
简介:GD32307C_EVAL.rar 提供了一个资源包,包含针对GD32307C微控制器的多个实时操作系统移植版本,如FreeRTOS、rt-thread、uCos_II、uCosIII、RTX和LiteOS。开发者可以通过这些资源快速评估不同RTOS在GD32307C平台上的性能表现,为选择合适的RTOS进行嵌入式系统开发提供便利。 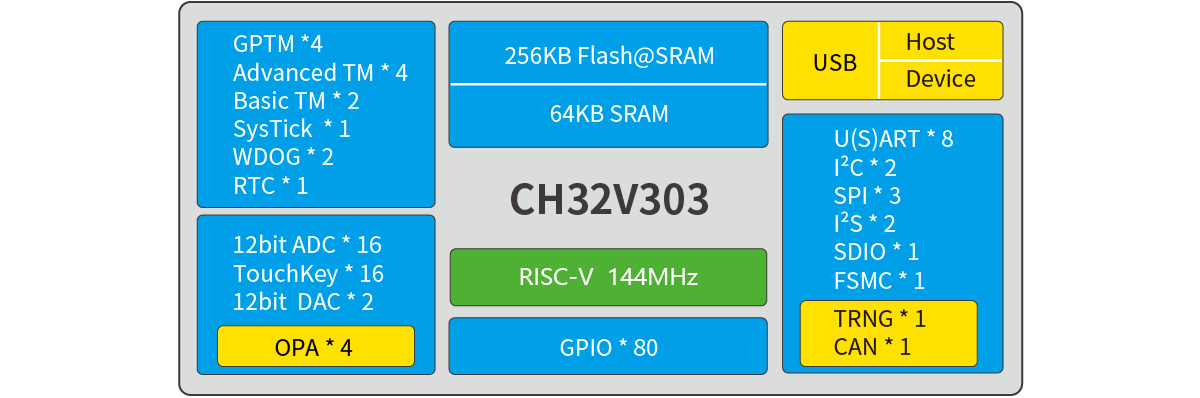
1. GD32307C微控制器开发资源概述
在嵌入式系统的开发过程中,选择一个合适的微控制器(MCU)是至关重要的一步。GD32307C微控制器以其丰富的外设资源、灵活的扩展性和高效能的处理能力在市场中占有一席之地。本章节旨在为开发者提供一个关于GD32307C微控制器的基础概览,涵盖其硬件特性、开发环境、以及可利用的软件资源。
1.1 GD32307C微控制器硬件特性
GD32307C微控制器属于GigaDevice的GD32系列,它采用了高性能的32位ARM®Cortex®-M3处理器。这款处理器不仅拥有强大的计算能力,还具备丰富的外设接口,例如多个UART、I2C、SPI、CAN总线和PWM通道。GD32307C特别适合于复杂的I/O密集型应用,比如工业控制、消费类电子、仪器仪表等。同时,它还拥有高达128KB的闪存和20KB的SRAM,可以支持较为复杂的嵌入式应用。
1.2 开发环境和工具
对于GD32307C微控制器的开发,GigaDevice提供了官方的开发套件GD32E10x Standard Peripherals Library和软件开发工具链,包括Keil MDK-ARM、IAR Embedded Workbench等。这些工具链通常提供了丰富的文档和示例程序,有助于开发者快速上手。此外,社区和第三方也提供了大量的开发资源,例如MCUopen开发平台,这个开放源代码的生态系统旨在降低开发者入门门槛,提供灵活的软件组件和开发工具。
1.3 可利用的软件资源
对于希望快速开发应用的开发者,GigaDevice官方提供的软件资源库(GD32 Software Package)是一个很好的起点。这些资源包括各种中间件、驱动程序、以及示例应用,它们经过严格测试,能够确保稳定性和可靠性。开发者可以根据自己的需求选择相应的软件包,进行裁剪或扩展,以满足特定的功能需求。另外,社区贡献的开源项目也是一个宝贵的资源,开发者可以在遵循相应的开源协议下,直接使用或者作为参考,学习其设计和实现。
这一章节为读者提供了GD32307C微控制器的基础信息,包括其硬件特性和软件开发环境的介绍,旨在为后续的开发实践和深入探讨打下坚实的基础。接下来的章节将深入探讨不同RTOS移植版本的分析与对比,为读者提供更具体的技术细节和操作指导。
2. 多种RTOS移植版本的分析与对比
2.1 RTOS移植版本概览
2.1.1 主流RTOS介绍
RTOS(Real-Time Operating System)是实时操作系统,专门为了在有限的时间内完成任务而设计。随着物联网和嵌入式技术的发展,RTOS在各种设备上的应用越来越广泛。主要的RTOS包括FreeRTOS、RT-Thread、Zephyr、uC/OS-II、VxWorks等,它们各自具有不同的特点和优势。
- FreeRTOS 是目前最为流行的开源RTOS之一,它适用于资源受限的微控制器。其轻量级和可裁剪性使其成为小型嵌入式系统的首选。
- RT-Thread 是一个多线程的实时操作系统,它具有丰富的组件和模块,支持广泛的应用场景。RT-Thread的一个显著特点是高性能和高可靠性的实时性。
- Zephyr 是由Linux基金会支持的微内核RTOS,它设计用于物联网设备,支持多种硬件平台和处理器架构。
- uC/OS-II 是一个具有模块化、可裁剪的实时操作系统,广泛应用于商业和工业领域。它提供了高度的稳定性和可靠性,但可能需要较大的内存空间。
- VxWorks 是Wind River开发的商业RTOS,具有高性能和实时性,广泛应用于航空、通信等关键领域。
不同的RTOS适用于不同类型的项目,选择合适的RTOS移植版本需要综合考虑项目的需求、硬件资源限制、预算和开发维护的便利性。
2.1.2 移植版本的选择依据
选择移植哪个版本的RTOS,首先要明确几个关键点:
- 功能需求 :项目是否需要高级的网络功能、图形用户界面或其他特定服务。
- 资源限制 :评估目标硬件平台的内存、处理能力和存储空间。
- 实时性要求 :确定系统的响应时间、任务调度和中断处理的实时性能需求。
- 成本预算 :选择在项目预算范围内既能满足功能需求又能提供最佳性价比的RTOS。
- 开发和维护 :选择社区活跃、文档齐全的RTOS,以便于开发和长期维护。
例如,若项目需要一个轻量级且拥有丰富社区支持的RTOS,FreeRTOS可能是最佳选择。相反,如果项目对实时性能有极高的要求,并且预算允许,那么VxWorks可能更为合适。
2.2 移植过程详解
2.2.1 环境搭建与配置
移植RTOS到微控制器上,首先需要搭建开发环境。对于嵌入式开发,一个典型的开发环境包括交叉编译器、仿真器、调试器和源代码管理工具。以GD32F30x系列微控制器为例,通常使用基于Eclipse的μVision IDE进行开发。
