信网络设计思路
来源:网络
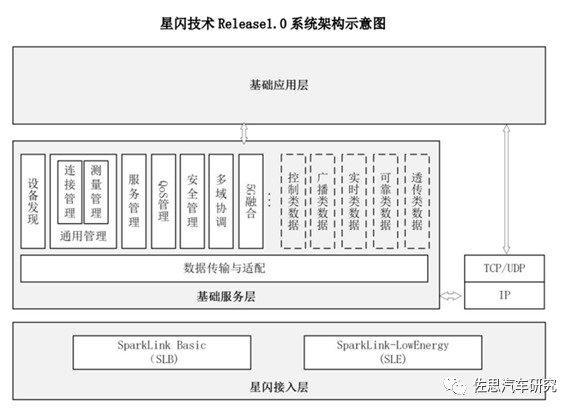
E/E架构关键技术:车载专用无线短距离通信技术
在国内,星闪联盟(SparkLink Alliance)于2020年9月成立,联盟2021年底发布星闪标准1.0,在2022年上半年推出测试仪表,同时启动星闪2.0标准立项工作。联盟的几家芯片企业已制定了明确的芯片路标,计划于2022年下半年推出商用芯片。基于商用芯片,各大产业的头部企业已经制定了商用终端的开发计划,计划于2023年推出。
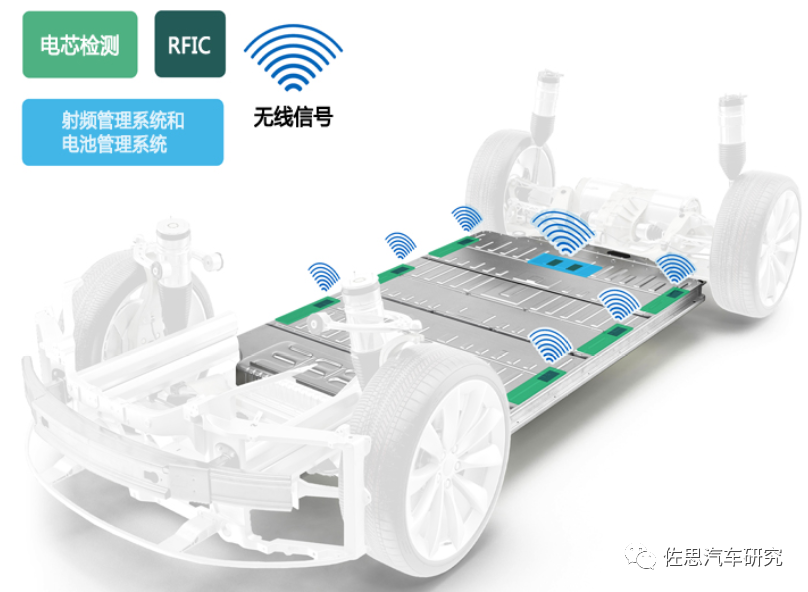
“星闪”无线短距离通信技术核心应用领域包括:沉浸式车载声场和降噪、无线交互投屏、车内无线氛围灯、360全景环视、无线BMS(电池管理系统)。
来源:网络
全球范围来看,凯迪拉克LYRIQ率先引入了无线电池管理系统(vBMS)革新技术,减少了90%的电池包线束,以及相应的连接器和接插件,从根本上规避了线束老化的问题。同时因为电池包线束减少,电池内部空间得到释放,布局和配置更加灵活,也可以安装更多电芯提高续航里程。
凯迪拉克采用亚德诺半导体(ADI)无线电池管理系统(vBMS)解决方案。
来源:网络
主机厂正加快电子电气架构演进步伐
阶段一:域集中架构阶段
大众的E3架构、长城GEEP3.0架构、比亚迪的E平台3.0架构、吉利的SEA架构、小鹏的EE 2.0架构等都是典型的域集中架构。
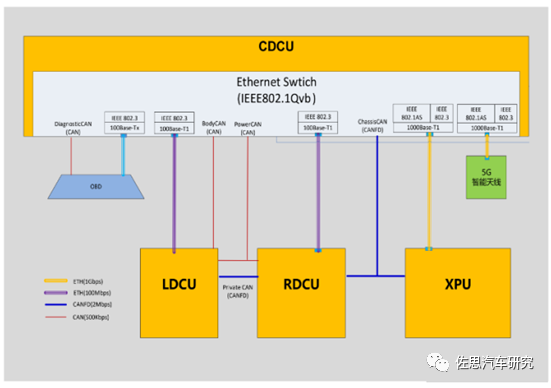
以大众E3架构为例,包括车辆控制(ICAS1)、智能驾驶(ICAS2)、智能座舱(ICAS3)等3个域控制器,ICAS1和ICAS3已经开发完成,并在ID.3、ID.4等车型上搭载,ICAS2尚未开发完成,辅助驾驶功能目前主要依靠分布式ECU和ICAS1实现功能调用。
大众ID.4 网络架构拓扑
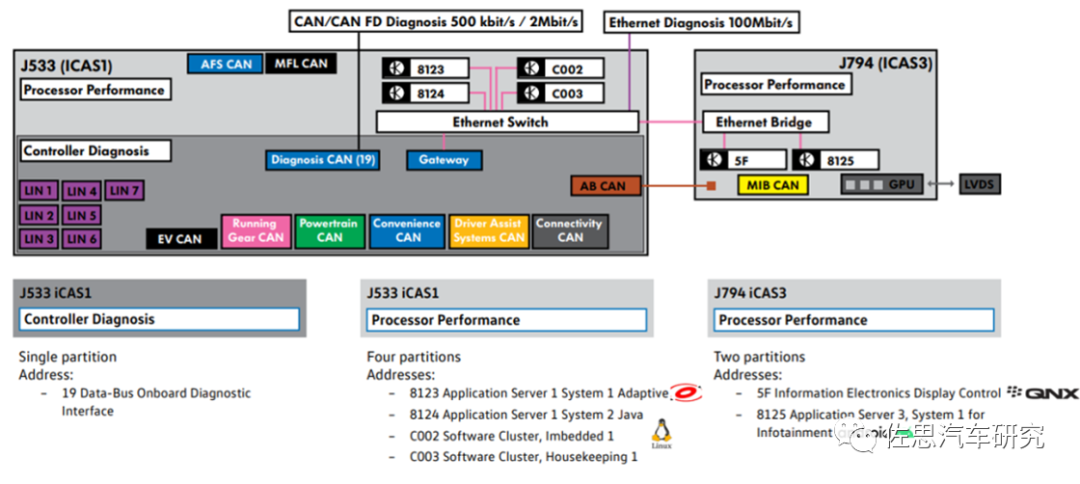
来源:网络
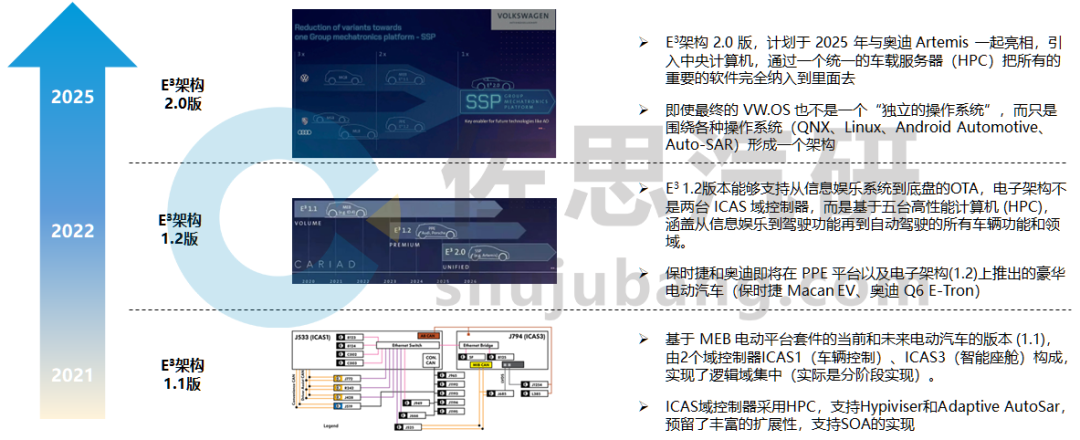
在MEB架构下,目前有两个架构阶段,E3 1.1版和E3 1.2版,平台功能持续演进优化。从2025年开始,大众、奥迪、保时捷三个平台将统一使用E3 2.0 SSP(Scalable Systems Platform)中央计算平台,可能率先应用于奥迪Artemis项目。
大众E3 1.1/1.2,向E3 2.0 SSP中央计算平台演进
来源:《2022年智能汽车E/E架构研究报告》
阶段二:准中央计算架构阶段,实现多域融合(如舱驾合一)
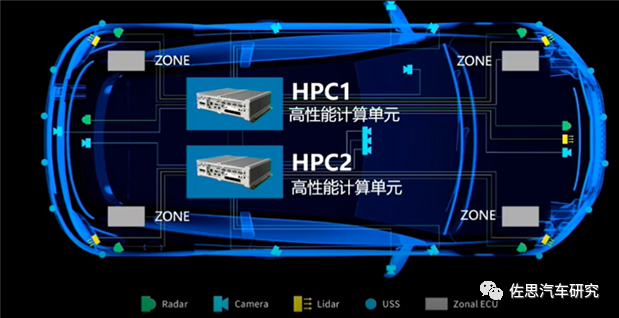
零束银河全栈 3.0电子电气架构使用主从两个高性能计算单元,即 HPC1和 HPC2来实现智能驾驶、智能座舱、智能计算、智能驾驶备份功能,再加 4个区域控制器,实现各自不同区域的相关功能,以全面支撑 L4 以上智能驾驶技术。该架构将融合CAN FD、千兆以太网、5G等不同的网络通讯技术,确保车辆拥有足够强大的脑通路。
上汽零束全栈3.0准中央 EEA,实现舱驾合一
阶段三:中央计算架构阶段,算力集中于一个超算平台,量产步伐可能比预期更快
中央计算架构,由中央计算单元、区域控制器和高速以太网构建基本骨架,通过三者的协同,构建自适应、自学习系统,实现智能互联和高级别自动驾驶。
-
蔚来的中央计算单元在性能上拥有1000TOPS以上的算力,主频大于1GHz,可能采用英伟达Adam超算平台;
-
蔚来的区域控制器主要功能包括,分布式边缘计算、车控仲裁中心、面向SOA服务通信的信息通信网络 、区域集中式数据中心、整车配电枢纽、传感器和执行器数据交换,由于区域控制器计算资源有限,为了实现跨域功能融合、跨域功能隔离。蔚来的方法是在区域控制器上采用AMP多核架构,AMP 模式的 RTOS 在各个 CPU 上均运行一个操作系统实例。
蔚来汽车中央计算+区域控制器EEA
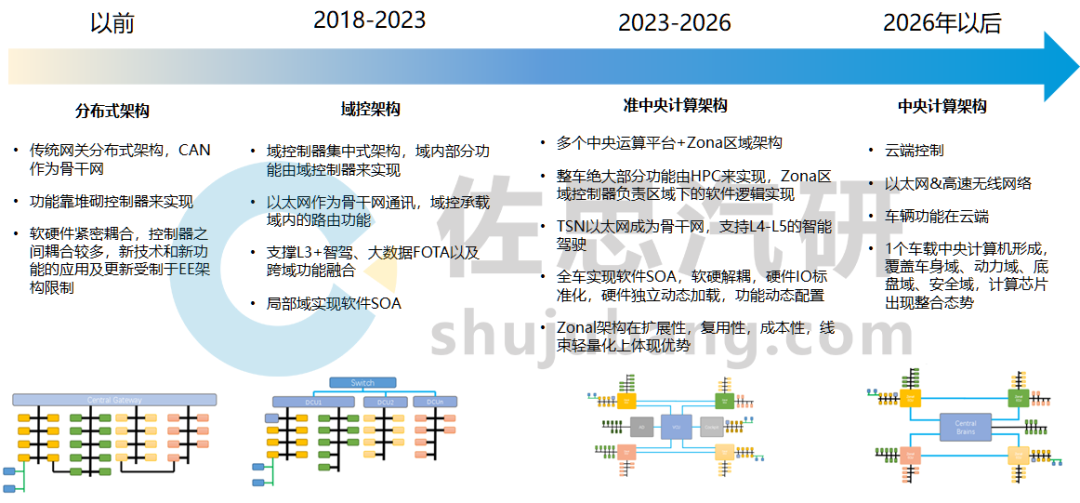
从发展趋势看,汽车E/E架构最终会向中央计算架构演进,将功能逻辑集中到1个中央控制器。主机厂E/E架构规划愈发激进,2023年将是造车新势力和传统主机厂量产下一代“准中央+区域架构”的关键时间节点。
