1 简介
涉及到了这三大关键技术:ACT、Diffusion Policy、VINN
- 端到端的模仿学习
- 基于Transformer在动作序列上生成模型,动作分块算法。
- 解决现有机器人昂贵且难以做精确任务的问题
- 可以通过定制远程操作接口收集实际演示,进行端到端的模仿学习
2. ENV
- 本机配置:ubuntu20.04,cuda-11.3
2.1 环境配置
# 1. 创建python虚拟环境
conda create -n aloha python=3.8
# 2. 激活虚拟环境
conda activate aloha
# 3. 安装适合cuda的torch
pip install torch==1.11.0+cu113 torchvision==0.12.0+cu113 torchaudio==0.11.0 --extra-index-url https://download.pytorch.org/whl/cu113
# 4 安装detr
## 拉取act源码
git clone https://github.com/agilexrobotics/act-plus-plus.git
cd act-plus-plus
# 4.1 其他依赖
pip install -r requirements.txt
## 4.2 安装detr
cd detr && pip install -v -e .
2.2 simulated environments datasets
You can find all scripted/human demo for simulated environments here. link
下载后, 拷贝到act-plus-plus/data目录下,目录结构如下:
act-plus-plus/data
├── sim_insertion_human
│ ├── sim_insertion_human-20240110T054847Z-001.zip
├── ...
├── sim_insertion_scripted
│ ├── sim_insertion_scripted-20240110T054854Z-001.zip
├── ...
├── sim_transfer_cube_human
│ ├── sim_transfer_cube_human-20240110T054900Z-001.zip
│ ├── ...
└── sim_transfer_cube_scripted
├── sim_transfer_cube_scripted-20240110T054901Z-001.zip
├── ...
3 generate episodes
# 1 运行
python3 record_sim_episodes.py --task_name sim_transfer_cube_scripted --dataset_dir <data save dir> --num_episodes 50
# --dataset_dir 保存路径
# 2 以sim_transfer_cube_scripted为样例,运行
python3 record_sim_episodes.py --task_name sim_transfer_cube_scripted --dataset_dir data/sim_transfer_cube_scripted --num_episodes 10
# 2.1 实时渲染
python3 record_sim_episodes.py --task_name sim_transfer_cube_scripted --dataset_dir data/sim_transfer_cube_scripted --num_episodes 10 --onscreen_render
# 2.2 运行后终端打印如下
ube_scripted --num_episodes 10
episode_idx=0
Rollout out EE space scripted policy
episode_idx=0 Failed
Replaying joint commands
episode_idx=0 Failed
Saving: 0.9 secs
episode_idx=1
Rollout out EE space scripted policy
episode_idx=1 Successful, episode_return=57
Replaying joint commands
episode_idx=1 Successful, episode_return=59
Saving: 0.6 secs
...
Saved to data/sim_transfer_cube_scripted
Success: 2 / 10
- 终端显示episodes10个, 成功2个, 文件目录如下:
act-plus-plus
└── sim_transfer_cube_scripted
├── episode_0.hdf5
├── episode_1.hdf5
├── episode_2.hdf5
├── episode_3.hdf5
├── episode_4.hdf5
├── episode_5.hdf5
├── episode_6.hdf5
├── episode_7.hdf5
├── episode_8.hdf5
└── episode_9.hdf5
4 visualize episodes
python3 visualize_episodes.py --dataset_dir <data save dir> --episode_idx 0
python3 visualize_episodes.py --dataset_dir data/sim_transfer_cube_scripted --episode_idx 9
# --episode_idx 场景索引号
# 终端打印
# Saved video to: data/sim_transfer_cube_scripted/episode_0_video.mp4
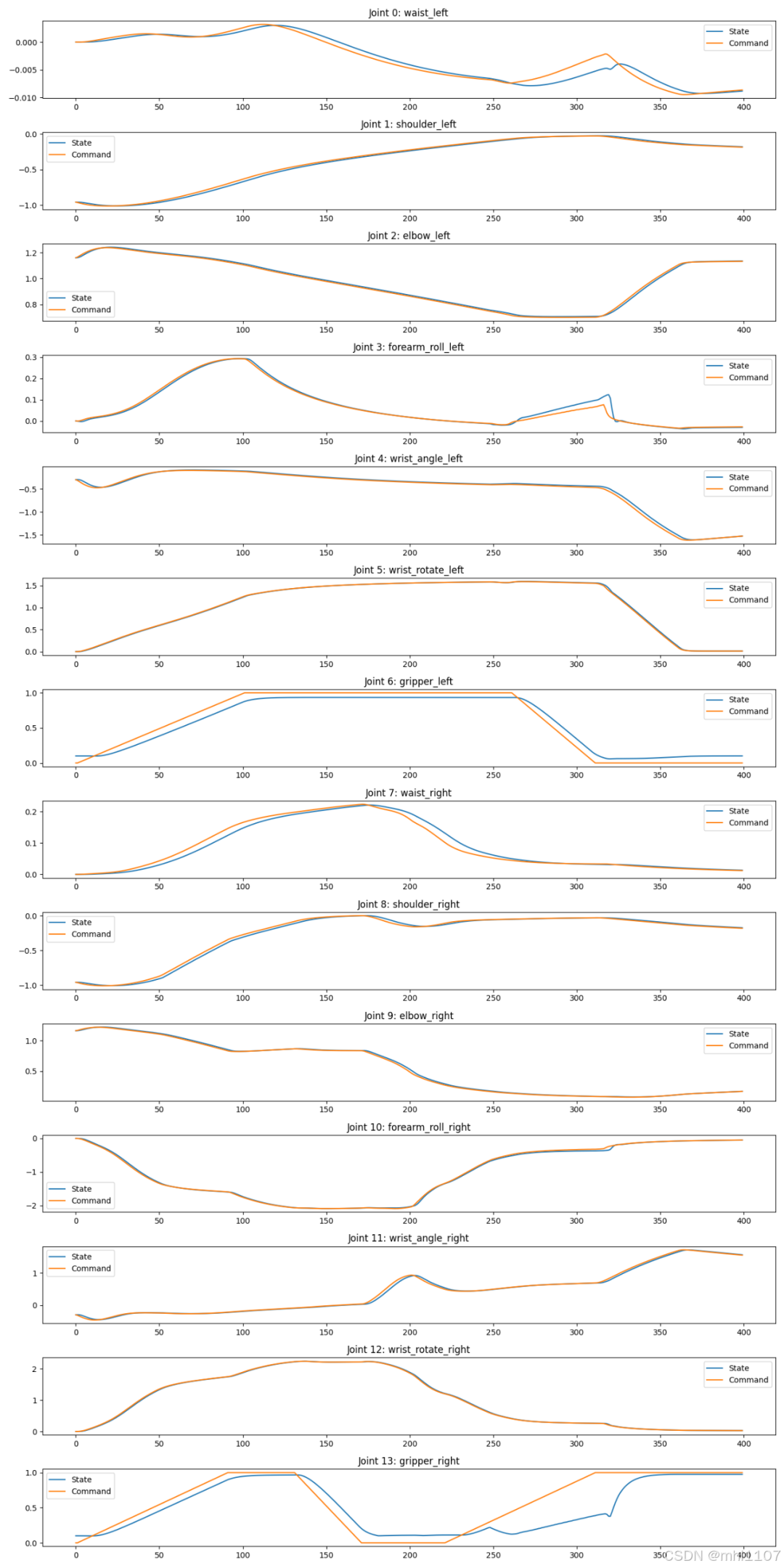