- 交叉编译器 :安装适用于目标微控制器架构的交叉编译器,例如GCC ARM Embedded。
- 仿真器和调试器 :配置仿真器和调试器以确保代码能够正确加载和调试。通常微控制器厂商会提供相应的软件工具,比如ST-Link、J-Link等。
- 源代码管理工具 :使用如Git这样的版本控制工具管理RTOS的源代码和项目文件。
开发环境搭建好之后,接下来是下载目标RTOS的源代码。大多数RTOS都会提供下载链接或仓库,根据项目需求选择合适的版本进行下载。
2.2.2 移植步骤和注意事项
移植RTOS到特定的硬件平台,大致可以分为以下几个步骤:
- 下载并解压RTOS源码 :根据选择的RTOS版本,从官方网站或官方仓库获取源代码。
- 配置RTOS :使用RTOS提供的配置工具或手动修改配置文件,选择适合的内核功能和组件。
- 修改平台相关代码 :修改RTOS的启动文件、中断处理代码等平台相关部分,以适配特定微控制器的硬件特性。
- 编写应用代码 :根据项目需求编写业务逻辑代码,并将其与RTOS集成。
- 编译和测试 :编译整个项目并进行单元测试和系统测试。
在移植过程中,以下几点需要特别注意:
- 内存管理 :确保为RTOS预留足够的RAM空间,以及正确管理堆和栈空间,避免出现溢出。
- 中断管理 :合理配置中断优先级和中断服务例程,确保系统的响应性和实时性。
- 时钟管理 :配置和优化时钟设置,确保系统的时序和节拍。
- 调试和验证 :使用调试工具进行动态调试,验证RTOS的实时性能和稳定性。
2.3 移植效果评估
2.3.1 系统性能测试方法
为了评估RTOS移植后的性能,需要进行一系列的系统性能测试。这些测试可以帮助开发人员了解RTOS在目标硬件上的表现,包括任务切换时间、中断响应时间、内存使用情况等。
- 任务切换时间 :测量在不同优先级任务之间切换所需的时间,以评估实时性。
- 中断响应时间 :模拟外部事件触发中断,记录中断服务例程的响应时间。
- 内存使用情况 :分析RTOS启动后,堆和栈的内存使用情况,检查是否有内存泄漏。
- 任务调度测试 :通过创建不同优先级的任务,验证任务调度的公正性和效率。
测试方法通常包括使用内置的RTOS性能分析工具、第三方测试工具,或是自行编写测试代码来测量上述性能参数。
2.3.2 系统稳定性与兼容性分析
移植后的RTOS是否稳定,是否能兼容目标硬件平台,这些都是需要评估的关键点。系统稳定性可以从以下几个方面进行分析:
- 长时间运行测试 :让系统持续运行一段时间,检查是否有错误或者异常情况发生。
- 极端条件测试 :模拟极端工作条件,比如高温度、高振动,评估系统稳定性。
- 软硬件兼容性测试 :确保RTOS能在不同的硬件版本上正常运行。
在测试过程中,需要记录所有异常情况,并尝试找到问题的根源。一旦发现稳定性问题,就需要根据RTOS的日志和调试信息进行调试,并对源代码进行修改以解决问题。
通过上述测试,可以对移植的RTOS有一个全面的认识,有助于后续对RTOS进行性能优化和问题修正。
3. FreeRTOS移植与应用实践
3.1 FreeRTOS移植基础
FreeRTOS 是一个源码开放、可移植、可裁剪、调度策略丰富的实时操作系统内核,广泛应用于微控制器和嵌入式系统中。其设计的目标是占用最小的RAM和ROM资源,提供强大、稳定、易用的实时性能。
3.1.1 FreeRTOS核心概念和组件
FreeRTOS 的核心组件包括任务(Tasks)、队列(Queues)、信号量(Semaphores)、互斥量(Mutexes)、事件组(Event Groups)、软件定时器(Software Timers)等。每个任务在操作系统中被视为一个独立的线程,拥有自己的堆栈空间,并根据优先级进行调度。队列用于任务间或中断与任务间的通信和同步。信号量和互斥量提供了一种同步机制,防止多任务同时访问同一资源时产生冲突。软件定时器则用于需要时间管理功能的任务。
3.1.2 移植前的准备工作
在进行FreeRTOS移植之前,需要做好以下准备工作: - 确保目标硬件平台的开发环境已经搭建完成,包含交叉编译工具链等。 - 获取FreeRTOS源代码,通常可以从官方网站或者Git仓库中克隆最新的代码库。 - 阅读目标硬件平台的技术手册,了解具体的内存架构、处理器指令集和特殊功能寄存器(SFR)等信息。 - 准备一个适合的硬件平台,或者在仿真器上进行调试。
3.2 FreeRTOS应用开发
FreeRTOS 提供了丰富的API接口,开发者可以利用这些API创建和管理任务、队列、信号量等。
3.2.1 创建任务和队列
在FreeRTOS中创建任务的基本步骤如下:
#include "FreeRTOS.h"
#include "task.h"
void vTaskFunction(void *pvParameters) {
// 任务代码
}
int main(void) {
// 创建一个任务
xTaskCreate(
vTaskFunction, // 任务函数
"Task", // 任务名称
128, // 栈大小
NULL, // 传递给任务函数的参数
1, // 优先级
NULL // 任务句柄
);
// 启动调度器
vTaskStartScheduler();
// 如果这里返回,则表示没有足够的堆栈空间创建启动调度器
while(1);
}
创建队列的API调用如下:
QueueHandle_t xQueueCreate(uint32_t uxQueueLength, uint32_t uxItemSize);
其中 uxQueueLength 表示队列能够容纳的最大项数, uxItemSize 表示每个队列项的大小,单位是字节。
3.2.2 信号量和互斥锁的使用
信号量和互斥锁在FreeRTOS中主要通过以下两个函数创建:
SemaphoreHandle_t xSemaphoreCreateBinary(void);
SemaphoreHandle_t xSemaphoreCreateMutex(void);
xSemaphoreCreateBinary 创建一个二进制信号量,而 xSemaphoreCreateMutex 创建一个互斥量。在使用信号量或互斥锁之前需要先创建它们,并且在任务中通过 xSemaphoreTake 和 xSemaphoreGive 等函数来获取和释放信号量。
3.3 FreeRTOS性能优化
FreeRTOS提供了灵活的内存管理机制,内存分配可以通过动态堆内存分配或静态内存分配来完成。
3.3.1 内存使用和管理策略
动态内存分配通常使用 pvPortMalloc 和 vPortFree 进行,这两个函数在默认情况下会调用标准的C库函数 malloc 和 free ,因此需要确保目标平台支持这些函数。静态内存分配则需要在编译时就确定好所需的内存大小,这可以通过 #define 指定。
在处理内存管理时,需要考虑以下策略: - 尽可能使用静态内存分配,以减少内存碎片问题。 - 如果使用动态内存,确保在系统运行时不会频繁进行内存分配和释放操作,这可能会导致性能下降。 - 使用内存池来管理小块内存分配,以提高分配效率和减少内存碎片。
3.3.2 调试和问题诊断
调试FreeRTOS应用程序时,可以使用内建的函数,例如 vTaskList 和 vTaskGetRunTimeStats 来获取当前任务的列表和统计信息。对于更深入的调试,需要使用跟踪和性能分析工具,比如 FreeRTOS 的 Trace Facility。它允许记录任务的切换、队列事件和其他重要事件,并且可以通过图形化界面进行分析,帮助开发者找到性能瓶颈。
通过配置编译器的调试信息输出选项,可以在代码中插入断点、监视变量或者单步执行,以便于发现和修复代码中的逻辑错误。另外,FreeRTOS 官方提供的 API 可以获取实时操作系统内核的状态信息,如当前运行的任务、堆栈使用情况等,这些信息对于优化系统性能和资源使用非常有帮助。
4. rt-thread中间件服务与应用案例
4.1 rt-thread中间件概述
4.1.1 中间件的架构和组件
rt-thread 是一个针对嵌入式系统的实时操作系统(RTOS),它不仅包含了传统RTOS的基本功能,而且在中间件方面也提供了丰富的服务。rt-thread 的架构设计允许它在从低端资源受限的MCU到高端多核处理器的广泛硬件平台上运行。
rt-thread 的中间件架构主要由以下几个层次组成:
- 内核层:负责提供实时操作系统的功能,包括线程调度、同步、内存管理、时间管理等。
- 中间件层:为上层应用提供通用的服务,如文件系统、网络协议栈、设备虚拟化层等。
- 驱动层:提供与硬件直接交互的驱动程序,包括I/O 设备驱动、芯片级驱动等。
- 应用层:允许开发者根据需求实现具体的应用程序逻辑。
rt-thread 中间件的组件不仅包括了上述核心架构中提到的组件,还涉及到了一系列可选组件,如图形用户界面(GUI)、低功耗管理、数据加密、物联网安全等。
4.1.2 中间件服务的启动与配置
rt-thread 中间件服务的启动和配置是通过配置文件 rtconfig.h 和项目特定的makefile文件来完成的。 rtconfig.h 文件中定义了系统的基本配置选项,包括是否启用某个中间件组件。
/* rtconfig.h */
#define RT_USING_GPIO /* 使用GPIO功能 */
#define RT_USING_UART /* 使用UART功能 */
#define RT_USING_HTTPSERVER /* 使用HTTP Server功能 */
// 更多组件启用定义...
在启用特定中间件组件后,需要编译链接相应的源文件。这一过程通常在makefile中通过添加特定的模块路径来完成。例如:
# Makefile
# 配置项目中启用的中间件模块
APP_MMOD += -mrt-thread
APP_MMOD += -mrtgui
APP_MMOD += -mhttpserver
# 更多模块编译路径...
# 编译器选项
CFLAGS += -I$(RTT_ROOT)/include
LDFLAGS += -L$(RTT_ROOT)/lib
在这一部分,我们介绍了rt-thread 中间件的架构和如何在项目中进行启动与配置。接下来,我们将深入探讨rt-thread 应用开发的细节。
4.2 rt-thread应用开发
4.2.1 设备驱动开发流程
在rt-thread 中开发设备驱动通常遵循以下流程:
-
定义设备驱动接口 :根据硬件设备特性定义驱动接口函数,这些函数包括初始化、打开、读取、写入、关闭等。
c /* 示例:定义一个简单的设备驱动接口 */ static rt_err_t device_open(rt_device_t dev, rt_uint16_t oflag) { // 设备打开操作 } -
实现设备驱动操作 :在驱动程序中实现上述定义的接口函数。
c static rt_err_t device_read(rt_device_t dev, rt_off_t pos, void* buffer, rt_size_t size) { // 实现设备读取操作 }
- 注册设备驱动 :将驱动程序注册到rt-thread 的设备管理层中。
c rt_device_t device_init(void) { rt_device_t dev; dev = rt_device_create(RT_DEVICE_FLAG_RDWR, "device0"); rt_device_register(dev, "device", RT_DEVICE_FLAG_RDWR, NULL); return dev; }
- 设备使用 :通过rt-thread 提供的标准接口进行设备的打开、读写操作。
c int main(void) { rt_device_t device = device_init(); rt_device_open(device, RT_DEVICE_FLAG_RDWR); rt_device_read(device, 0, buffer, size); rt_device_close(device); return 0; }
- 驱动的配置与启用 :在
rtconfig.h文件中启用驱动,并在makefile文件中确保编译链接。
4.2.2 网络服务和协议栈的集成
rt-thread 提供了一个模块化设计的网络框架,用户可以灵活地集成所需的各种网络协议栈。下面介绍了集成网络服务和协议栈的基本步骤:
- 启用网络栈 :在
rtconfig.h文件中启用网络栈模块,如TCP/IP、HTTP等。
c #define RT_USING_DFS #define RT_USING_LWIP /* 启用LwIP网络协议栈 */
- 配置网络设备 :设置网络设备的IP地址、子网掩码、网关等信息。
c #include <lwip/etharp.h> #include <lwip/init.h> struct ip_addr ipaddr, netmask, gw; IP4_ADDR(&ipaddr, 192, 168, 1, 10); IP4_ADDR(&netmask, 255, 255, 255, 0); IP4_ADDR(&gw, 192, 168, 1, 1); void lwip_init(void) { lwip_init(); netif_add(&xnetif, &ipaddr, &netmask, &gw, RT_NULL, ðernetif_init, ðernet_input); netif_set_default(&xnetif); netif_set_up(&xnetif); }
- 创建网络线程 :启动一个专门的线程来处理网络事件。
c #include <lwip/err.h> #include <lwip/sys.h> static rt_thread_t netif_thread = RT_NULL; static void lwip_thread(void *parameter) { while (1) { sys_check_timeouts(); rt_thread_mdelay(20); } } int main(void) { lwip_init(); netif_thread = rt_thread_create("lwip", lwip_thread, RT_NULL, 2048, 5, 10); if (netif_thread != RT_NULL) rt_thread_startup(netif_thread); return 0; }
- 配置网络应用 :配置诸如HTTP服务器、Telnet服务等网络应用。
c #include <dfs_posix.h> #include <dfs_file.h> #include <dfs_fs.h> #include <httpd.h> int dfs_init(void) { dfs_init(); dfs_mount("flash", "/disk", "elm", 0, 0); dfs_mkfs("elm", "/disk"); httpd_system_init(); return 0; }
本节中,我们探讨了rt-thread 中的设备驱动开发流程以及网络服务和协议栈的集成方法。接下来,我们将通过案例分析展示rt-thread 在实际项目中的应用。
4.3 rt-thread实践案例分析
4.3.1 物联网项目案例
物联网项目中,rt-thread 的实时性、低功耗以及丰富的中间件组件使得它成为一个理想的选择。以下是一个基于rt-thread 的物联网项目的案例分析:
物联网项目概述
本项目旨在通过rt-thread 实现一个小型的智能农业监控系统,该系统可实时监测土壤湿度、温度和光照,并将数据通过无线网络发送到云平台。
实现步骤
- 硬件选型 :选择支持rt-thread 的MCU和传感器模块。
- 环境搭建 :搭建rt-thread 开发环境并进行编译工具链配置。
- 驱动开发 :开发土壤湿度、温度传感器和无线通信模块的驱动程序。
- 中间件集成 :集成rt-thread 的网络协议栈、HTTP服务器和文件系统。
- 应用实现 :编写应用程序来处理传感器数据的采集、存储和网络传输。
代码实现
/* 传感器数据采集函数 */
void measure_sensors(void)
{
soil_moisture = read_soil_moisture_sensor();
temperature = read_temperature_sensor();
light_intensity = read_light_intensity_sensor();
}
/* 网络数据传输函数 */
void send_data_to_cloud(void)
{
struct http_request req;
char data_to_send[100];
/* 将传感器数据格式化为字符串 */
snprintf(data_to_send, sizeof(data_to_send), "Soil Moisture: %d, Temperature: %d, Light Intensity: %d", soil_moisture, temperature, light_intensity);
/* 初始化HTTP请求 */
http_init_request(&req, "***");
req.type = HTTP_REQ_POST;
req.content_type = "application/json";
req.body = data_to_send;
/* 发送HTTP请求 */
http_request_send(&req);
}
4.3.2 实时性能评估与调优
实时性能评估
在物联网项目中,实时性能是非常重要的。评估rt-thread 实时性能的常用方法包括:
- 使用系统提供的计时器服务来测量任务切换和中断响应时间。
- 通过记录系统运行日志,使用时间戳来分析任务执行和调度延迟。
性能调优
性能调优主要从以下几个方面展开:
- 任务优先级调整 :确保关键任务和中断服务程序拥有较高的优先级。
- 内存优化 :减少动态内存分配,使用静态内存池或内存池管理。
- 中断服务优化 :合理配置中断优先级,禁用不必要的中断服务。
- 代码优化 :优化关键代码段,减少不必要的分支和循环。
/* 优化内存分配 */
#define STACK_SIZE 1024
static rt_uint8_t thread_stack[STACK_SIZE];
static struct rt_thread thread;
rt_thread_init(&thread,
"sensor_thread",
sensor_thread_entry,
RT_NULL,
thread_stack,
sizeof(thread_stack),
10, 20);
rt_thread_startup(&thread);
/* 内存池创建 */
#define MEM_POOL_SIZE 1024
static rt_uint8_t mem_pool[MEM_POOL_SIZE];
static struct rt_mempool mem_pool_obj;
void mem_pool_init(void)
{
rt_mempool_init(&mem_pool_obj, "mempool", mem_pool, MEM_POOL_SIZE, 32);
}
本节中,我们通过物联网项目的案例分析,介绍了rt-thread 在实际应用中的集成和优化方法。rt-thread 作为一款强大的实时操作系统,具有丰富的中间件组件和灵活的模块化设计,非常适合应用于各种实时性和资源受限的嵌入式系统。
以上就是本章节的全部内容,希望能帮助读者更好地了解rt-thread 中间件服务的概述、应用开发流程以及实际案例分析。通过本章的学习,开发者可以更加高效地利用rt-thread 提供的中间件服务,开发出高性能的嵌入式应用。
5. uCos_II与uCosIII的比较与选择
5.1 uCos_II与uCosIII核心差异
5.1.1 内核设计与扩展性对比
uCos-II (MicroC/OS-II) 是一个实时操作系统内核,适用于嵌入式系统,并被广泛用于教学和商业项目。自从它的发布,其后续版本uCos-III (MicroC/OS-III) 随着时间的发展,引入了许多新特性。核心设计上的差异体现在uCos-II以静态优先级调度为基础,而uCos-III除了静态优先级还支持时间片轮转调度。
在扩展性方面,uCos-II尽管提供了一定程度的模块化,但其模块选择受限。uCos-III在设计时着重提升了模块化,允许开发者根据需要启用或禁用特定功能,提供了更大的灵活性。uCos-III支持动态内存管理,并通过内存分区和任务堆栈管理来优化资源使用。
5.1.2 内存管理与调度策略差异
内存管理方面,uCos-II采用静态内存分配,每个任务的堆栈大小在编译时确定,这对于资源受限的嵌入式系统是个优势,因为它避免了内存碎片化的问题。然而,这也意味着需要开发者准确预测每个任务的最大堆栈需求。
与之相比,uCos-III引入了动态内存分配,提供了内存分区的概念,允许堆栈和其它内存块的动态分配。同时,uCos-III具备了时间片轮转调度机制,可以保证每个任务都有机会获得CPU时间,这对于实现公平调度和处理I/O密集型任务特别有用。
graph TD;
A[uCos-II 内存管理] -->|静态分配| B[编译时确定堆栈大小];
A -->|避免内存碎片| C[适合资源受限系统];
D[uCos-III 内存管理] -->|动态内存分配| E[内存分区];
D -->|支持时间片轮转调度| F[提高调度公平性];
5.2 uCos版本选择策略
5.2.1 不同应用场景下的考量
当选择合适的uCos版本时,开发者必须考虑其应用场景。例如:
- 如果项目资源极为有限,且任务结构相对简单,uCos-II可能是更好的选择。它的静态内存管理机制和较小的代码基使得它在空间受限的系统中更为适用。
- 如果项目需要高度的可配置性和高级功能,uCos-III提供了更好的支持。例如,需要支持多核或对任务调度和时间确定性有更高要求的应用,uCos-III都能提供更好的支持。
5.2.2 开发资源和维护成本分析
在选择uCos版本时,还需要考虑开发资源和预期的维护成本。uCos-II由于其相对简单的结构和已有的大量文档与社区支持,可能会使得开发者的入门门槛较低。然而,随着硬件技术的发展和应用需求的提高,uCos-II可能在某些情况下显得不够灵活。
uCos-III由于其更高级的特性,可能需要开发者投入更多的时间来学习和掌握。但长远来看,这些高级特性能够帮助开发者构建更加健壮和高效的系统,可能会降低长期的维护成本。
5.3 uCos版本升级指南
5.3.1 从uCos_II到uCosIII的迁移路径
对于那些已经在使用uCos-II并且考虑升级到uCos-III的项目,迁移路径需要细致规划。首先,应该评估现有系统的资源使用情况,确认是否有足够的资源支持uCos-III的内存和任务管理需求。
其次,开发者需要熟悉uCos-III的新特性和API变化。这一过程中,开发团队可能需要阅读uCos-III的官方文档,参与相关的培训,甚至可能需要编写一些适配代码来处理API变更带来的影响。
5.3.2 兼容性问题和解决方案
升级到uCos-III可能会遇到的兼容性问题,比如现有的任务可能需要调整以适应动态内存管理。uCos-III新增了任务控制块(TCB),需要使用新的API来进行任务创建和管理。
在处理兼容性问题时,开发者可以通过逐步替换的方式,将代码库逐渐从uCos-II迁移到uCos-III。可以采用条件编译指令来区分不同版本的代码,确保在完全切换到uCos-III之前系统的稳定性。
#ifdef UCOS_III
// uCos-III 的代码
#else
// uCos-II 的代码
#endif
在代码中,通过这样的编译时条件判断,可以保持同一项目中对uCos版本的兼容。这通常需要仔细的设计,以确保系统的稳定性和持续的操作。
5.3.3 实际操作案例
下面是一个简化的例子,假设有一个任务需要创建,这个任务在uCos-II和uCos-III中的实现略有不同。
在uCos-II中,任务创建可能如下所示:
#include "includes.h"
void Task(void *p_arg) {
// Task code goes here
}
int main(void) {
OSInit(); // uCos-II初始化
OSTaskCreate(Task, // Task function
0, // Argument
(void *).TaskStkBase, // Stack base
5); // Task priority
// 其他初始化代码...
OSStart(); // 开始多任务处理
}
在uCos-III中,创建任务的代码会有所不同,如下面的示例所示:
#include "os.h"
void Task(void *p_arg) {
// Task code goes here
}
int main(void) {
OSInit(); // uCos-III 初始化
CPU_STK TASK_STK[TASK_STK_SIZE]; // 定义任务堆栈
OS_TCB TASK_TCB; // 定义任务控制块
// 配置任务堆栈和任务控制块...