同时,随着超高算力计算平台的量产、软件技术的快速迭代,中央计算架构甚至最快可能在未来5年内实现量产。
未来5-10年汽车E/E架构演变趋势
来源:《2022年智能汽车E/E架构研究报告》
**《2022年智能汽车E/E架构研究报告》**目录
本报告共420页
01
汽车E/E架构升级关键技术
1.1 汽车电子电气架构演进
1.1.1 汽车电子电气架构升级的四个维度
1.1.2 汽车电子电气架构发展趋势
1.1.3 未来十年的汽车E/E架构演变趋势
1.1.4 建立下一代E/E架构的关键技术要素
1.1.5 建立下一代E/E架构的核心要素和特点(1)
1.1.6 建立下一代E/E架构的核心要素和特点(2)
1.2 E/E架构关键技术:架构标准化
1.2.1 汽车EEA 标准:标准化需求框架
1.2.2 汽车EEA 标准:ISO 26262和GB/T 34590 相关标准
1.2.3 汽车EEA 标准:汽车电子电气架构工作组成立
1.2.4 汽车EEA 标准:汽车电子电气架构工作组尚待解决的问题
1.2.5 汽车EEA 标准:汽车电子电气架构工作组路线图及团体标准
1.2.6 汽车EEA 标准 (1)
1.2.7 汽车EEA 标准 (2)
1.2.8 汽车EEA 标准 (3)
1.2.9 汽车EEA 标准 (4)
1.2.10 汽车EEA 标准 (5)
1.2.11 汽车EEA 标准 (6)
1.2.12 汽车EEA 标准 (7)
1.2.13 汽车EEA 标准 (8)
1.2.14 汽车EEA 标准 (9)
1.2.15 汽车EEA 标准 (10)
**
**
1.3 E/E架构关键技术:完整的开发流程
1.3.1 汽车电子电气架构开发流程(1)
1.3.2 汽车电子电气架构开发流程(2)
1.3.3 汽车电子电气架构开发流程(3)
**
**
1.4 E/E架构关键技术:超大算力芯片和车云一体化计算
1.4.1 现阶段典型的域控硬件架构
1.4.2 域控硬件架构升级趋势
1.4.3 下一代硬件架构趋势 (1)
1.4.4 下一代硬件架构趋势 (2)
1.4.5 下一代硬件架构趋势 (3)
1.4.6 下一代硬件架构趋势 (4)
1.4.7 下一代硬件架构趋势 (5)
**
**
1.5 E/E架构关键技术:AP AUTOSAR和SOA软件
1.5.1 软件架构升级(1)
1.5.2 软件架构升级(2)
1.5.3 软件架构升级(3)
1.5.4 软件架构升级(4)
1.5.5 软件架构升级(5)
1.5.6 软件架构升级(6)
1.5.7 软件架构升级(7)
1.5.8 软件架构升级(8)
1.5.9 软件架构升级(9)
**
**
1.6 E/E架构关键技术:通信架构(SOME/IP和DDS)
1.6.1 通信架构升级(1)
1.6.2 通信架构升级(2)
1.6.3 通信架构升级(3)
1.6.4 通信架构升级(4)
1.6.5 通信架构升级(5)
1.6.6 通信架构升级(6)
1.6.7 通信架构升级(7)
1.6.8 通信架构升级(8)
**
**
1.7 E/E架构关键技术:通信架构(无线短距离通信技术)
1.7.1 国内车用短距离无线通信标准立项和发展动向
1.7.2 星闪联盟五大TOP应用场景
1.8 E/E架构关键技术:通信架构
1.8.1 车载以太网发展的三个阶段
1.8.2 汽车以太网的发展:EVBA和TSN时间敏感网络
1.8.3 L4级无人驾驶系统的核心:TSN以太交换机和802.1CB协议
1.8.4 E/E架构核心域控数据交换的媒介:Switch交换机(1)
1.8.5 E/E架构核心域控数据交换的媒介:Switch交换机(2)
1.8.6 E/E架构核心域控数据交换的媒介:Switch交换机(3)
**
**
1.9 E/E架构关键技术:通信架构(高速网关)
1.9.1 分布式网关、中央网关和以太网网关拓扑演进趋势
1.9.2 中央网关将改变汽车架构
1.9.3 网关控制器扮演未来E/E架构中车载数据服务器的角色
1.9.4 全新服务型网关控制器算力性能将有十倍以上的提升
1.9.5 未来SOA架构(即Zonal)的汽车网关
1.9.6 汽车网关的Gateway SoC控制芯片和通信协议
1.9.7 创新的下一代网关系统需支持各种高速 I / O
1.9.8 德州仪器DRA829V车辆计算网关平台
1.9.9 德州仪器新一代 Jacinto™ DRA821 处理器用于区域架构网关
1.10 E/E架构关键技术:车用操作系统、微内核和虚拟化
1.10.1 软件定义汽车架构分层设计
1.10.2 车用操作系统基础平台(1)
1.10.3 车用操作系统基础平台(2)
1.10.4 微内核操作系统
1.10.5 Hypervisor虚拟机
**
**
1.11 E/E架构关键技术:安全技术
1.11.1 下一代E/E架构安全技术趋势
1.11.2 下一代E/E架构通讯安全的核心要素保障
1.11.3 下一代E/E架构功能安全开发技术
**
**
1.12 E/E架构关键技术:工具链
1.12.1 E/E架构关键技术:工具链应用技术
1.13 E/E架构关键技术:Zonal区域控制器
1.13.1 下一代E/E架构计算集中式+区域控制器
**
**
1.13.2 Zonal EEA架构框架
1.13.3 区域控制器(ZCU)设计方案
1.13.4 ZCU与区内其他传感器与执行器之间的配合关系
**
**
1.14 E/E架构关键技术:电源架构(冗余策略)
1.14.1 自动驾驶车辆的供电网络系统
1.14.2 双电源系统及控制策略设计
1.14.3 车辆双电源系统的工作模式及主要诊断策略
**
**
1.15 E/E架构关键技术:电源架构(低压智能配电网络)
1.15.1 电源架构升级(1)
1.15.2 电源架构升级(2)
1.15.3 电源架构升级(3)
1.15.4 保险丝盒的发展过程
1.15.5 现阶段主流保险丝盒主流产品
1.15.6 Efuse电子熔丝智能配电产品
1.15.7 智能MOSFET取代传统的保险丝和机械式继电器
1.15.8 MOSFET智能电气盒的产品特点和优势
1.15.9 MOSFET智能电气盒的布置位置
1.15.10 MOSFET智能电气盒的三个发展阶段
1.15.11 特斯拉Model 3控制器节点电源分配
1.15.12 沃尔沃SPA2架构区控制架构配电策略
1.15.13 伟世通Zonal(区控制)E/E架构的分级配电策略
1.15.14 伟世通Zonal(区控制)E/E架构车辆分区智能电力分配
1.15.15 安波福SMART FUSE智能配电和区域控制器(1)
1.15.16 安波福SMART FUSE智能配电和区域控制器(2)
02
OEM和Tier1的E/E架构变革
2.1 新E/E架构下OEM和Tier1业务模式变革
2.1.1 传统分布式架构下OEM与Tier 1的合作模式
2.1.2 域控架构下OEM与Tier 1的合作模式(1)
2.1.3 域控架构下OEM与Tier 1的合作模式(2)
2.1.4 E/E架构的变革(1)
2.1.5 E/E架构的变革(2)
2.1.6 E/E架构的变革(3)
2.1.7 E/E架构的变革(4)
2.1.8 E/E架构的变革(5)
2.1.9 E/E架构的变革(6)
2.1.10 E/E架构的变革(7)
2.1.11 E/E架构的变革(8)
**
**
2.2 E/E架构演进参考架构
2.2.1 E/E架构进化方向:2025-2030
2.2.2 E/E架构进化方向:2025年参考架构(跨域控制器+服务器)(1)
2.2.3 E/E架构进化方向:2025年参考架构(跨域控制器+服务器)(2)
2.2.4 E/E架构进化方向:2025年参考架构(未来动力架构中的主控制器)
2.2.5 E/E架构进化方向:2030年参考架构(中央服务器+区域控制器)
2.2.6 E/E架构进化方向:2030年参考架构(总线拓扑)
2.2.7 E/E架构进化方向:2030年参考架构(低压电源拓扑)
2.3 OEM电子电气架构对比
2.3.1 车企的EE架构路线(1)
2.3.2 车企的EE架构路线(2)
2.3.3 主要OEM电子电气架构特点(1)
2.3.4 主要OEM电子电气架构特点(2)
2.3.5 主要OEM电子电气架构特点(3)
2.3.6 主要OEM电子电气架构特点(4)
2.3.7 2025年之前主机厂主要集中在域混合状态
03
造车新势力的电子电气架构
3.1 特斯拉
3.1.1 特斯拉EEA演进:技术路线(1)
3.1.2 特斯拉E/E架构演进历程:Model S、Model X、Model 3(1)
3.1.3 特斯拉E/E架构演进历程:Model S、Model X、Model 3(2)
3.1.4 特斯拉E/E架构演进历程:Model S EEA拓扑
3.1.5 特斯拉E/E架构演进历程:Model X EEA拓扑
3.1.6 特斯拉E/E架构演进历程:Model 3 EEA拓扑
3.1.7 特斯拉E/E架构演进历程:Model 3 EEA 架构特征
3.1.8 特斯拉E/E架构演进历程:Model 3 EEA Linux 操作系统
3.1.9 特斯拉EEA 系统设计:CCM中央计算模块+3个区域控制器
3.1.10 特斯拉EEA 硬件架构(自动驾驶):HW3.0自动驾驶域控制器(AP)电路板
3.1.11 特斯拉EEA 硬件架构(自动驾驶):HW3.0自动驾驶传感器配置
3.1.12 特斯拉EEA 硬件架构(智能座舱):MCU1/ MCU2/ MCU3 迭代历程
3.1.13 特斯拉EEA 硬件架构(智能座舱):MCU1/ MCU2/ MCU3 参数对比
3.1.14 特斯拉EEA 硬件架构(智能座舱):MCU2 / MCU3 系统框架对比
3.1.15 特斯拉EEA 硬件架构(智能座舱):MCU2 控制器电路板
3.1.16 特斯拉EEA 软件架构:SOA软件栈
3.1.17 特斯拉EEA 通信架构:ECU及网络类型节点(1)
3.1.18 特斯拉EEA 通信架构:ECU及网络类型节点(2)
3.1.19 特斯拉EEA 电源架构:智能配电盒架构(1)
3.1.20 特斯拉EEA 电源架构:智能配电盒架构(2)
3.1.21 特斯拉EEA 电源架构:智能配电盒架构(3)
3.1.22 特斯拉EEA Zonal控制器:3个车身控制器分布(1)
3.1.23 特斯拉EEA Zonal控制器:3个车身控制器分布(2)
3.1.24 特斯拉EEA Zonal控制器:3个车身控制器分布(3)
3.1.25 特斯拉EEA Zonal控制器:系统架构
3.1.26 特斯拉EEA Zonal控制器:功能分配
3.1.27 特斯拉EEA Zonal控制器:前Zonal控制器接口功能与位置布局
3.1.28 特斯拉EEA Zonal控制器:前Zonal控制器功能定义
3.1.29 特斯拉EEA Zonal控制器:前Zonal控制器电路板拆解
3.1.30 特斯拉EEA Zonal控制器:左车身Zonal控制器接口功能与位置布局
3.1.31 特斯拉EEA Zonal控制器:左车身Zonal控制器功能定义
3.1.32 特斯拉EEA Zonal控制器:左车身Zonal控制器电路板拆解
3.1.33 特斯拉EEA Zonal控制器:右车身Zonal控制器接口功能与位置布局
3.1.34 特斯拉EEA Zonal控制器:右车身Zonal控制器功能定义
3.1.35 特斯拉EEA Zonal控制器:右车身Zonal控制器电路板拆解
3.1.36 特斯拉EEA Zonal控制器:Gen1-Gen3 Zonal控制板迭代(1)
3.1.37 特斯拉EEA Zonal控制器:Gen1-Gen3 Zonal控制板迭代(2)
3.1.38 特斯拉EEA Zonal控制器:Gen4 Zonal控制板迭代
**
**
3.2 小鹏
3.2.1 小鹏汽车EEA演进:E/E 1.0-E/E 3.0
3.2.2 小鹏汽车EEA演进:自动驾驶域控XPU 2.5 - XPU 5.0
3.2.3 小鹏X-EEA 2.0:自动驾驶平台
3.2.4 小鹏X-EEA 2.0:智能座舱 Xmart OS 1.0-3.0
3.2.5 小鹏X-EEA 3.0:中央超算(3个计算群)+区域控制(Z-DCU)
3.2.6 小鹏X-EEA 3.0硬件架构:中央超算平台
3.2.7 小鹏X-EEA 3.0软件架构:中央计算域和智驾域软件架构
3.2.8 小鹏X-EEA 3.0软件架构:SOA软件架构(1)
3.2.9 小鹏X-EEA 3.0软件架构:SOA软件架构(2)
3.2.10 小鹏X-EEA 3.0软件架构:SOA软件架构(3)
3.2.11 小鹏X-EEA 3.0通信架构:以太网+CANFD
**
**
3.3 蔚来汽车
3.3.1 蔚来汽车EEA演进路线:NP1 / NP2平台
3.3.2 蔚来汽车EEA演进路线:下一代架构平台
3.3.3 蔚来NP2 EEA硬件架构:ADAM超算+ AQUILA超感(1)
