一、人工智能(AI)与机械智能(Machine Intelligence, MI)的核心差异
1. 定义与范畴
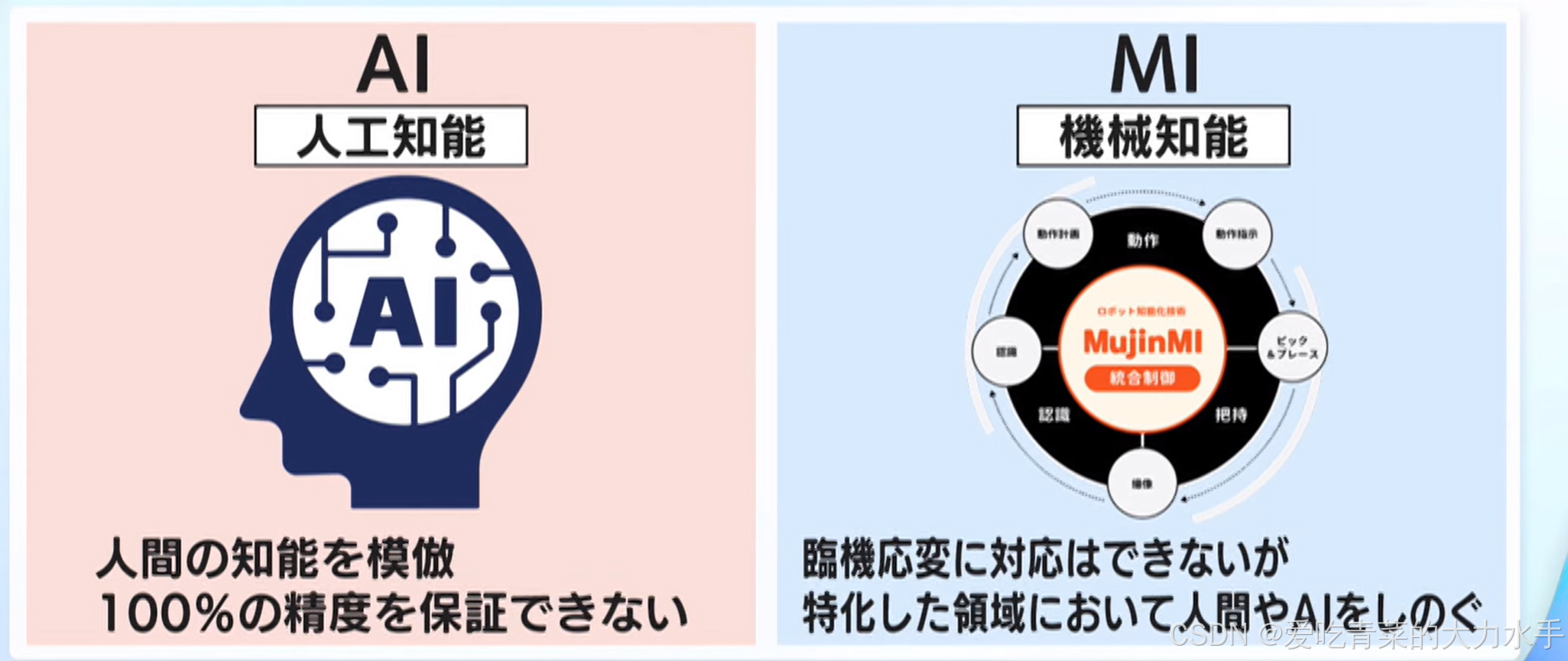
- 人工智能(AI):
旨在通过算法模拟人类的感知、推理、学习和决策能力,核心是“大脑”层面的信息处理。其技术基础包括深度学习、自然语言处理等,强调通过数据驱动模型实现智能行为。 - 机械智能(MI):
更侧重物理环境中的自主执行能力,结合机器人硬件与实时决策算法,强调“感知-分析-执行”闭环控制。MI是AI在工业场景的具象化延伸,更注重任务导向的可靠性和效率。
2. 技术路径对比
| 维度 | 人工智能(AI) | 机械智能(MI) |
|---|---|---|
| 核心目标 | 模拟人类认知能力 | 实现物理任务的自主执行 |
| 数据依赖 | 依赖海量训练数据 | 依赖实时传感器数据和环境反馈 |
| 决策逻辑 | 基于概率模型的推理(如深度学习) | 基于确定性规则与实时路径规划(如RRT算法) |
| 应用场景 | 广泛(医疗诊断、金融分析等) | 工业物流、制造、仓储等物理密集型场景 |
| 稳定性 | 可能因数据偏差出现误判 | 需满足99.9%以上的执行可靠性 |
3. 本质区别
- AI的局限性:
依赖数据质量,且在动态物理环境中可能因计算延迟或数据噪声导致决策失误。 - MI的优势:
通过数字孪生技术和实时闭环控制,实现高精度运动规划和异常处理。例如,Mujin的机器人能在故障时自主调整策略,确保任务连续性。
二、高准确率AI技术在工业/机械领域的应用案例

1. 工业质检
- 案例:
台州尚瑾的AI视觉检测系统在钣金缺陷检测中达到99.9%准确率,远超人工质检的80%-90%。 - 技术原理:
结合计算机视觉与深度学习,实时分析产品图像,自动识别细微缺陷(如划痕、尺寸偏差)。
2. 预测性维护
- 案例:
特斯拉通过AI分析设备传感器数据,提前预测生产线故障,减少停机时间达30%。 - 技术原理:
机器学习模型从历史故障数据中学习模式,预判设备寿命并优化维护计划。
3. 物流与仓储
- 案例:
京东亚洲一号无人仓采用Mujin的MI技术,实现全流程自动化拣选,效率提升4倍,错误率低于0.01%。 - 技术原理:
动态垛型计算与实时路径规划,通过数字孪生模拟仓储环境,优化机器人运动轨迹。