OSTaskCreateExt(Task,
0,
&TASK_STK[TASK_STK_SIZE - 1],
5,
0,
&TASK_STK[0],
TASK_STK_SIZE,
(OS_STK *)0,
OS_TASK_OPT_NONE);
// 其他初始化代码...
OSStart(); // 开始多任务处理
}
通过以上代码示例,可以看到,尽管API调用的名称相似,但在两个版本中,函数的参数和功能实现有所不同。迁移时需要对现有代码进行相应的修改,以适配新的API。
6. 代码片段、图表以及对于RTX内核特性和μVision IDE集成的深入探讨。
# 第六章:RTX与μVision IDE集成深度应用
## 6.1 RTX内核特性与集成优势
### RTX内核的特点和架构
RTX,作为ARM Keil的实时内核解决方案,为基于ARM处理器的嵌入式应用提供了高性能、低功耗的实时操作系统服务。RTX内核遵循实时操作系统的标准,并提供抢占式多任务处理机制。其特点包含:
- 小巧的内存占用:RTX内核对于系统资源的要求较低,非常适合内存受限的嵌入式设备。
- 灵活的任务管理:RTX支持多达255个任务,每个任务有不同的优先级,确保关键任务的实时性。
- 互斥和信号量机制:支持同步和互斥机制,确保多任务环境下的数据安全和共享资源管理。
- 系统钩子函数:用户可编写自定义的钩子函数,以实现系统事件的监控和特定行为的触发。
### μVision IDE集成的优势
μVision集成开发环境是针对ARM处理器的一体化开发工具,其与RTX内核的集成提供了以下优势:
- 用户友好的配置界面:μVision IDE为RTX内核配置提供了图形化界面,简化了启动、管理任务和设置中断优先级等操作。
- 强大的调试工具:μVision与RTX的结合提供了强大的调试工具,能够实时监视任务状态、资源使用以及系统性能。
- 代码编辑与分析:集成开发环境还提供代码编辑、编译、下载以及实时运行和调试功能。
## 6.2 RTX在μVision中的配置与应用
### RTX的安装和配置流程
在安装RTX之前,确保已安装了兼容版本的μVision IDE和相应的ARM编译器。安装和配置RTX的基本步骤如下:
1. 打开μVision IDE,选择`Project`菜单下的`Manage` > `Components` > `Pack Installer`。
2. 在`Pack Installer`窗口中,搜索并安装RTX组件。
3. 创建或打开一个项目,将RTX的源代码文件(通常位于`ARM/Rtx/Lib`目录下)添加到项目中。
4. 在项目设置中,配置`Target` > `Options` > `Target`标签,确保已经勾选了RTX内核支持选项。
### RTX任务管理和资源分配
RTX任务管理和资源分配是通过编程实现的。以下是一个简单的代码示例,展示如何在RTX中创建和启动一个任务:
```c
#include "RTX_lib.h"
void Task1(void* p) {
while (1) {
// Task 1 code
}
}
int main(void) {
osMutexDef(myMutex);
osMutexId myMutexId;
osThreadId tid1;
// 创建互斥锁
myMutexId = osMutexCreate(osMutex(myMutex));
// 创建任务1
tid1 = osThreadCreate(osThread(Task1), NULL);
// 其他初始化代码...
// 启动调度器
osKernelStart();
// 应该永远到达不了这行代码
for (;;) {}
}
代码逻辑逐行解读
-
#include "RTX_lib.h"引入RTX的头文件。 -
osMutexDef(myMutex)定义了一个互斥锁,而osMutexId myMutexId;声明了一个互斥锁的ID变量。 -
osThreadId tid1;用来保存创建的任务1的ID。 -
osMutexCreate(osMutex(myMutex))创建一个名为myMutex的互斥锁实例。 -
osThreadCreate(osThread(Task1), NULL)创建一个任务,Task1是任务执行的函数。 -
osKernelStart()启动RTX内核的调度器。
6.3 RTX性能测试与调优
性能测试工具和方法
为了验证RTX内核在嵌入式系统中的性能,可以采用以下工具和方法:
- 跟踪分析器 :μVision IDE提供了跟踪分析器工具,可以记录程序运行时的详细信息,包括任务切换、中断响应时间等。
- 周期性测量 :使用定时器中断来定期测量任务的执行时间,以判断是否满足实时性能要求。
- 负载测试 :通过增加系统负载(如创建更多任务和线程,使用更多资源),测试系统的稳定性和实时性。
调优策略和案例分析
系统调优需要根据实际应用场景来定制。常见的调优策略包括:
- 任务优先级调整 :根据任务的紧急程度和执行频率,合理设置任务优先级,以确保关键任务得到及时处理。
- 内存管理优化 :优化任务堆栈的大小,减少内存碎片,使用内存池来管理动态分配的内存。
- 代码优化 :优化关键任务的代码,减少不必要的中断延迟和任务切换。
在实施调优策略后,可以通过以下案例分析调优效果:
- 案例1 :通过优化任务的执行策略,减少了系统负载下的任务切换时间,提高了CPU的有效利用率。
- 案例2 :通过内存池管理,解决了内存分配延迟问题,增强了系统的实时性能和稳定性。
以上第六章的内容探讨了RTX内核特性、集成优势、μVision IDE中的配置流程、以及性能测试和调优策略。在实际应用中,开发者可以根据具体需求,灵活应用RTX内核,针对特定的硬件平台和应用场景进行优化,以达到最佳的系统性能。 ```
请注意,上述内容是假设性示例,实际编写时,您可能需要根据实际产品和经验进行调整。
7. LiteOS低功耗与物联网特性探索
LiteOS作为一款专为物联网设计的轻量级操作系统,提供了丰富的低功耗和物联网特性,是物联网终端设备开发的理想选择。本章节将从LiteOS的低功耗机制出发,详细探讨其设计理念和实现方式,并着重分析物联网特性,以及相关应用案例。
7.1 LiteOS低功耗机制解析
7.1.1 低功耗设计的理念和实现
LiteOS的低功耗设计理念源于物联网设备对功耗的严格要求。与传统的桌面操作系统不同,物联网设备往往依赖电池或能量收集技术供电,这就要求操作系统必须能够在不影响任务执行的前提下,尽可能地减少能耗。
LiteOS通过以下几种方式实现低功耗设计:
- 动态电源管理(DPM) :动态调整设备的工作频率和电压,以降低不必要的功耗。
- 多级睡眠模式 :提供了多种睡眠模式,例如深度睡眠、浅睡眠等,根据当前任务需求智能切换,以节省电力。
- 精确的时钟管理 :合理安排时钟频率,降低系统运行时钟频率,减少空闲时的功耗。
7.1.2 节能模式和唤醒机制
LiteOS提供了多种节能模式以适应不同的应用场景。开发者可以根据实际需要,选择合适的节能模式,进一步优化设备的能耗。
- 空闲模式 :当系统中没有任务可调度时,CPU进入空闲模式,此时CPU的运行频率降至最低,等待中断来唤醒。
- 睡眠模式 :在空闲模式的基础上,关闭部分非必要的外设和系统功能,通过软件控制设备进入更深层次的节能状态。
- 深度睡眠模式 :在此模式下,尽可能多的外设和模块被关闭,CPU几乎停止运行,仅保留一个最低功耗的实时监控单元,通过外部事件或定时器唤醒。
为了在节能模式下快速响应外部事件,LiteOS设计了一套有效的唤醒机制,包括外设中断、GPIO唤醒、定时器唤醒等多种唤醒源。
7.2 物联网特性与应用
7.2.1 轻量级网络协议栈
LiteOS提供了一个轻量级的网络协议栈,支持多种主流物联网通信协议,如MQTT、CoAP等。这些协议栈经过优化,能够降低对系统资源的需求,同时保证网络通信的稳定性和安全性。
- 模块化设计 :网络协议栈采用模块化设计,开发者可以根据需要灵活裁剪和配置。
- 低延时 :针对物联网应用的即时反馈要求,LiteOS的网络协议栈能够提供快速的网络响应。
7.2.2 物联网安全机制与实践
物联网设备的安全性是整个物联网生态系统的基石。LiteOS内置了丰富的安全机制,为设备提供必要的安全保护。
- 数据加密 :支持多种加密算法,如AES、SHA等,确保数据传输安全。
- 安全启动 :确保设备固件的完整性,防止未授权的代码执行。
- 证书认证 :通过证书管理系统,实现设备身份的验证和授权。
7.3 LiteOS在物联网领域的应用案例
7.3.1 智能家居控制系统
在智能家居控制系统中,LiteOS可用于控制各种智能设备,如智能灯泡、温控器、安防系统等。其轻量级的特性使得可以轻松部署在资源受限的嵌入式硬件上,而其高效的低功耗模式能够保证设备长时间稳定运行。
7.3.2 工业自动化集成实例
在工业自动化领域,LiteOS可以作为智能传感器和控制单元的操作系统。例如,使用LiteOS的智能传感器可以进入深度睡眠模式,仅在检测到特定条件时唤醒进行数据采集和传输,这样既保证了数据的实时性,又大幅降低了能耗。
通过以上案例分析,可以看出LiteOS不仅在低功耗方面表现卓越,而且在物联网领域的广泛应用中,其轻量级网络协议栈和安全机制也得到了实际应用的验证。
LiteOS的设计和应用为物联网设备的开发提供了一种高效且可靠的解决方案。随着物联网技术的不断进步,LiteOS也在不断地进行功能扩展和性能优化,以满足更为复杂的物联网应用场景需求。
简介:GD32307C_EVAL.rar 提供了一个资源包,包含针对GD32307C微控制器的多个实时操作系统移植版本,如FreeRTOS、rt-thread、uCos_II、uCosIII、RTX和LiteOS。开发者可以通过这些资源快速评估不同RTOS在GD32307C平台上的性能表现,为选择合适的RTOS进行嵌入式系统开发提供便利。