这一周自动驾驶新闻很劲爆。行业方面,先是地平线港股上市,首日盘中最高点触及40%,再到收盘破发。技术方面长安启源E07发布会上,陶吉也介绍了长安自研的天枢大模型。这一周还有什么其他值得关注的内容?今天就为大家分享下国内最大的自动驾驶社区—『自动驾驶之心知识星球』,欢迎加入

2024最新自动驾驶框架和仿真器综述
本文回顾了开源和商业自动驾驶框架及仿真器,介绍并比较了它们的特点和功能等,还从硬件不足、自动驾驶算法、场景生成、V2X、安全与性能以及联合仿真等角度,提出了AD框架和仿真器在近期未来的有前景的研究方向。
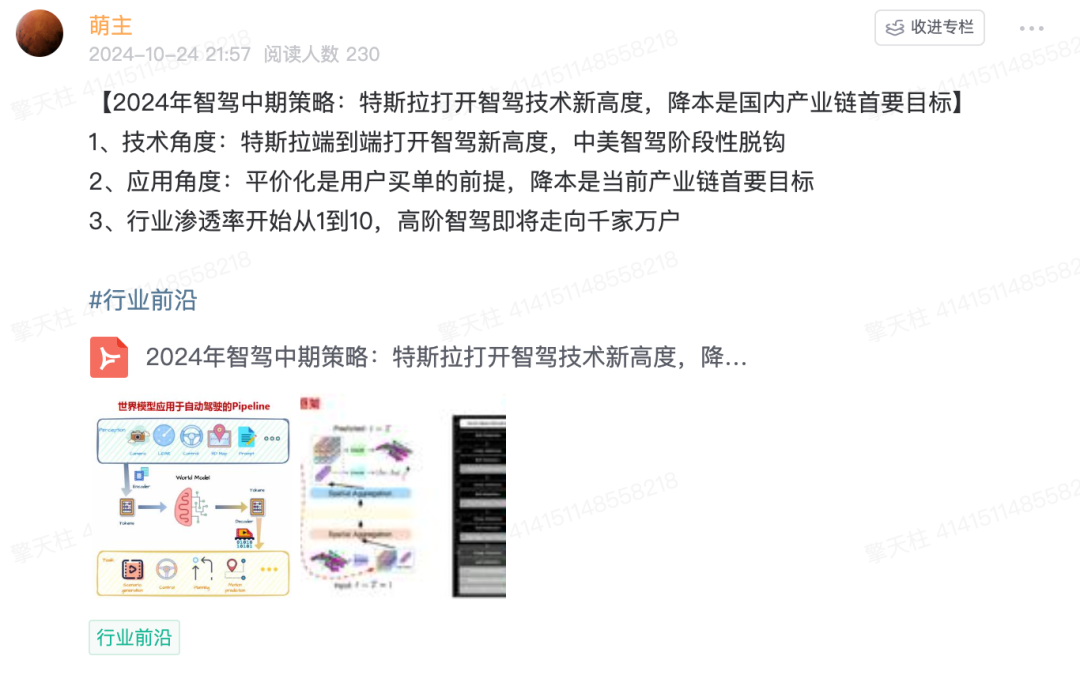
2024年智驾中期策略:特斯拉打开智驾技术新高度,降本是国内产业链首要目标
1、技术角度:特斯拉端到端打开智驾新高度,中美智驾阶段性脱钩
2、应用角度:平价化是用户买单的前提,降本是当前产业链首要目标
3、行业渗透率开始从1到10,高阶智驾即将走向千家万户
YOLOv11架构分析
包括引入C3k2(带有核大小为2的跨阶段部分)模块、SPPF(快速空间金字塔池化)和C2PSA(带有并行空间注意力的卷积块)组件,这些都在多方面提升了模型的性能,例如增强特征提取能力。探讨了YOLOv11在多种计算机视觉任务中的扩展能力,包括目标检测、实例分割、姿态估计和定向物体检测(OBB)。

无人配送、接驳车标准体系及车型特性研究
随着自动驾驶技术在全球范围内不断发展,无人配送、无人接驳商业化落地速度加快,并在北京、上海、深圳等各地智能网联汽车示范区积累了大量运营实践经验。但是这类无人化车型由于无驾驶位、无方向盘等原因,无法被有效纳入现有车型管理体系,导致无公开道路行驶路权。相关法律法规不够完善给无人化车型商业化进程带来阻碍。
相机和Lidar的位置对端到端自动驾驶有什么影响?
本文研究了三个前置 RGB 摄像机和一个激光雷达传感器的位置对端到端自动驾驶性能的影响。此外,还探讨了在训练和测试(即车辆操作)过程中定位不匹配的影响。在传感器位置混合训练的多条件模型在违规评分方面显著地恢复了性能,从而提高了模型在训练和测试期间对传感器不匹配引起的域移位的鲁棒性。

CARLA2Real,这是一个易于使用的公共工具(插件),适用于广泛使用的开源CARLA仿真器
该工具在近实时中增强了CARLA的输出,达到了13帧每秒的帧率,使其视觉风格和真实感与Cityscapes、KITTI和Mapillary Vistas等真实世界数据集相匹配。
Kaninfadet3D: 一种基于非线性特征提取和内在相关的路边相机-激光雷达融合3D 感知模型
方法在TUMTraf交叉口数据集的两个视角中,分别提高了9.87 mAP和10.64 mAP,在TUMTraf V2X协同感知数据集的路边端提高了1.40 mAP。结果表明,Kaninfradet3D能够有效融合特征,展示了KAN在路边感知任务中的应用潜力。
2024年汽车操作系统趋势 及TOP10分析报告
汽车操作系统(简称Car-OS)是运行在异构分布硬件架构上的实时安全平台软件,它提供了一系列的功能框架,这些框架为整车及部件的感知、规划、 控制等功能提供了必要的支持和保障,并向上支撑智能网联汽车生态的软件集合。作为汽车智能计算基础平台的重要组成部分,汽车操作系统是确保汽 车安全、实时和高效运行的重要基础和核心支撑。从类型上来看,汽车操作系统可以分为狭义和广义两种。狭义的汽车操作系统单指系统软件中的操作系统内核部分,广义的汽车操作系统则包含功能软件和系统软件等多层含义,本报告研究对象是广义操作系统。
以上内容均出自『自动驾驶之心知识星球』,近3500人的专业圈子!欢迎扫码加入一起学习:
