

关于Netty都需要了解哪些基础?一文带你详细了解,欢迎收藏!

▐ 整体结构
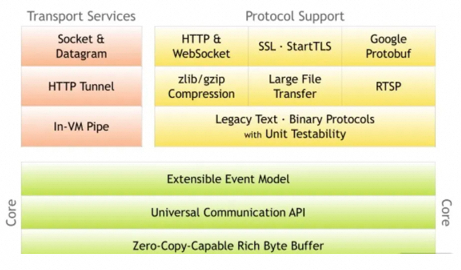
Core 核心层
Core 核心层是 Netty 最精华的内容,它提供了底层网络通信的通用抽象和实现,包括事件模型、通用API、支持零拷贝的 ByteBuf 等。
Protocol Support 协议支持层
协议支持层基本上覆盖了主流协议的编解码实现,如 HTTP、Protobuf、WebSocket、二进制等主流协议,此外 Netty 还支持自定义应用层协议。Netty 丰富的协议支持降低了用户的开发成本,基于 Netty 我们可以快速开发 HTTP、WebSocket 等服务。
Transport Service 传输服务层
传输服务层提供了网络传输能力的定义和实现方法。它支持 Socket、HTTP 隧道、虚拟机管道等传输方式。Netty 对 TCP、UDP 等数据传输做了抽象和封装,用户可以更聚焦在业务逻辑实现上,而不必关系底层数据传输的细节。
▐ 逻辑架构

-
网络通信层
-
事件调度层

-
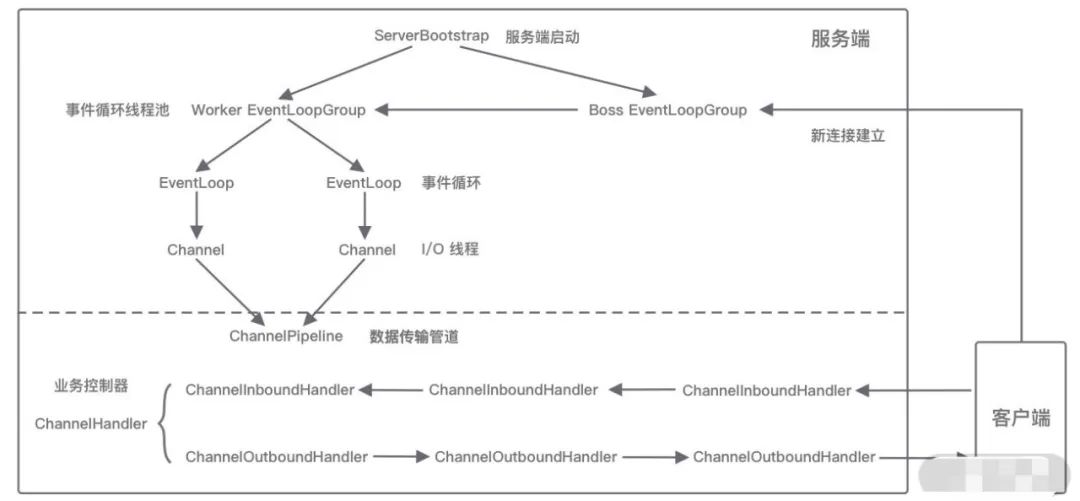
一个 EventLoopGroup 往往包含一个或者多个 EventLoop。 -
EventLoop 同一时间会与一个Channel绑定,每个 EventLoop 负责处理一种类型 Channel。 -
Channel 在生命周期内可以对和多个 EventLoop 进行 多次绑定和解绑 。
-
单线程模型:EventLoopGroup 只包含一个 EventLoop,Boss 和 Worker 使用同一个EventLoopGroup; -
多线程模型:EventLoopGroup 包含多个 EventLoop,Boss 和 Worker 使用同一个EventLoopGroup; -
主从多线程模型:EventLoopGroup 包含多个 EventLoop,Boss 是主 Reactor,Worker 是从 Reactor,它们分别使用不同的 EventLoopGroup,主 Reactor 负责新的网络连接 Channel 创建,然后把 Channel 注册到从 Reactor。
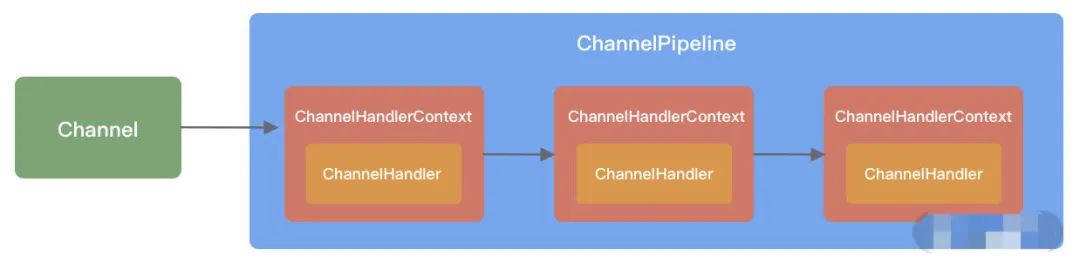
服务编排层
服务编排层的职责是负责组装各类服务,它是 Netty 的核心处理链,用以实现网络事件的动态编排和有序传播。
服务编排层的核心组件包括 ChannelPipeline、ChannelHandler、ChannelHandlerContext。


▐ 五种IO模型的区别
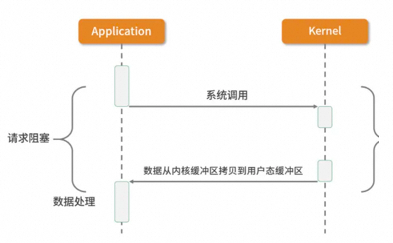
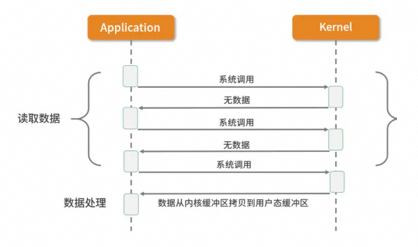
阻塞I/O:(BIO)
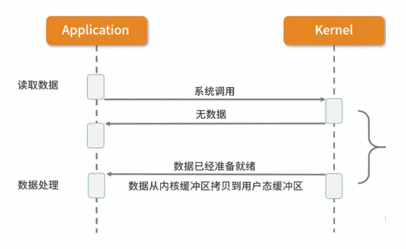
同步非阻塞I/O(NIO)
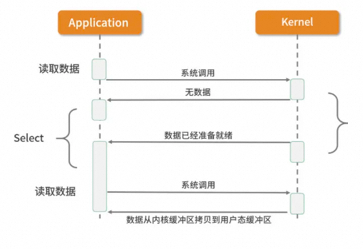
多路复用I/O(select和poll)
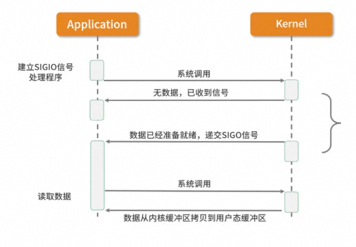
信号驱动IO模型,应用进程告诉内核:当数据报准备好的时候,给我发送一个信号,对SIGIO信号进行捕捉,并且调用我的信号处理函数来获取数据报。
异步I/O(Posix.1的aio_系列函数)
当应用程序调用aio_read时,内核一方面去取数据报内容返回,另一方面将程序控制权还给应用进程,应用进程继续处理其他事情,是一种非阻塞的状态。当内核中有数据报就绪时,由内核将数据报拷贝到应用程序中,返回aio_read中定义好的函数处理程序。
▐ Reactor多线程模型
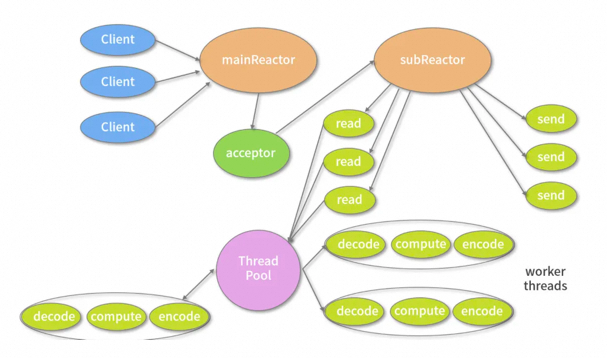
Reactor 实现相对简单,适合处理耗时短的场景,对于耗时长的 I/O 操作容易造成阻塞。Proactor 性能更高,但是实现逻辑非常复杂,适合图片或视频流分析服务器,目前主流的事件驱动模型还是依赖 select 或 epoll 来实现。
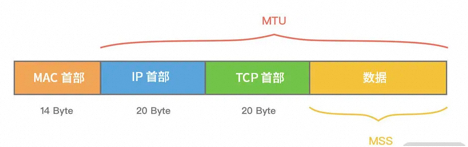
▐ 拆包粘包问题
拆包TCP 传输协议是面向流的,没有数据包界限。
-
Nagle 算法
-
拆包/粘包的解决方案
特定分隔符
消息长度 + 消息内容(Netty)
▐ 自定义协议
Netty 常用编码器类型:
MessageToByteEncoder //对象编码成字节流;MessageToMessageEncoder //一种消息类型编码成另外一种消息类型。
ByteToMessageDecoder/ReplayingDecoder //将字节流解码为消息对象;MessageToMessageDecoder //将一种消息类型解码为另外一种消息类型。
编解码器可以分为一次解码器和二次解码器,一次解码器用于解决 TCP 拆包/粘包问题,按协议解析后得到的字节数据。如果你需要对解析后的字节数据做对象模型的转换,这时候便需要用到二次解码器,同理编码器的过程是反过来的。
Netty自定义协议内容:
/*+---------------------------------------------------------------+| 魔数 2byte | 协议版本号 1byte | 序列化算法 1byte | 报文类型 1byte |+---------------------------------------------------------------+| 状态 1byte | 保留字段 4byte | 数据长度 4byte |+---------------------------------------------------------------+| 数据内容 (长度不定) |+---------------------------------------------------------------+*/
▐ WriteAndFlush

writeAndFlush 属于出站操作,它是从 Pipeline 的 Tail 节点开始进行事件传播,一直向前传播到 Head 节点。不管在 write 还是 flush 过程,Head 节点都中扮演着重要的角色。
write 方法并没有将数据写入 Socket 缓冲区,只是将数据写入到 ChannelOutboundBuffer 缓存中,ChannelOutboundBuffer 缓存内部是由单向链表实现的。
flush 方法才最终将数据写入到 Socket 缓冲区。

内存管理
▐ 堆外内存
在 Java 中对象都是在堆内分配的,通常我们说的JVM 内存也就指的堆内内存,堆内内存完全被JVM 虚拟机所管理,JVM 有自己的垃圾回收算法,对于使用者来说不必关心对象的内存如何回收。堆外内存与堆内内存相对应,对于整个机器内存而言,除堆内内存以外部分即为堆外内存。堆外内存不受 JVM 虚拟机管理,直接由操作系统管理。使用堆外内存有如下几个优点:
堆内内存由 JVM GC 自动回收内存,降低了 Java 用户的使用心智,堆外内存由于不受 JVM 管理,所以在一定程度上可以降低 GC 对应用运行时带来的影响。
堆外内存需要手动释放,这一点跟 C/C++ 很像,稍有不慎就会造成应用程序内存泄漏,当出现内存泄漏问题时排查起来会相对困难。
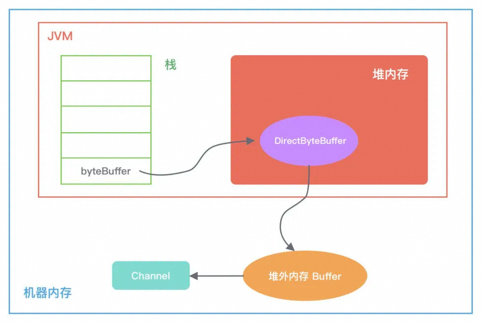
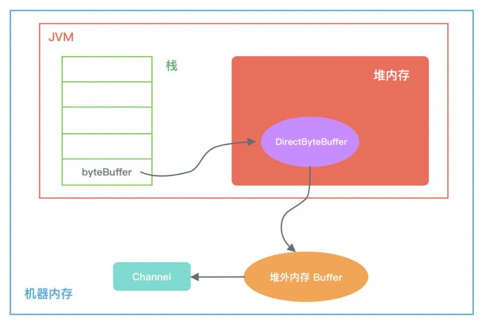
当进行网络 I/O 操作、文件读写时,堆内内存都需要转换为堆外内存,然后再与底层设备进行交互,所以直接使用堆外内存可以减少一次内存拷贝。
堆外内存可以方便实现进程之间、JVM 多实例之间的数据共享。
在堆内存放的 DirectByteBuffer 对象并不大,仅仅包含堆外内存的地址、大小等属性,同时还会创建对应的 Cleaner 对象,通过 ByteBuffer 分配的堆外内存不需要手动回收,它可以被 JVM 自动回收。当堆内的 DirectByteBuffer 对象被 GC 回收时,Cleaner 就会用于回收对应的堆外内存。
当初始化堆外内存时,内存中的对象引用情况如下图所示,first 是 Cleaner 类中的静态变量,Cleaner 对象在初始化时会加入 Cleaner 链表中。DirectByteBuffer 对象包含堆外内存的地址、大小以及 Cleaner 对象的引用,ReferenceQueue 用于保存需要回收的 Cleaner 对象。
▐ 数据载体ByteBuf
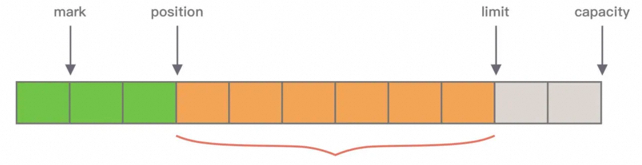
JDK NIO 的 ByteBuffer
-
mark:为某个读取过的关键位置做标记,方便回退到该位置; -
position:当前读取的位置; -
limit:buffer 中有效的数据长度大小; -
capacity:初始化时的空间容量。
-
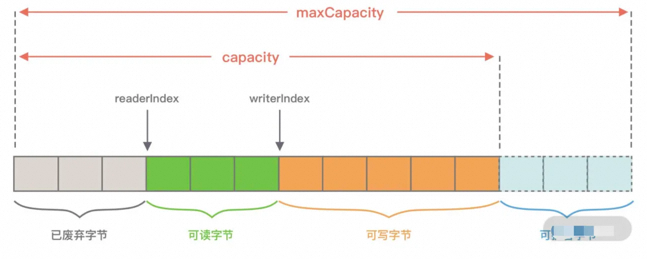
废弃字节,表示已经丢弃的无效字节数据。 -
可读字节,表示 ByteBuf 中可以被读取的字节内容,可以通过 writeIndex - readerIndex 计算得出。当读写位置重叠时时,表示 ByteBuf 已经不可读。 -
可写字节,向 ByteBuf 中写入数据都会存储到可写字节区域。当 writeIndex 超过 capacity,表示 ByteBuf 容量不足,需要扩容。 -
可扩容字节,表示 ByteBuf 最多还可以扩容多少字节,最多扩容到 maxCapacity 为止,超过 maxCapacity 再写入就会出错。
-
引用计数
▐ 内存分配jemalloc
为了减少分配时产生的内部碎片和外部碎片,常见的内存分配算法动态内存分配、伙伴算法和Slab 算法。
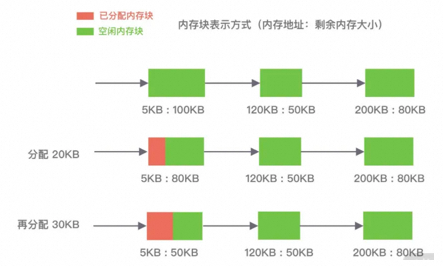
动态内存分配(DMA)
