你有没有想过,机器人是怎么在三维空间里精准“跳舞”的?它们可不是随便乱动,而是靠着一套精密的坐标系,像GPS一样指引着每一步。
1. 基坐标系:机器人的“老家”
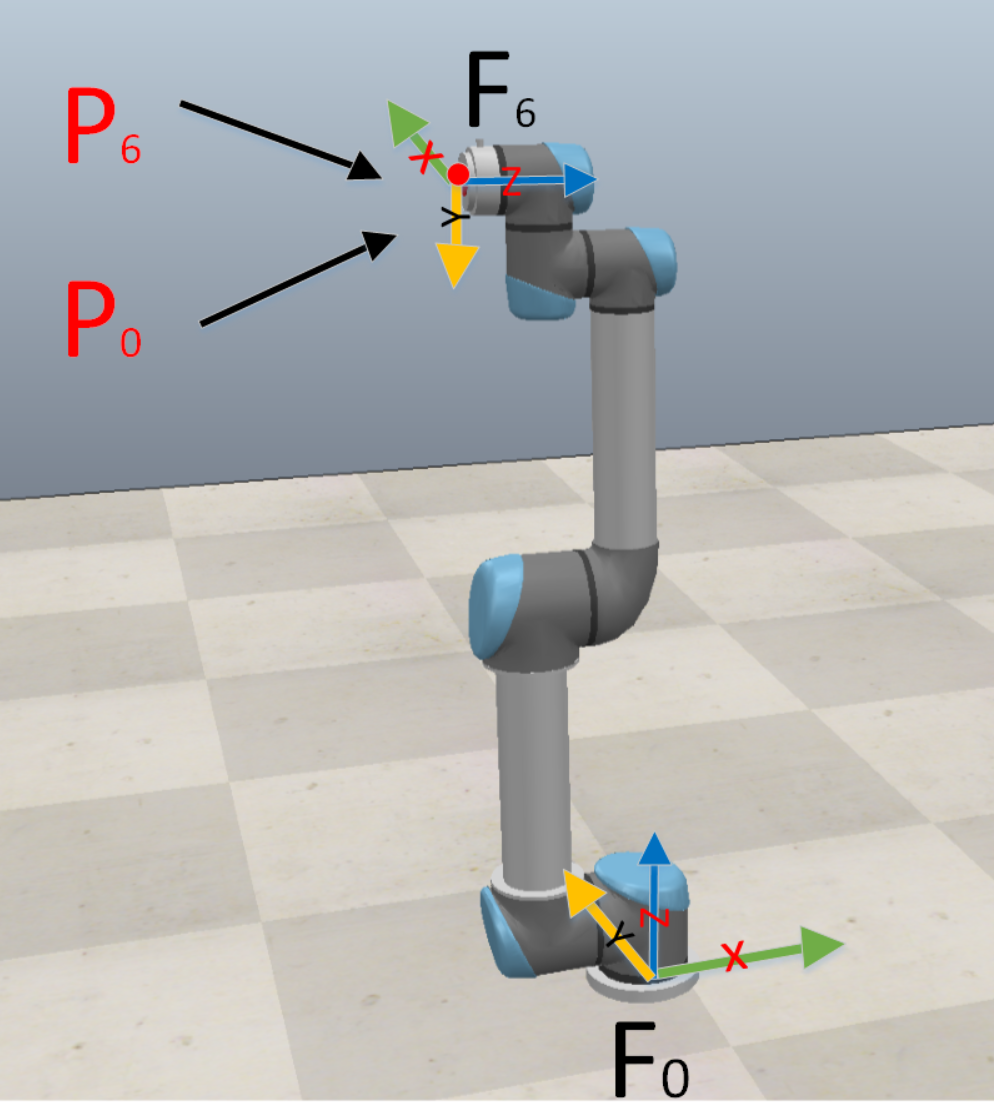
想象一下,基坐标系就是机器人站立的地基,是它的“老家”。这个坐标系是以机器人安装的基座为基准,用来描述它身体的运动。简单来说,不管机器人怎么扭来扭去,它总得知道自己是从哪儿出发的,对吧?
基坐标系是个直角坐标系,用X、Y、Z三个轴来表示:
- X轴:面对机器人,前后方向。
- Y轴:左右方向。
- Z轴:上下方向。
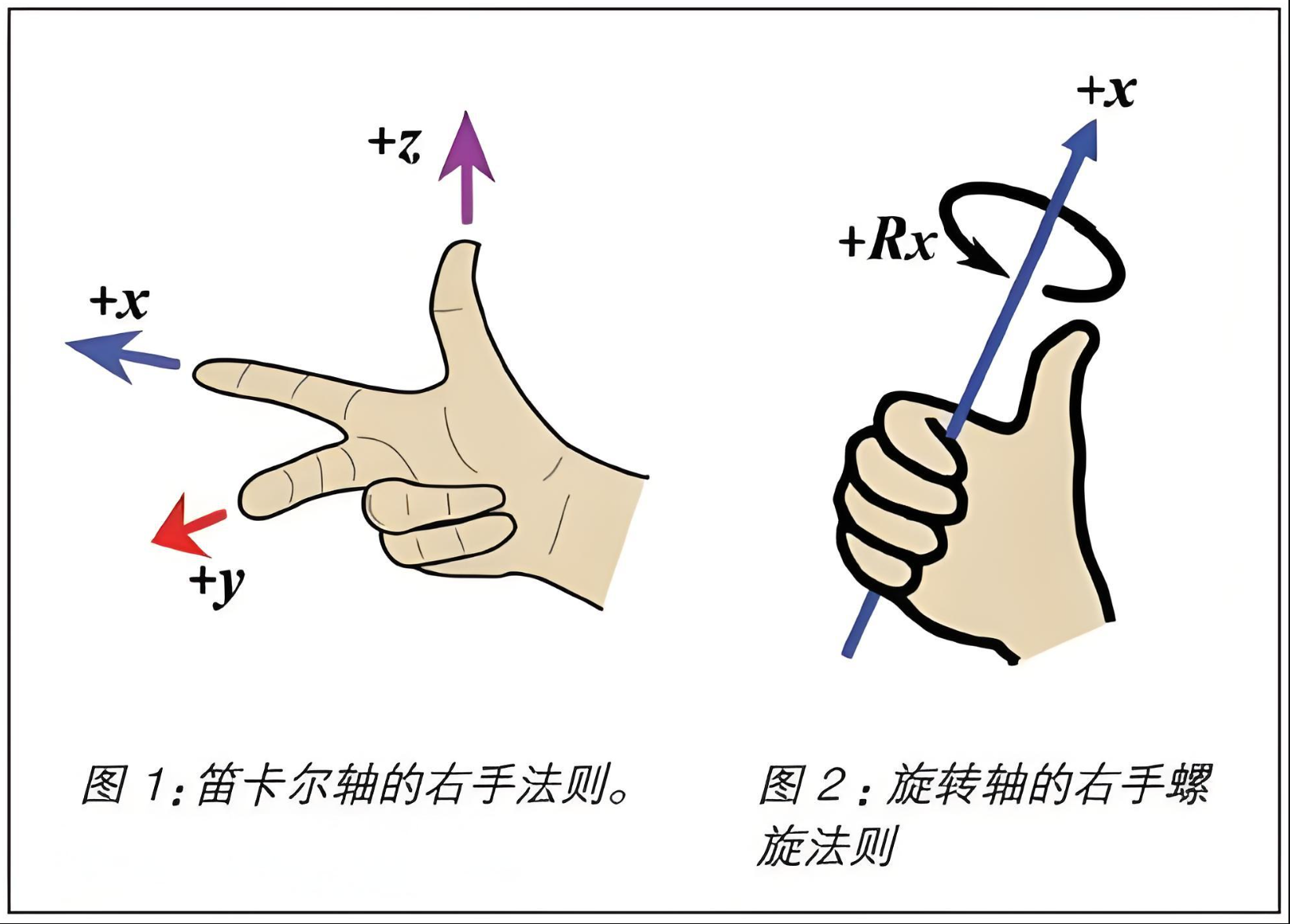
而且,这个坐标系还遵守“右手准则”——伸出右手,大拇指指向X轴,食指指向Y轴,中指自然指向Z轴,是不是很有趣?这个“老家”是机器人运动的基础,所有的位置计算都离不开它。
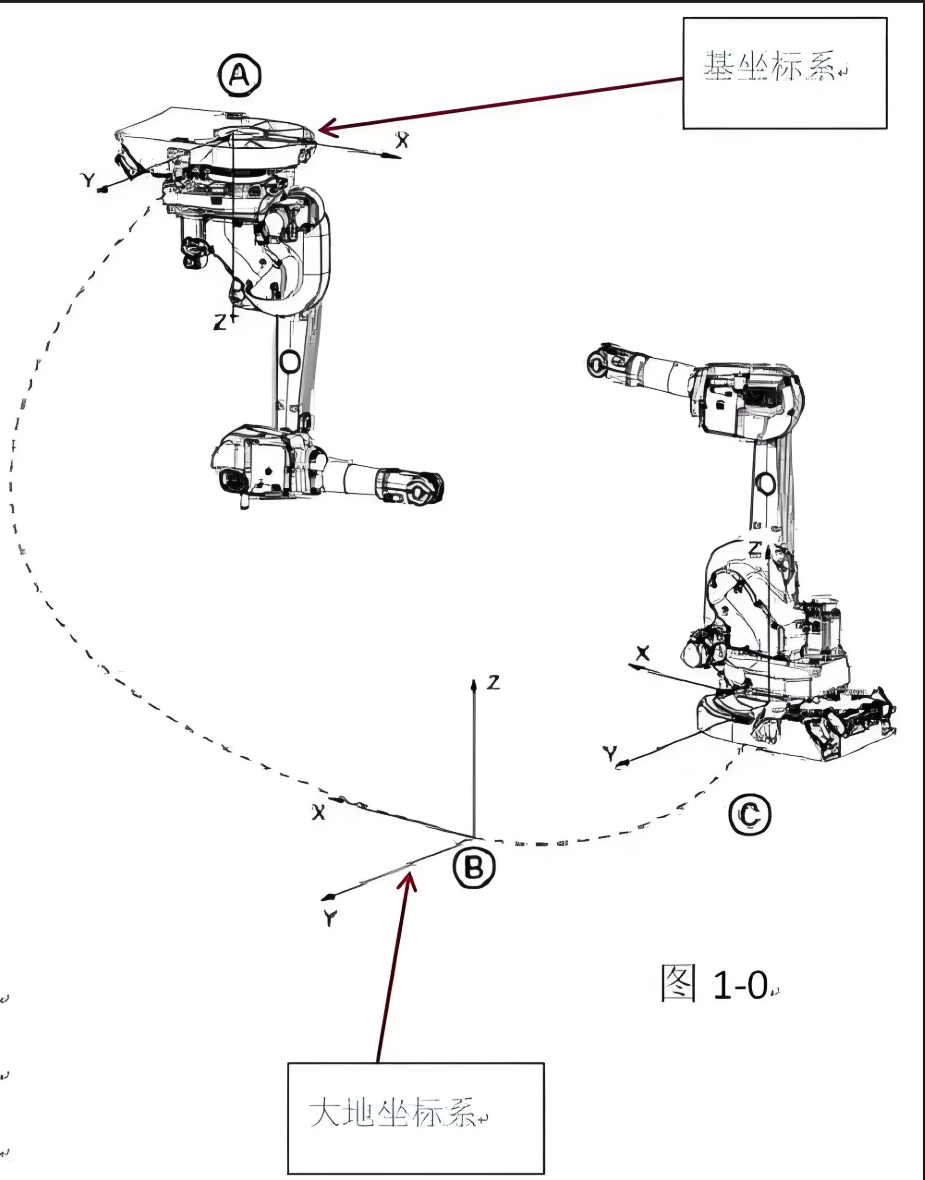
2. 大地坐标系:跟地球“对齐”的参考系
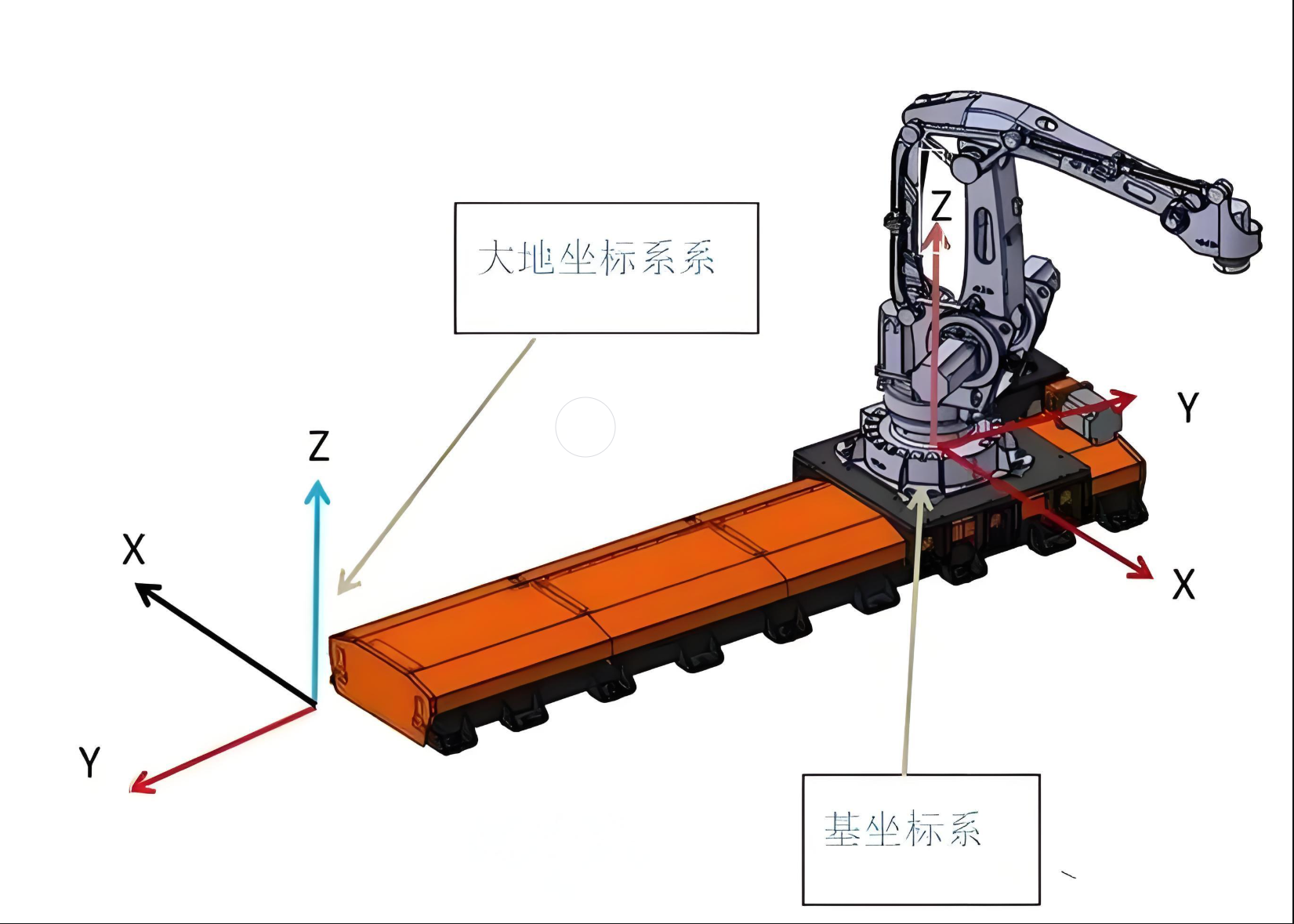
接下来是大地坐标系,顾名思义,它是以地球为参考的坐标系。听起来是不是很“宏大”?它在多机器人联动或者带外部轴的场景中特别重要。大多数时候(大概90%的情况),大地坐标系跟基坐标系是重合的,就像一对双胞胎。
但有两种情况,它们会“分道扬镳”:
- 机器人倒装:
如果机器人被倒着安装(比如挂在天花板上),基坐标系的Z轴方向会跟大地坐标系相反。机器人可以头朝下,但地球可不会跟着翻过来! - 带外部轴的机器人:
比如机器人装在一个移动轨道上,大地坐标系是固定的“老大哥”,而基坐标系会跟着机器人一起跑来跑去,就像个灵活的小弟。
大地坐标系就像一个“大背景”,让多个机器人或者复杂系统能统一“对表”。
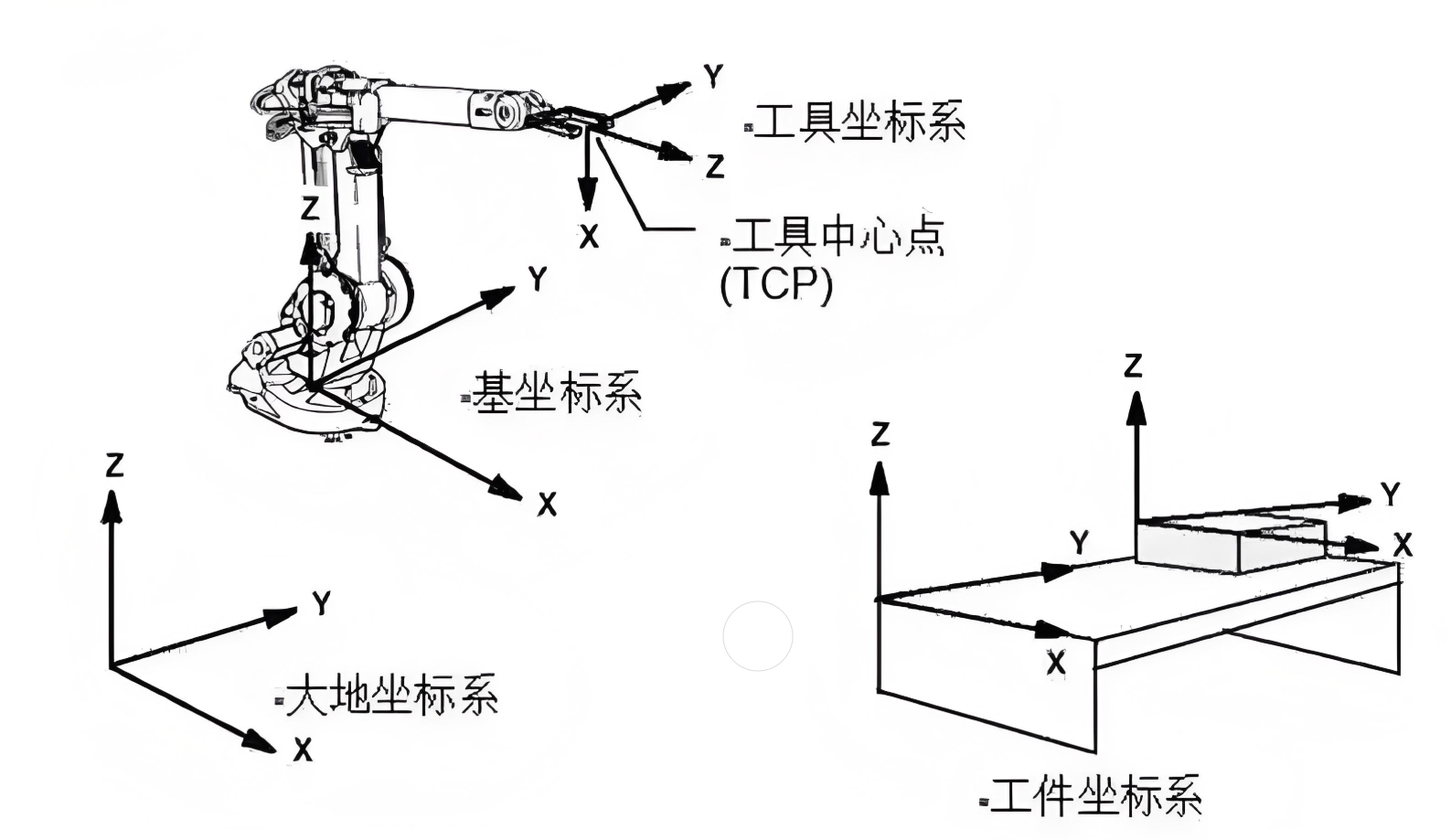
3. 工具坐标系:从“手腕”到“指尖”
说到工具坐标系,就更有意思了。默认情况下,机器人的运动是以手腕中心点(叫Tool0)为参考的。但实际干活时,机器人得靠工具啊,比如焊枪、吸盘之类的东西。这时候,我们就把坐标系的零点挪到工具的中心点上,叫做工具坐标系。

举个例子:
- 焊接时:焊枪是主角,工具坐标系的零点就定在焊枪尖端。
- 吸东西时:用吸盘的话,零点就定在吸盘表面。
这样一来,机器人就不再“以自我为中心”,而是以工具为中心行动,像不像从“手腕”进化到了“指尖”?精准度一下子就上去了!