4. 自适应制造
- 案例:
通用汽车利用AI优化焊接参数,结合MI的实时闭环控制,使焊接质量一致性达99.5%。
三、Mujin的Machine Intelligence技术:创新还是概念炒作?
1. 技术原理
- 与AI的区别:
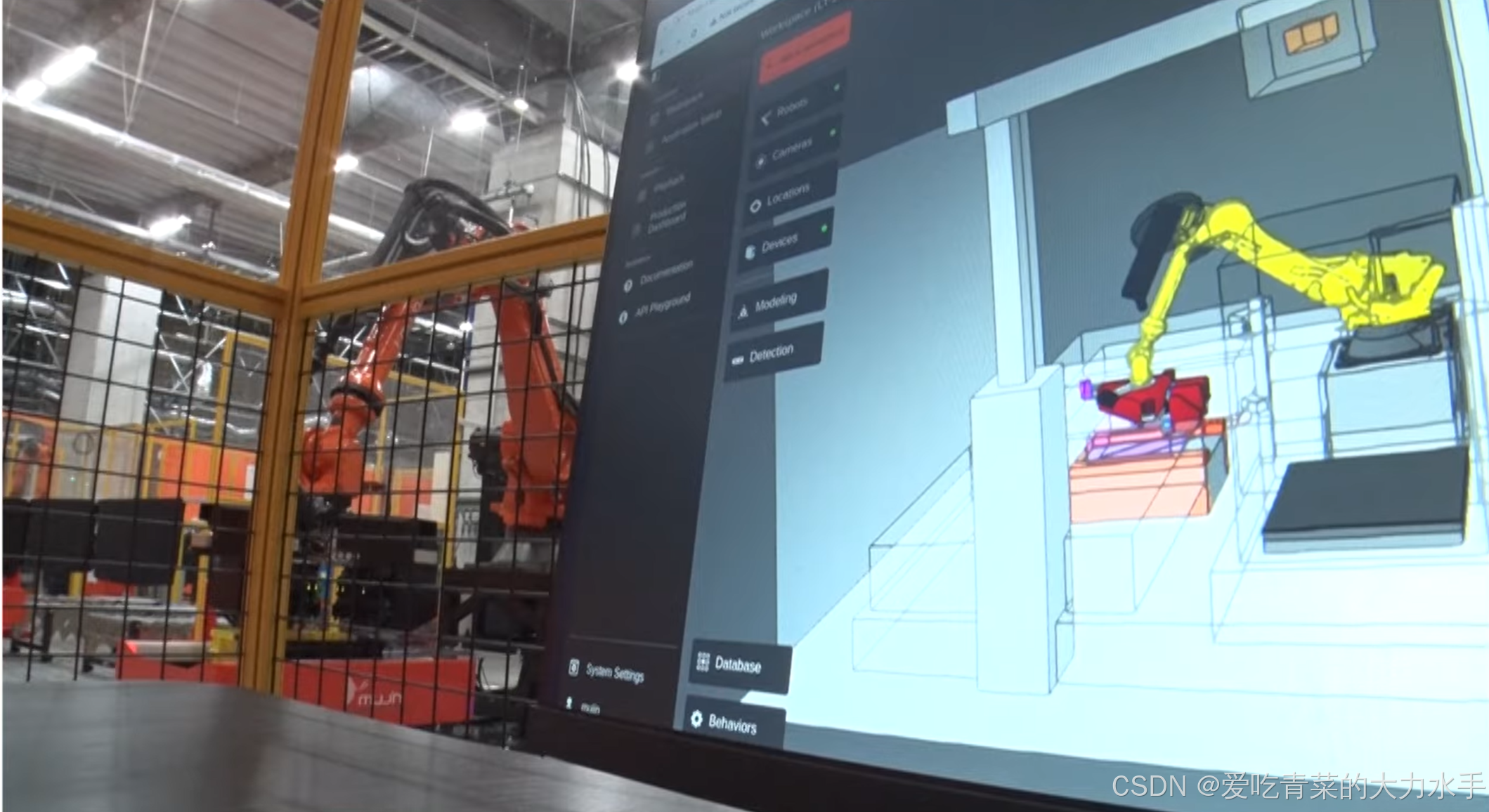
MujinMI不依赖传统深度学习,而是基于工厂实时数据构建确定性决策模型,通过逆向运动学(IK)算法实现高精度路径规划。例如,其机器人可自主判断不同尺寸箱体的堆叠逻辑,无需预编程。 - 核心技术:
- 数字孪生:实时同步物理环境与虚拟模型,快速检测并调整异常。
- 3D视觉感知:多视角数据融合,物体识别精度达99%以上。
2. 实际效果
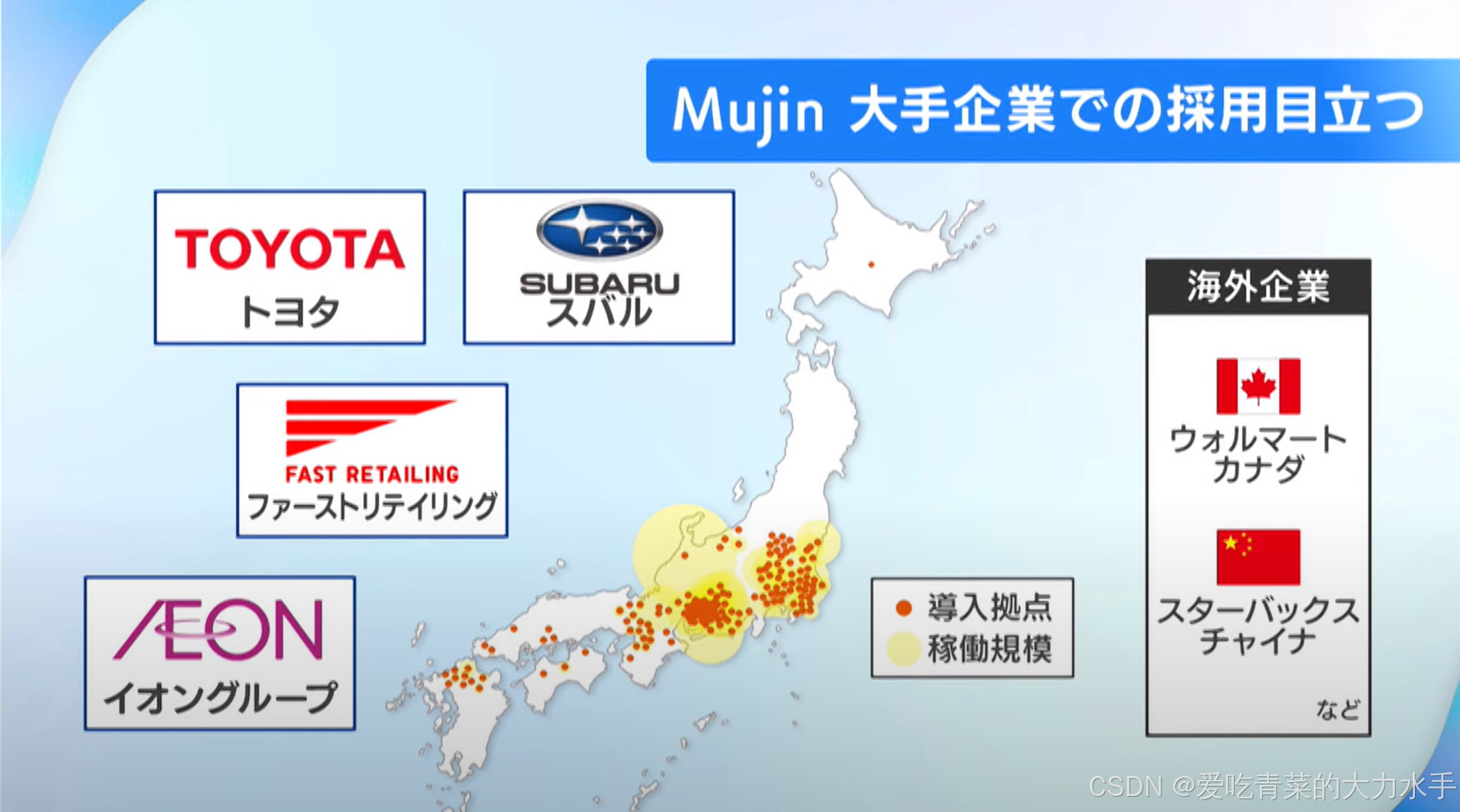
- 客户反馈:
- 丰田:在零部件分拣中,Mujin机器人效率为人工的10倍,错误率低于1/40,000。
- ASKUL(日本电商) :全自动化拣选系统处理海量SKU,准确率提升至99.8%。
- 数据验证:
MujinMI在物流场景中实现“生产即上线”(Day 1 Deployment),错误容忍度达1/20,000,远超传统AI的稳定性。
3. 学术与产业评价
- 创新性:
学术界认为MujinMI填补了AI在工业场景中的“最后一公里”问题,将认知智能(如环境适应)与计算智能(如实时规划)结合,是工业4.0的标杆。 - 局限性:
其技术更适用于结构化环境(如固定流程的仓储),在非结构化场景(如开放式服务机器人)中仍需依赖传统AI。
4. 结论
Mujin的Machine Intelligence并非概念炒作,而是针对工业场景优化的高可靠性智能执行系统。其技术虽未颠覆AI底层逻辑,但在特定领域(如物流自动化)实现了质的突破,是AI与机器人技术融合的成功范例。
四、未来趋势:AI与MI的协同进化
随着边缘计算与5G技术的普及,AI的认知能力将与MI的物理执行进一步融合。例如,特斯拉的Optimus机器人结合GPT-4的决策能力与MI的运动控制,预示了“认知-执行”一体化智能体的可能性。在这一趋势下,MujinMI或将成为工业自动化中不可或缺的“智能四肢”,而通用AI则扮演“大脑”角色,共同推动智能制造升级。