⾸次适应算法(first fit),空闲分区链以地址递增的顺序将空闲分区以双向链表的形式连接在一起,从空闲分区链中找到第一个满足分配条件的空闲分区,然后从空闲分区中划分出一块可用内存给请求进程,剩余的空闲分区仍然保留在空闲分区链中。
循环首次适应算法(next fit)不再是每次从链表的开始进行查找,而是从上次找到的空闲分区的以后开始查找。查找效率提升,会产生更多的碎片。
最佳适应算法(best fit),空闲分区链以空闲分区大小递增的顺序将空闲分区以双向链表的形式连接在一起,每次从空闲分区链的开头进行查找。
伙伴算法(外部碎片少,内部碎片多)
是一种非常经典的内存分配算法,它采用了分离适配的设计思想,将物理内存按照 2 的次幂进行划分,内存分配时也是按照 2 的次幂大小进行按需分配。
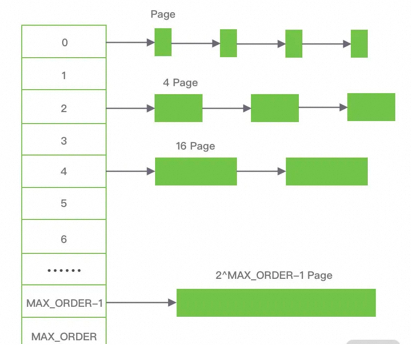
首先需要找到存储 2^4 连续 Page 所对应的链表,即数组下标为 4;
查找 2^4 链表中是否有空闲的内存块,如果有则分配成功;
如果 2^4 链表不存在空闲的内存块,则继续沿数组向上查找,即定位到数组下标为 5 的链表,链表中每个节点存储 2^5 的连续 Page;
如果 2^5 链表中存在空闲的内存块,则取出该内存块并将它分割为 2 个 2^4 大小的内存块,其中一块分配给进程使用,剩余的一块链接到 2^4 链表中。
Slab 算法(解决伙伴算法内部碎片问题)
Slab 算法在伙伴算法的基础上,对小内存的场景专门做了优化,采用了内存池的方案,解决内部碎片问题。
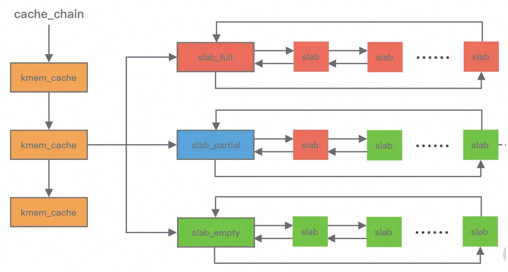
在 Slab 算法中维护着大小不同的 Slab 集合,将这块内存划分为大小相同的 slot,不会对内存块再进行合并,同时使用位图 bitmap 记录每个 slot 的使用情况。
kmem_cache 中包含三个 Slab 链表:完全分配使用 slab_full、部分分配使用 slab_partial和完全空闲 slabs_empty,这三个链表负责内存的分配和释放。Slab 算法是基于对象进行内存管理的,它把相同类型的对象分为一类。当分配内存时,从 Slab 链表中划分相应的内存单元;单个 Slab 可以在不同的链表之间移动,例如当一个 Slab 被分配完,就会从 slab_partial 移动到 slabs_full,当一个 Slab 中有对象被释放后,就会从 slab_full 再次回到 slab_partial,所有对象都被释放完的话,就会从 slab_partial 移动到 slab_empty。当释放内存时,Slab 算法并不会丢弃已经分配的对象,而是将它保存在缓存中,当下次再为对象分配内存时,直接会使用最近释放的内存块。
▐ jemalloc 架构
内存是由一定数量的 arenas 负责管理,线程均匀分布在 arenas 当中;
每个 arena 都包含一个 bin 数组,每个 bin 管理不同档位的内存块;
-
每个 arena 被划分为若干个 chunks,每个 chunk 又包含若干个 runs,每个 run 由连续的 Page 组成,run 才是实际分配内存的操作对象; -
每个 run 会被划分为一定数量的 regions,在小内存的分配场景,region 相当于用户内存; -
每个 tcache 对应一个 arena,tcache 中包含多种类型的 bin。

内存管理Arena ,内存由一定数量的 arenas 负责管理。每个用户线程采用 round-robin 轮询的方式选择可用的 arena 进行内存分配。
分级管理Bin,每个 bin 管理的内存大小是按分类依次递增。jemalloc 中小内存的分配是基于 Slab 算法完成的,会产生不同类别的内存块。
Page集合chunk,chunk 以 Page 为单位管理内存。每个 chunk 可被用于多次小内存的申请,但是在大内存分配的场景下只能分配一次。
实际分配单位run,run 结构具体的大小由不同的 bin 决定,例如 8 字节的 bin 对应的 run 只有一个 Page,可以从中选取 8 字节的块进行分配。
run 细分region,每个 run 会将划分为若干个等长的 region,每次内存分配也是按照 region 进行分发。
tcache 是每个线程私有的缓存,tcache 每次从 arena 申请一批内存,在分配内存时首先在 tcache 查找,避免锁竞争,分配失败才会通过 run 执行内存分配。

Small 场景,如果请求分配内存的大小小于 arena 中的最小的 bin,那么优先从线程中对应的 tcache 中进行分配。首先确定查找对应的 tbin 中是否存在缓存的内存块,如果存在则分配成功,否则找到 tbin 对应的 arena,从 arena 中对应的 bin 中分配 region 保存在 tbin 的 avail 数组中,最终从 availl 数组中选取一个地址进行内存分配,当内存释放时也会将被回收的内存块进行缓存。
Large 场景的内存分配与 Smalll 类似,如果请求分配内存的大小大于 arena 中的最小的 bin,但是不大于 tcache 中能够缓存的最大块,依然会通过 tcache 进行分配,但是不同的是此时会分配 chunk 以及所对应的 run,从 chunk 中找到相应的内存空间进行分配。内存释放时也跟 samll 场景类似,会把释放的内存块缓存在 tacache 的 tbin 中。此外还有一种情况,当请求分配内存的大小大于tcache 中能够缓存的最大块,但是不大于 chunk 的大小,那么将不会采用 tcache 机制,直接在 chunk 中进行内存分配。
Huge 场景,如果请求分配内存的大小大于 chunk 的大小,那么直接通过 mmap 进行分配,调用 munmap 进行回收。
▐ 零拷贝技术
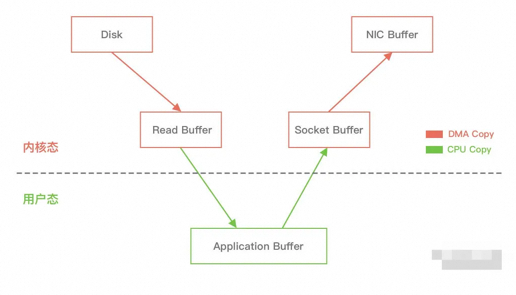
当用户进程发起 read() 调用后,上下文从用户态切换至内核态。DMA 引擎从文件中读取数据,并存储到内核态缓冲区,这里是第一次数据拷贝。
请求的数据从内核态缓冲区拷贝到用户态缓冲区,然后返回给用户进程。第二次数据拷贝的过程同时,会导致上下文从内核态再次切换到用户态。
用户进程调用 send() 方法期望将数据发送到网络中,用户态会再次切换到内核态,第三次数据拷贝请求的数据从用户态缓冲区被拷贝到 Socket 缓冲区。
最终 send() 系统调用结束返回给用户进程,发生了第四次上下文切换。第四次拷贝会异步执行,从 Socket 缓冲区拷贝到协议引擎中。
-
堆外内存,避免 JVM 堆内存到堆外内存的数据拷贝。 -
CompositeByteBuf 类,可以组合多个 Buffer 对象合并成一个逻辑上的对象,避免通过传统内存拷贝的方式将几个 Buffer 合并成一个大的 Buffer。 -
通过 Unpooled.wrappedBuffer 可以将 byte 数组包装成 ByteBuf 对象,包装过程中不会产生内存拷贝。 -
ByteBuf.slice ,slice 操作可以将一个 ByteBuf 对象切分成多个 ByteBuf 对象,切分过程中不会产生内存拷贝,底层共享一个 byte 数组的存储空间。 -
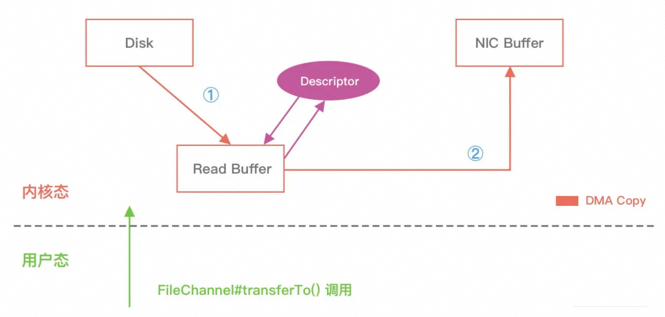
Netty 使用 封装了transferTo() 方法 FileRegion,可以将文件缓冲区的数据直接传输到目标 Channel,避免内核缓冲区和用户态缓冲区之间的数据拷贝。

▐ FastThreadLocal
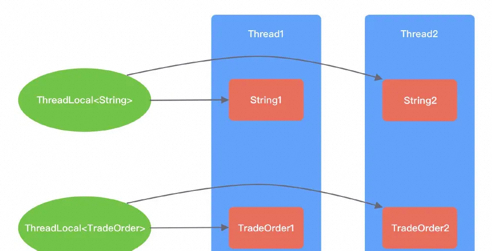
ThreadLocal 可以理解为线程本地变量。ThreadLocal 为变量在每个线程中都创建了一个副本,该副本只能被当前线程访问,多线程之间是隔离的,变量不能在多线程之间共享。这样每个线程修改变量副本时,不会对其他线程产生影响。
既然多线程访问 ThreadLocal 变量时都会有自己独立的实例副本,那么很容易想到的方案就是在 ThreadLocal 中维护一个 Map,记录线程与实例之间的映射关系。当新增线程和销毁线程时都需要更新 Map 中的映射关系,因为会存在多线程并发修改,所以需要保证 Map 是线程安全的。但是在高并发的场景并发修改 Map 需要加锁,势必会降低性能。
JDK 为了避免加锁,采用了相反的设计思路。以 Thread 入手,在 Thread 中维护一个 Map,记录 ThreadLocal 与实例之间的映射关系,这样在同一个线程内,Map 就不需要加锁了。
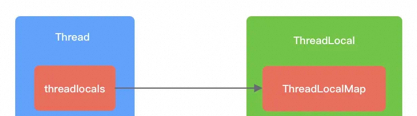
ThreadLocalMap 是一种使用线性探测法实现的哈希表,底层采用数组存储数据,通过魔数0x61c88647来使散列更加平衡。ThreadLocalMap 初始化一个长度为 16 的 Entry 数组。与 HashMap 不同的是,Entry 的 key 就是 ThreadLocal对象本身,value 就是用户具体需要存储的值。
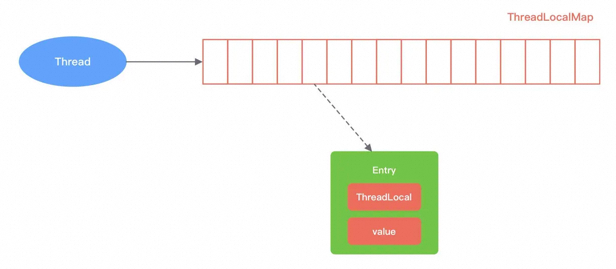
Entry 继承自弱引用类 WeakReference,Entry 的 key 是弱引用,value 是强引用。在 JVM 垃圾回收时,只要发现了弱引用的对象,不管内存是否充足,都会被回收。那么为什么 Entry 的 key 要设计成弱引用呢?如果 key 都是强引用,当线 ThreadLocal 不再使用时,然而 ThreadLocalMap 中还是存在对 ThreadLocal 的强引用,那么 GC 是无法回收的,从而造成内存泄漏。

虽然 Entry 的 key 设计成了弱引用,但是当 ThreadLocal不再使用(业务逻辑走完,但是由于线程复用导致线程并没有结束)被 GC 回收后,ThreadLocalMap 中可能出现 Entry 的 key 为 NULL,那么 Entry 的 value 一直会强引用数据而得不到释放,只能等待线程销毁。那么应该如何避免 ThreadLocalMap 内存泄漏呢?ThreadLocal 已经帮助我们做了一定的保护措施,在执行 ThreadLocal.set()/get() 方法时,ThreadLocal 会清除 ThreadLocalMap 中 key 为 NULL 的 Entry 对象,让它还能够被 GC 回收。除此之外,当线程中某个 ThreadLocal 对象不再使用时,立即调用 remove() 方法删除 Entry 对象。如果是在异常的场景中,应在 finally 代码块中进行清理,保持良好的编码意识。在Netty中,可以方便的使用FashThreadLocal来防止内存泄漏。

▐ FastThreadLocal
FastThreadLocal 使用 Object 数组替代了 Entry 数组,Object[0] 存储的是一个Set<FastThreadLocal<?>> 集合,从数组下标 1 开始都是直接存储的 value 数据,不再采用 ThreadLocal 的键值对形式进行存储。主要是针对set方法,增加了两个额外的行为。
找到数组下标 index 位置,设置新的 value。
将 FastThreadLocal 对象保存到待清理的 Set 中。

高效查找。FastThreadLocal 在定位数据的时候可以直接根据数组下标 index 获取,时间复杂度 O(1)。而 JDK 原生的 ThreadLocal 在数据较多时哈希表很容易发生 Hash 冲突,线性探测法在解决 Hash 冲突时需要不停地向下寻找,效率较低。此外,FastThreadLocal 相比 ThreadLocal 数据扩容更加简单高效,FastThreadLocal 以 index 为基准向上取整到 2 的次幂作为扩容后容量,然后把原数据拷贝到新数组。而 ThreadLocal 由于采用的哈希表,所以在扩容后需要再做一轮 rehash。
▐ HashedTimerWheel
生成月统计报表、每日得分结算、邮件定时推送
-
按固定周期定时执行 -
延迟一定时间后执行 -
指定某个时刻执行
-
Schedule 新增任务至任务集合; -
Cancel 取消某个任务; -
Run 执行到期的任务
Timer小根堆队列,deadline 任务位于堆顶端,弹出的始终是最优先被执行的任务。Run 操作时间复杂度 O(1),Schedule 和Cancel 操作的时间复杂度都是 O(logn)。
不论有多少任务被加入数组,始终由 异步线程TimerThread 负责处理。TimerThread 会定时轮询 TaskQueue 中的任务,如果堆顶的任务的 deadline 已到,那么执行任务;如果是周期性任务,执行完成后重新计算下一次任务的 deadline,并再次放入小根堆;如果是单次执行的任务,执行结束后会从 TaskQueue 中删除。
DelayedQueue 采用优先级队列 PriorityQueue延迟获取对象的阻塞队列。DelayQueue中的每个对象都必须实现Delayed 接口,并重写 compareTo 和 getDelay 方法。
为了解决 Timer 的设计缺陷,JDK 提供了功能更加丰富的 ScheduledThreadPoolExecutor,多线程、相对时间、对异常-
时间轮原理分析
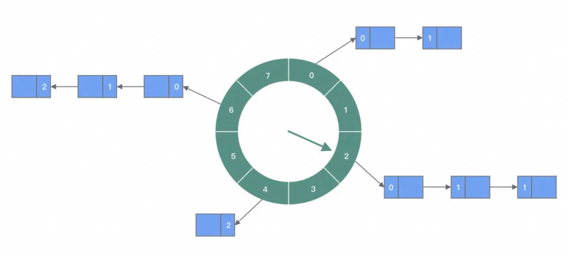
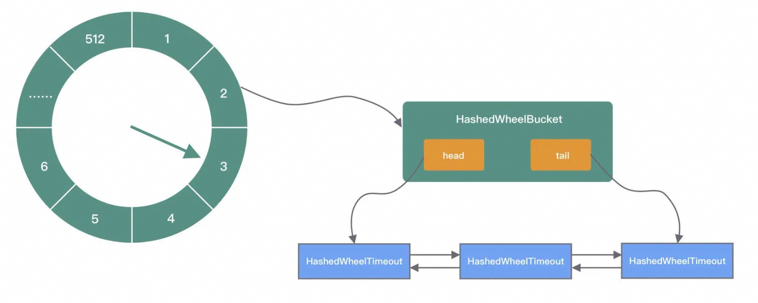
public HashedWheelTimer( ThreadFactory threadFactory, //线程池,但是只创建了一个线程 long tickDuration, //时针每次 tick 的时间,相当于时针间隔多久走到下一个 slot TimeUnit unit, //表示 tickDuration 的时间单位,tickDuration * unit int ticksPerWheel, //时间轮上一共有多少个 slot,默认 512 个。boolean leakDetection, long maxPendingTimeouts) {//最大允许等待任务数 // 省略其他代码 wheel = createWheel(ticksPerWheel); // 创建时间轮的环形数组结构 mask = wheel.length - 1; // 用于快速取模的掩码 long duration = unit.toNanos(tickDuration); // 转换成纳秒处理 workerThread = threadFactory.newThread(worker); // 创建工作线程 leak = leakDetection || !workerThread.isDaemon() ? leakDetector.track(this) : null; // 是否开启内存泄漏检测 this.maxPendingTimeouts = maxPendingTimeouts; // 最大允许等待任务数,HashedWheelTimer 中任务超出该阈值时会抛出异常}
-
时间轮空推进问题
-
Kafka解决方案
为了解决任务时间跨度很大的问题,Kafka 引入了层级时间轮,如下图所示。当任务的 deadline 超出当前所在层的时间轮表示范围时,就会尝试将任务添加到上一层时间轮中,跟钟表的时针、分针、秒针的转动规则是同一个道理。
▐ select、poll、epoll的区别
select (windows)**poll **(linux)本质上和select没有区别,查询每个fd对应的设备状态,如果设备就绪则在设备等待队列中加入一项并继续遍历,如果遍历完所有fd后没有发现就绪设备,则挂起当前进程,直到设备就绪或者主动超时,被唤醒后它又要再次遍历fd。
Epoll空轮询漏洞
在 JDK 中, Epoll 的实现是存在漏洞的,即使 Selector 轮询的事件列表为空,NIO 线程一样可以被唤醒,导致 CPU 100% 占用。实际上 Netty 并没有从根源上解决该问题,而是巧妙地规避了这个问题。
long time = System.nanoTime();if (/*事件轮询的持续时间大于等于 timeoutMillis*/) { selectCnt = 1;} else if (/*不正常的次数 selectCnt 达到阈值 512*/) { //重建Select并且SelectionKey重新注册到新Selector上 selector = selectRebuildSelector(selectCnt);}
NioEventLoop 线程的可靠性至关重要,一旦 NioEventLoop 发生阻塞或者陷入空轮询,就会导致整个系统不可用。
注:本文为Netty资料整合,相关资料源自网络。
本文分享自微信公众号 - 大淘宝技术(AlibabaMTT)。
如有侵权,请联系 [email protected] 删除。
本文参与“OSC源创计划”,欢迎正在阅读的你也加入,一起分享。