# Saved qpos plot to: data/sim_transfer_cube_scripted/episode_0_qpos.png
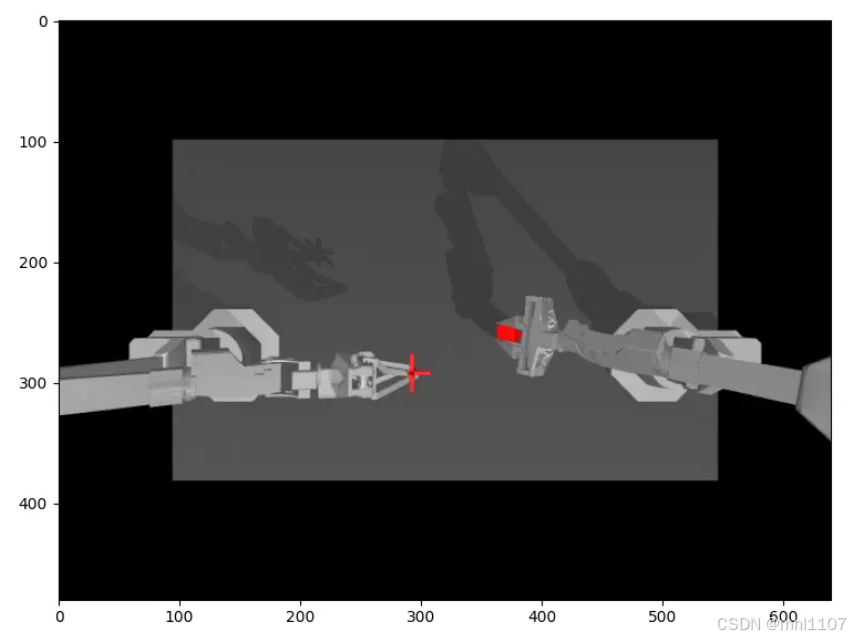
episode-video

episode-qpos
5 train
python3 imitate_episodes.py --task_name sim_transfer_cube_scripted --ckpt_dir <ckpt dir> --policy_class ACT --kl_weight 10 --chunk_size 100 --hidden_dim 512 --batch_size 8 --dim_feedforward 3200 --num_epochs 2000 --lr 1e-5 --seed 0
# 使用
python3 imitate_episodes.py --task_name sim_transfer_cube_scripted --ckpt_dir trainings --policy_class ACT --kl_weight 1 --chunk_size 10 --hidden_dim 512 --batch_size 1 --dim_feedforward 3200 --lr 1e-5 --seed 0 --num_steps 2000
# 训练时会提示下面内容,由于没有W&B account,直接选择3
wandb: (1) Create a W&B account
wandb: (2) Use an existing W&B account
wandb: (3) Don't visualize my results
wandb: Enter your choice:
- 训练完成后,权重会保存到trainings目录结果如下:
trainings
├── config.pkl
├── dataset_stats.pkl
├── policy_best.ckpt
├── policy_last.ckpt
└── policy_step_0_seed_0.ckpt
5 evaluate
# 1 evaluate the policy 加上--onscreen_render实时渲染参数
python3 imitate_episodes.py --eval --task_name sim_transfer_cube_scripted --ckpt_dir trainings --policy_class ACT --kl_weight 1 --chunk_size 10 --hidden_dim 512 --batch_size 1 --dim_feedforward 3200 --lr 1e-5 --seed 0 --num_steps 20 --onscreen_render
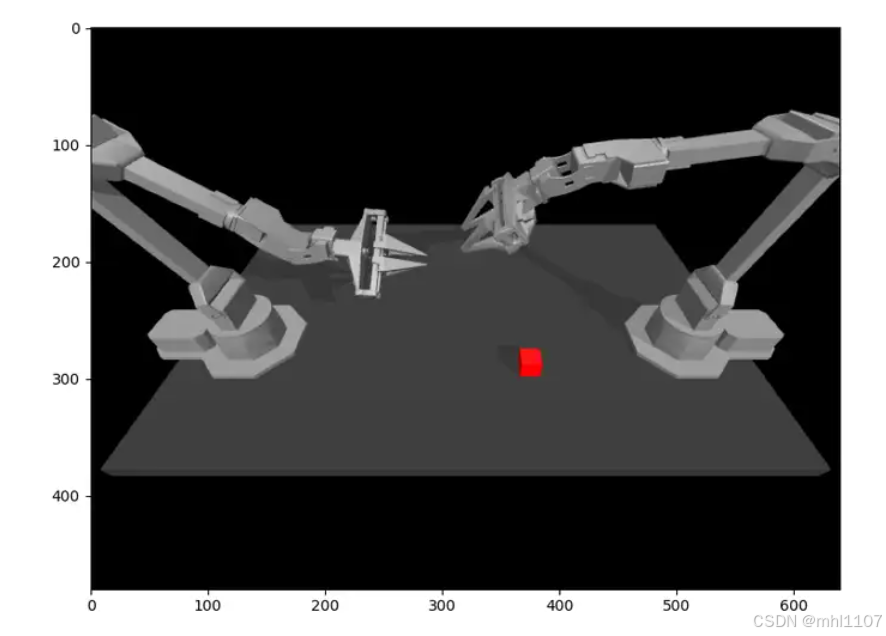
episode-qpos
学习交流访: