-
- 紧急碰撞管理
-
-
- 功能概述
-
VCM根据安全气囊的激活信号来判断整车是否处于紧急碰撞状态。当处于紧急碰撞状态时,采取措施保证车辆安全。
-
-
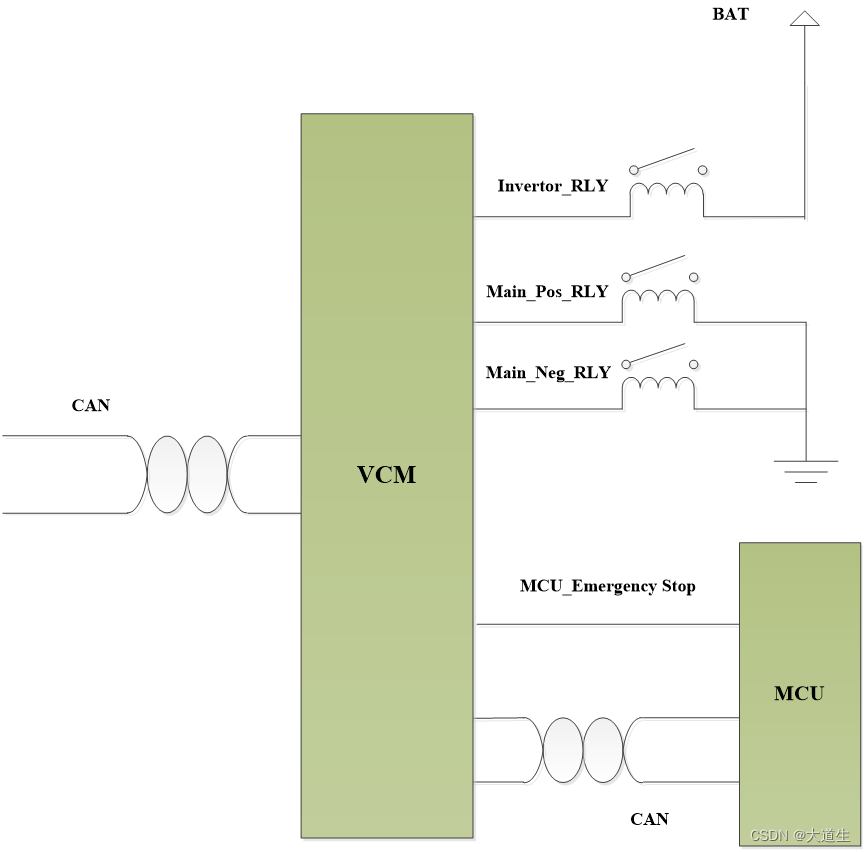
- 功能框图
-
-
-
- 信号列表
- CAN信号
- 信号列表
-
| 序号 |
信号描述 |
CAN ID |
位 (bit) |
类型 |
备注 |
| 2 |
MCU_Torque |
0x140 |
Rx |
||
| 3 |
Crash_Output_Sts |
0x31C |
Rx |
||
| 4 |
VCM_TorqueCommand |
0x214 |
Tx |
||
| 5 |
VCM_DCDCEnable |
0x212 |
Tx |
||
| 6 |
VCM_HV_Permission |
Tx |
TBD |
-
-
-
- 输出信号
-
-
| 序号 |
信号描述 |
输入/输出 |
类型 |
有效值 (接通时) |
湿电流 |
备注 |
| 1 |
MCU_Emergency_Stop |
Output |
数字信号 |
高有效 |
||
| 2 |
Main_Pos_RLY |
Output |
数字信号 |
高有效 |
Main_positive_relay |
|
| 3 |
Main_Neg_RLY |
Output |
数字信号 |
高有效 |
Main_negative_relay |
|
| 4 |
Invertor_relay |
Output |
数字信号 |
低有效 |
-
-
- 系统功能详述
-
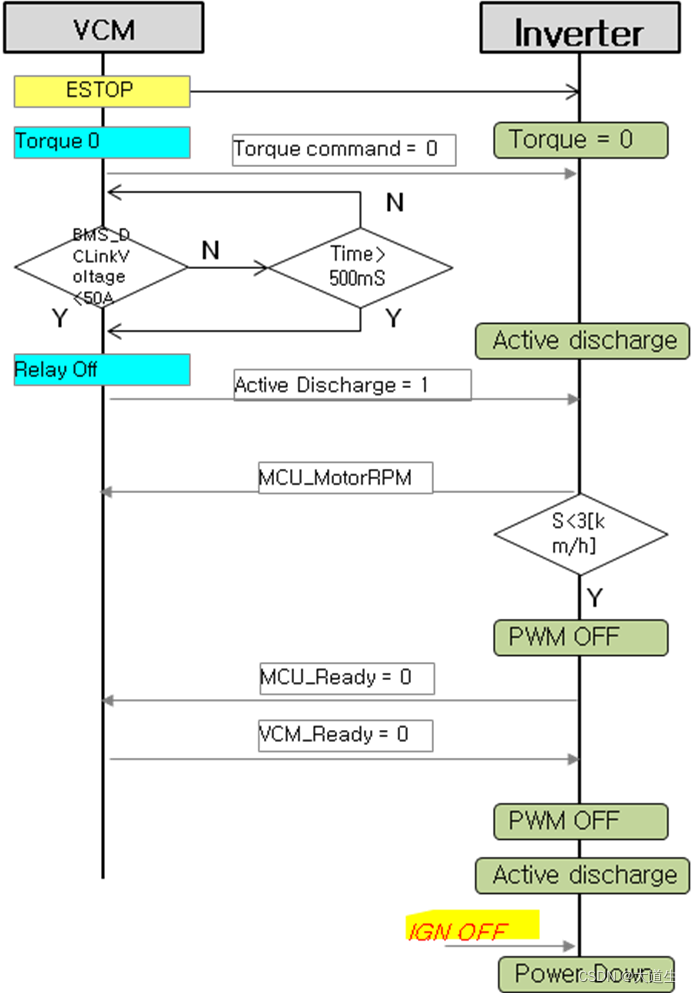
当VCM检测到从安全气囊发送的紧急碰撞信号Crash_Output_Sts有效时,则执行以下动作:
- VCM立即通过CAN发送扭矩命令VCM_TorqueCommand至MCU使其输出扭矩降为0;同时VCM发送硬线信号MCU_Emergency_Stop至MCU令其停止驱动;
- VCM立即通过CAN信号停止使能DC/DC、HVAC;
- 断开高压主正、高压主负继电器。
详细处理了流程如下:
-
- 倒车控制功能
- 功能概述
- 倒车控制功能
倒车控制完成以下功能:
- 倒车车速限制
- 倒车灯指示
-
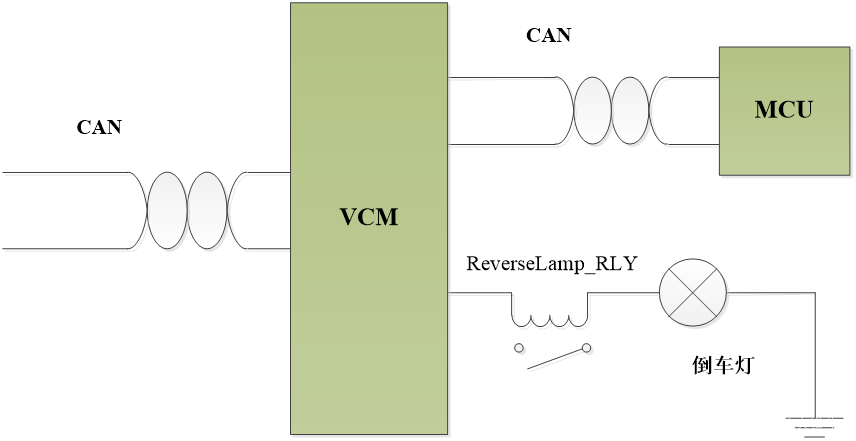
- 原理框图
-
-
-
- 信号列表
- 输出信号
- 信号列表
-
| 序号 |
信号描述 |
输入/输出 |
类型 |
有效值 (接通时) |
湿电流 |
备注 |
| 1 |
ReverseLamp_RLY |
Output |
数字信号 |
低有效 |
倒车灯控制信号 |
-
-
-
- CAN信号
-
-
| 信号描述 |
CAN ID |
位 (bit) |
类型 |
备注 |
|||||
| vehicle_speed |
Rx |
来源于ABS |
|||||||
| S_gearLeverPos |
Rx |
GSM |
|||||||
| S_ShiftPosInv |
Rx |
GSM |
|||||||
| F_gearLeverPos |
Rx |
GSM |
|||||||
| S_EcoMode |
Rx |
GSM |
|||||||
-
-
- 功能详述
- 倒车车速限制
- 功能详述
-
如果检测到整车档位为R档,VCM根据整车状况控制电机的驱动扭矩,限制R档最高车速为50km/h(TBD)。
-
-
-
- 倒车灯指示
-
-
如果检测到整车档位为R档,VCM控制倒车灯控制信号有效,点亮倒车灯。