4. 工件坐标系:工件的“私人定制”
最后一个是工件坐标系,它是以工件为基准的坐标系。工件就是机器人要加工的对象,比如一块金属板、一块木头。有了工件坐标系,机器人就能知道自己的工具在工件上的具体位置。
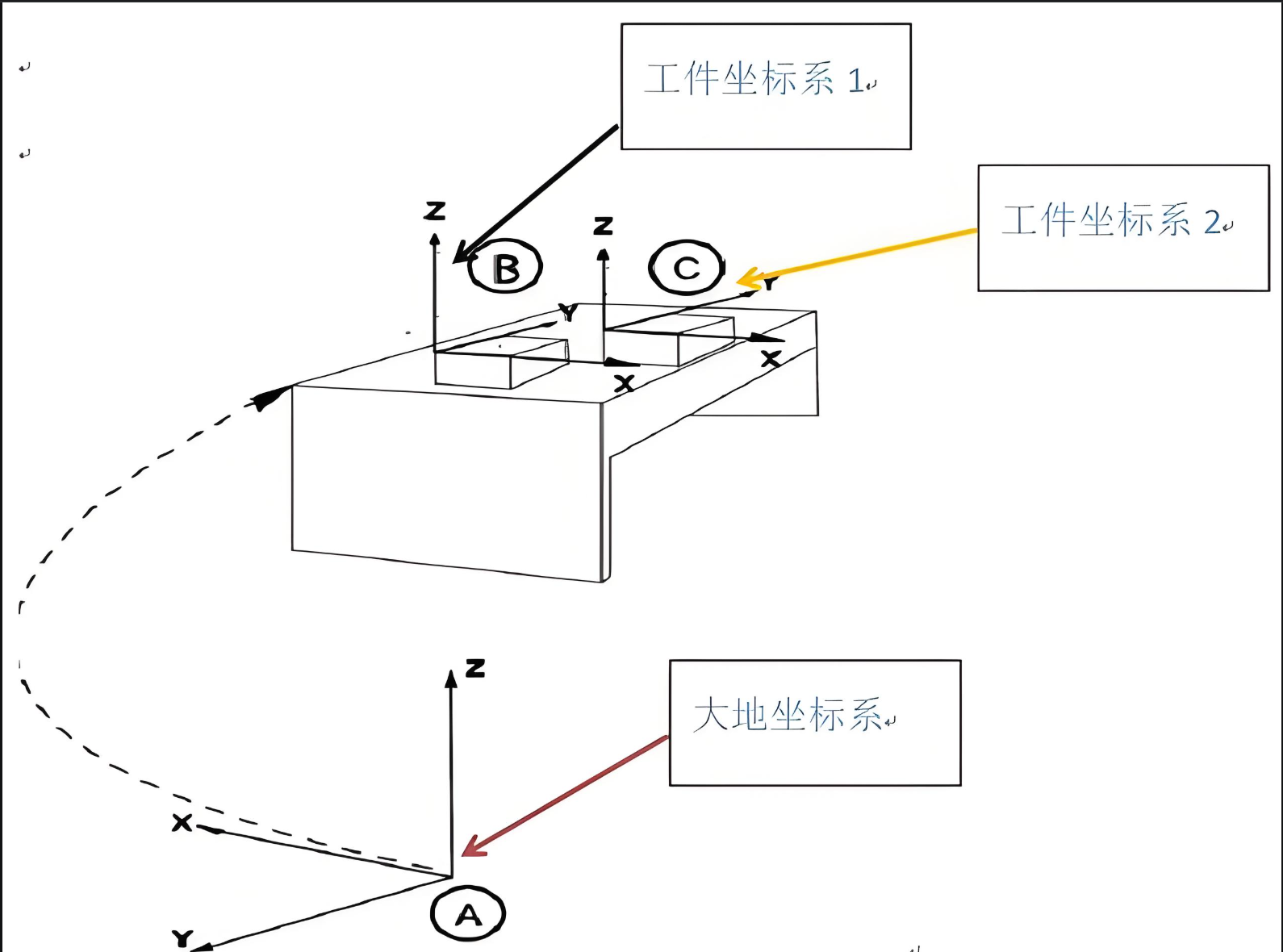
这玩意儿特别实用,尤其是编程的时候。比如:
- 你给工件1编好了一套加工轨迹,完美完成任务。
- 现在来了工件2,长得差不多但位置变了。不用重新写代码,只要把工件坐标系切换到工件2的位置,机器人就能直接开工!
是不是很聪明?这就叫“事半功倍”,程序员的福音啊!
总结:坐标系的“团队合作”
基坐标系、大地坐标系、工具坐标系、工件坐标系——这四兄弟各司其职,像一个默契的团队:
- 基坐标系是机器人的“根”,告诉它“我是谁,我在哪”。
- 大地坐标系是大环境的“标尺”,让复杂系统不乱套。
- 工具坐标系是“手上的活”,让工具干得更精准。
- 工件坐标系是“目标导向”,让编程更省心。