3.3.4 蔚来NP2 EEA硬件架构:ADAM超算+ AQUILA超感(2)
3.3.5 蔚来NP2 EEA硬件架构:智能座舱
3.3.6 蔚来NP2 EEA硬件架构:智能底盘域控制器ICC(1)
3.3.7 蔚来NP2 EEA硬件架构:智能底盘域控制器ICC(2)
3.3.8 蔚来NP2 EEA通信架构:互联中央网关LION融合车身域
3.3.9 蔚来中央计算+区域控制器EEA:架构拓扑
3.3.10 蔚来中央计算+区域控制器EEA:功能特点
3.3.11 蔚来中央计算+区域控制器EEA:SOA软件
3.3.12 蔚来中央计算+区域控制器EEA:跨域功能融合和隔离
3.3.13 蔚来中央计算+区域控制器EEA:AMP微核架构(1)
3.3.14 蔚来中央计算+区域控制器EEA:AMP微核架构(2)
**
**
3.4 理想汽车
3.4.1 理想汽车EEA演进:LEEA1.0 – LEEA3.0
3.4.2 理想LEEA 2.0硬件架构:自动驾驶AD Max
3.4.3 理想LEEA 2.0硬件架构:自动驾驶算法
3.4.4 理想LEEA 2.0硬件架构:智能座舱
3.4.5 LEEA 2.0硬件架构:中央域控制器(XCU)
3.4.6 理想LEEA 3.0硬件架构:中央算力平台+4个区域控制器
3.4.7 理想LEEA 3.0硬件架构:CCU中央计算机(1)
3.4.8 理想LEEA 3.0硬件架构:CCU中央计算机(2)
3.4.9 理想LEEA 3.0硬件架构:区域控制器
3.4.10 理想LEEA 3.0通信架构:PCIe Switch和TSN Switch
3.4.11 理想LEEA 3.0软件架构:多层级服务的定义和部署
3.4.12 理想LEEA 3.0软件架构:操作系统LiOS(Li auto OS)
**
**
3.5 华人运通
3.5.1 华人运通 HOA架构:系统拓扑
3.5.2 华人运通 HOA架构合作伙伴(1)
3.5.3 华人运通 HOA架构合作伙伴(2)
3.5.4 华人运通 HOA硬件架构:自动驾驶(HiPhi Z)(1)
3.5.5 华人运通 HOA硬件架构:自动驾驶(HiPhi Z)(2)
3.5.6 华人运通 HOA硬件架构:智能座舱(HiPhi Z)(3)
3.5.7 华人运通 HOA软件架构:HiPhi Play
**
**
3.6 天际汽车
3.6.1 天际汽车EEA演进
3.6.2 天际汽车iMA EEA架构:自下而上高度集成5个层次
3.6.3 天际汽车iMA EEA硬件架构:动力域控VBU
**
**
3.7 集度汽车
3.7.1 度汽车JET EEA:支持四域融合计算
3.7.2 集度EEA 软件架构:SOA“舱驾融合”技术
3.7.3 集度EEA 硬件架构:自动驾驶和智能座舱
3.7.4 集度EEA 硬件架构:软件集成模拟样车 SIMUCar2.0
3.7.5 集度EEA 硬件架构:底盘域与智驾域融合
3.8 哪吒汽车
3.8.1 哪吒汽车EEA演进
3.8.2 哪吒汽车EEA 硬件架构:自动驾驶 TAPILOT4.0(1)
3.8.3 哪吒汽车EEA 硬件架构:自动驾驶 TAPILOT4.0(2)
3.8.4 哪吒汽车EEA 硬件架构:智能座舱
3.8.5 哪吒汽车EEA 硬件架构:智能动力控制域
3.8.6 哪吒汽车EEA 硬件架构:自研天工电池(1)
3.8.7 哪吒汽车EEA 硬件架构:自研天工电池(2)
3.8.8 哪吒汽车EEA 硬件架构:自研天工电池(3)
3.8.9 哪吒汽车EEA 硬件架构:热管理系统
04
自主品牌OEM的电子电气架构
4.1 吉利汽车
4.1.1 吉利EEA演进:GEEA 2.0 — GEEA 3.0
4.1.1 吉利EEA 硬件架构:芯擎座舱和自动驾驶SoC
4.1.2 吉利EEA 软件架构:SOA软件服务架构
4.1.3 吉利EEA 软件架构:吉利银河OS跨域融合操作系统
4.1.4 吉利GEEA3.0 EEA系统开发:架构特征
4.1.5 吉利GEEA3.0 EEA系统开发:中央计算电子架构-GEEA3.0
4.1.6 吉利GEEA3.0 EEA系统开发:基于SOA的操作系统
4.1.7 吉利GEEA3.0 EEA系统开发:PMT-SOA服务设计工具链改造
4.1.8 吉利GEEA3.0 EEA系统开发:PMT-SOA软件资产转化和复用方案
4.1.9 吉利GEEA3.0 EEA系统开发:PMT-SOA服务设计方法论
4.1.10 吉利GEEA3.0 EEA系统开发:PMT-SOA服务设计规范
4.1.11 吉利GEEA3.0 EEA系统开发:GOS-多协议多OS兼容
4.1.12 吉利GEEA3.0 EEA系统开发:开发者平台和工具链
4.1.13 吉利GEEA3.0 EEA系统开发:持续迭代的敏捷开发
4.1.14 ZEEKR(极氪)EEA演进:EE 2.0 — EE 3.0
4.1.15 ZEEKR(极氪)EE2.0软件架构:ZEEKR OS智能座舱
4.1.16 ZEEKR(极氪)EE3.0软件架构:基于SOA软件架构的OTA解决方案
**
**
4.2 长城汽车
4.2.1 长城EEA演进:技术路线
4.2.2 长城GEEP 4.0准中央EEA:架构特点
4.2.3 长城GEEP 4.0准中央EEA:3个计算平台+3个区域控制器
4.2.4 长城GEEP 4.0准中央EEA:硬件平台
4.2.5 长城GEEP 4.0准中央EEA:SOA软件框架(1)
4.2.6 长城GEEP 4.0准中央EEA:SOA软件框架(2)
4.2.7 长城GEEP 4.0准中央EEA:全栈式安全保障
4.2.8 长城GEEP 5.0中央计算EEA:中央大脑+区域控制器
**
**
4.3 广汽
4.3.1 广汽EEA演进:技术路线
4.3.2 广汽GA3.0星灵 EEA:3个计算单元+4个区域控制器
4.3.3 广汽GA3.0星灵 EEA:架构特点
4.3.4 广汽GA3.0星灵 EEA:硬件平台(1)
4.3.5 广汽GA3.0星灵 EEA:硬件平台(2)
4.3.6 广汽GA3.0星灵 EEA:SOA软件平台
4.3.7 广汽GA3.0星灵 EEA:广汽普赛OS系统框架
4.3.8 广汽GA3.0星灵 EEA:ADiGO智驾互联生态系统
4.3.9 广汽GA3.0星灵 EEA:用户共创平台
**
**
4.4 比亚迪
4.4.1 比亚迪EEA演进:技术路线
4.4.2 比亚迪e平台 3.0 EEA:系统设计
4.4.3 比亚迪e平台 3.0 EEA:多域计算思路
4.4.4 比亚迪e平台 3.0 EEA:集成式左右车身控制器
4.4.5 比亚迪e平台 3.0 EEA:智能动力域(1)
4.4.6 比亚迪e平台 3.0 EEA:智能动力域(2)
**
**
4.5 上汽
4.5.1 上汽EEA演进:银河全栈1.0、银河全栈3.0
4.5.2 上汽零束EEA技术框架:SOA平台(1)
4.5.3 上汽零束EEA技术框架:SOA平台(2)
4.5.4 上汽零束全栈3.0准中央 EEA:2个中央计算单元+4个区域控制器
4.5.5 上汽零束全栈3.0准中央 EEA:舱驾融合HPC
4.5.6 上汽零束全栈3.0准中央 EEA:舱驾融合软件架构
4.5.7 上汽零束全栈3.0准中央 EEA:SOA软件生态
4.5.8 上汽零束全栈3.0准中央 EEA:云管端SOA一体化软件
4.5.9 上汽零束全栈3.0准中央 EEA:合作生态
4.5.10 上汽智己EEA布局:软件、硬件、通信架构
4.5.11 上汽智己EEA布局:智能座舱
**
**
4.6 长安汽车
4.6.1 长安汽车EEA演进:技术路线
4.6.2 长安汽车基于软件定义汽车的SDA架构
4.6.3 长安汽车“中央+环网”电子电气架构:拓扑结构
4.6.4 长安汽车“中央+环网”电子电气架构:架构拓展性的思考
4.6.5 长安汽车“中央+环网”电子电气架构:服务化方案
4.6.6 长安汽车“中央+环网”电子电气架构:服务化通信
4.6.7 长安汽车“中央+环网”电子电气架构:主干网通讯
4.6.8 长安汽车“中央+环网”电子电气架构:近程通讯
4.6.9 长安汽车“中央+环网”电子电气架构:硬件I/O标准化
4.6.10 长安汽车“中央+环网”电子电气架构:信息安全
**
**
4.7 一汽红旗
4.7.1 一汽红旗EEA演进:FEEA2.0、FEEA3.0
4.7.2 一汽红旗FEEA2.0 EEA:架构特点
4.7.3 一汽红旗FEEA2.0 EEA:智能座舱平台
4.7.4 一汽红旗FEEA3.0 EEA:智控、智享、智驾三大平台
4.7.5 一汽红旗FEEA3.0 EEA:TSN以太网多域控制器
4.8 苏州金龙
4.8.1 “深蓝”mini Bus EEA:E/E架构框架图
4.8.2 “深蓝”mini Bus EEA:各系统平台(1)
4.8.3 “深蓝”mini Bus EEA:各系统平台(2)
4.8.4 “深蓝”mini Bus EEA:自动驾驶系统框架结构图
05
外资品牌OEM的电子电气架构
5.1 大众汽车
5.1.1 大众EEA演进:MQB—MEB—SSP
5.1.2 大众EEA演进:E(3) 1.1/1.2/2.0版本
5.1.3 大众MQB平台 EEA架构:通信拓扑(1)
5.1.4 大众MQB平台 EEA架构:通信拓扑(2)
5.1.5 大众MQB平台 EEA:系统架构
5.1.6 大众MEB平台 EEA:平台介绍
5.1.7 大众MEB平台 EEA:ID.4详细的架构拓扑图
5.1.8 大众MEB平台 EEA:ID.4通信网络连接
5.1.9 大众MEB平台 EEA:大众ID.4 网络架构拓扑
5.1.10 大众MEB平台 EEA:大众ID.4 网络架构指标定义及总线布局
5.1.11 大众MEB平台 EEA:大众ID.4 ICAS架构
5.1.12 大众MEB平台 EEA:大众ID.4 ICAS 计算架构
5.1.13 大众MEB平台 EEA:大众ID.4 ICAS 内部通信架构
5.1.14 大众MEB平台 EEA:大众ID.4 ICAS1和ICAS3的功能分区
5.1.15 大众MEB平台 EEA:ICAS1车控域功能分区
5.1.16 大众MEB平台 EEA:大众ID.4 ICAS3功能分区
5.1.17 大众MEB平台 EEA:大众ID.4 ICAS3主控芯片
5.1.18 大众MEB平台 EEA:大众ID.4 ICAS2辅助驾驶域
5.1.19 大众MEB平台 EEA:大众ID.4 智能天线系统
5.1.20 大众MEB平台 EEA:大众ID.4 OCU的连接图
5.1.21 大众MEB平台 EEA:大众ID.4 高压系统网络拓扑
5.1.22 大众MEB平台 EEA:大众ID.4 刹车系统网络拓扑
5.1.23 大众MEB平台 EEA:SOA软件架构(1)
5.1.24 大众MEB平台 EEA:SOA软件架构(2)
5.1.25 大众MEB平台 EEA:SOA软件架构(3)
5.1.26 大众MEB平台 EEA:云服务架构
5.1.27 大众MEB平台 EEA:网络安全架构
5.1.28 大众E³ 2.0 EEA:开发进展
5.1.29 大众E³ 2.0 EEA:CARIAD软件平台(1)
5.1.30 大众E³ 2.0 EEA:CARIAD软件平台(2)
5.1.31 大众E³ 2.0架构:VW.OS汽车操作系统
5.1.32 大众SSP架构:PPE和MEB都会并入未来SSP架构
5.1.33 大众SSP架构:EEA架构设计
5.1.34 大众SSP架构:车型规划
**
**
5.2 宝马汽车
5.2.1 宝马汽车EEA演进
5.2.2 宝马量产EEA:架构拓扑图
5.2.3 宝马量产EEA:架构拓扑中各节点的具体含义
5.2.4 宝马量产EEA:以太网通信节点
5.2.5 宝马量产EEA:HU-H座舱系统架构
5.2.6 宝马量产EEA:HU-H网联系统架构
5.2.7 宝马量产EEA:ADAS系统硬件配置
5.2.8 宝马量产EEA:ADAS系统架构和各节点含义
5.2.9 宝马Zonal EEA:架构设计思路
5.2.10 宝马Zonal EEA:准中央计算(2个计算群)+Zonal 区域控制器
5.2.11 宝马下一代Zonal EEA:架构拓扑图
5.2.12 宝马下一代Zonal EEA:硬件架构采用2个计算群
5.2.13 宝马下一代Zonal EEA:动态可配置系统DRS
5.2.14 宝马下一代Zonal EEA:通信架构及SOA解决方案
5.2.15 宝马下一代Zonal EEA:车载通信网络
5.2.16 宝马下一代Zonal EEA:自动驾驶硬件(安波福+EyeQ5)
5.2.17 宝马下一代Zonal EEA:自动驾驶硬件(法雷奥+高通)
5.2.18 宝马下一代Zonal EEA:智能座舱规划
5.2.19 宝马下一代Zonal EEA:Neue Klasse架构规划
**
**
5.3 奔驰汽车
5.3.1 奔驰量产EEA:STAR3网络架构概述
5.3.2 奔驰量产EEA:STAR3网络拓扑连接
5.3.3 奔驰量产EEA:STAR3高速通信带宽(1)
5.3.4 奔驰量产EEA:STAR3高速通信带宽(2)
5.3.5 奔驰量产EEA:STAR3高速通信带宽(3)
5.3.6 奔驰量产EEA:STAR3车载以太网网络拓扑
5.3.7 奔驰量产EEA:STAR3面向服务的通信方式(1)
5.3.8 奔驰量产EEA:STAR3面向服务的通信方式(2)
5.3.9 奔驰量产EEA:STAR3面向服务的通信方式(3)
5.3.10 奔驰量产EEA:STAR3网络和信息安全
5.3.11 奔驰量产EEA:STAR3 12V电源架构
5.3.12 奔驰量产EEA:STAR3架构拓扑
5.3.13 奔驰量产EEA:STAR3架构拓扑功能定义(1)
5.3.14 奔驰量产EEA:STAR3架构拓扑功能定义(2)
5.3.15 奔驰量产EEA:STAR3架构拓扑功能定义(3)
**
**
5.4 丰田
5.4.1 丰田Zonal架构:中央大脑+跨区域控制器
5.4.2 丰田Zonal架构:软件平台(BSW)演进路径
5.4.3 丰田Zonal架构:EEA演进及AUTOSAR BSW迁移
5.4.4 丰田Zonal架构:软件开发策略
5.4.5 丰田Zonal架构:自适应软件平台
5.4.6 丰田Zonal架构:计算机辅助软件工程(CASE)系统开发
5.4.7 丰田Zonal架构:网络安全和加密算法
5.4.8 丰田Zonal架构:Woven Planet 并购Lyft 自动驾驶部门
5.4.9 丰田Zonal架构:收购Renovo Motors,拓展开放式车辆开发平台Arene
**
**
5.5 通用
5.5.1 通用汽车EEA演进:技术路线
5.5.2 通用汽车EEA演进:Global A和Global B电子电气架构
5.5.3 通用汽车EEA演进:VIP智能电子架构技术特点
5.5.4 通用汽车EEA演进:技术特点(1)
5.5.5 通用汽车EEA演进:技术特点(2)
**
**
5.6 沃尔沃
5.6.1 沃尔沃EEA演进:技术路线
5.6.2 沃尔沃SPA1 EE架构:域集中式
5.6.3 沃尔沃SPA2 EE架构:三个计算机群VCU+区域控制器VIU
5.6.4 沃尔沃SPA2 EE架构:系统拓扑
5.6.5 沃尔沃SPA2 EE架构:系统开发步骤(第一阶段)
5.6.6 沃尔沃SPA2 EE架构:系统开发步骤(第二阶段)
5.6.7 沃尔沃SPA2 EE架构:VCU中央计算机
5.6.8 沃尔沃SPA2 EE架构:中央计算平台的软件开发(1)
5.6.9 沃尔沃SPA2 EE架构:中央计算平台的软件开发(2)
5.6.10 沃尔沃SPA2 EE架构:中央计算平台的软件开发(3)
5.6.11 沃尔沃SPA2 EE架构:中央计算平台的软件开发(4)
5.6.12 沃尔沃SPA2 EE架构:中央计算平台的软件开发(5)
5.6.13 沃尔沃SPA2 EE架构:中国in house核心开发团队
5.6.14 沃尔沃SPA2 EE架构:计划2022年发布
5.6.15 沃尔沃SPA2 Zonal EEA系统设计:中央计算VCU+区域控制器VIU
5.6.16 沃尔沃SPA2 Zonal EEA系统设计:VIU区域控制器功能分配
5.6.17 沃尔沃SPA2 Zonal EEA系统设计:VIU区域控制器系统架构
5.6.18 沃尔沃SPA2 Zonal EEA系统设计:SOA软件设计框架
5.6.19 沃尔沃SPA2 Zonal EEA系统设计:硬件平台
5.6.20 沃尔沃SPA2 Zonal EEA系统设计:SOA软件
5.6.21 沃尔沃SPA2 Zonal EEA系统设计:VolvoCars.OS操作系统
**
**
5.7 日产
5.7.1 雷诺-日产-三菱联盟(RNM)EEA演进:技术规划
5.7.2 雷诺-日产-三菱联盟(RNM)EEA演进:HPC +Zonal+Sensor架构
5.7.3 日产新一代ProPilot配置
5.7.4 日产ADAS算法自研情况
5.8 Stellantis
5.8.1 Stellantis STLA Brain准中央EEA:HPC和Zonal控制器
5.8.2 Stellantis STLA Brain准中央EEA:三大技术平台