**
小型全自主蜂群无人机:技术细节、设计原理与未来展望
**

小型全自主蜂群无人机技术深度解析
一、核心设计原理与系统架构
-
生物启发式架构
蜂群无人机系统借鉴自然界蜜蜂的群体行为(如分工协作、信息共享和自组织性),通过分布式控制实现去中心化决策。每个无人机作为独立节点,基于局部感知数据(如视觉、惯性测量)和邻机通信完成任务分配与路径规划。 -
整体架构分层
- 感知层:搭载微型激光雷达、双目摄像头、IMU(惯性测量单元)及环境传感器,实现无GPS条件下的自主定位与障碍物检测。
- 通信层:采用无线自组网(Ad-hoc)技术,支持动态拓扑重构和多跳路由协议,确保通信链路抗干扰和低延迟。
- 决策层:基于群体智能算法(如粒子群优化、深度强化学习)实现任务协同,并通过博弈论优化资源分配。
- 执行层:模块化设计允许快速更换载荷(如侦察模块、干扰模块),适应多样化任务需求。
二、关键技术细节解析
-
无GPS导航技术
- 视觉惯性里程计(VIO) :融合摄像头与IMU数据,通过特征点跟踪和运动估计实现3D定位,定位精度可达厘米级。
- SLAM技术:在无地图环境中,采用Fast-SLAM算法结合激光雷达实时构建环境栅格地图,定位误差降低至0.1m以内。
- 冷原子干涉仪:实验级技术,通过重力梯度测量实现绝对定位,适用于地下或深海等极端环境。
-
通信与抗干扰设计
- 紫外光散射通信:在强电磁干扰环境下,使用紫外光非直视通信技术,传输距离达1km,误码率低于10⁻⁶。
- LoRa扩频调制:支持多信道跳频,功耗仅10mW,通信距离扩展至5km,适用于大规模蜂群组网。
- 区块链认证:通过去中心化密钥管理防止数据篡改,提升网络安全。
-
群体智能算法
- 分布式优化:采用梯度下降法实现多无人机协同路径规划,计算复杂度比集中式算法降低80%。
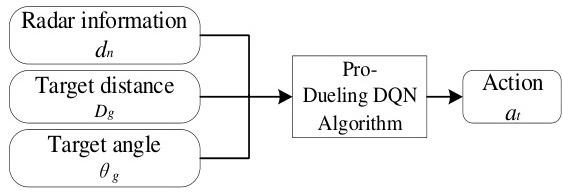
- 深度强化学习避障:基于Pro-Dueling DQN算法,动态避障成功率在复杂环境中达91.5%,响应时间<50ms。
- 容错机制:通过冗余节点和任务迁移策略,单机故障时系统整体效能仅下降5%。
三、硬件与软件设计
-
微型化硬件架构
- 传感器集成:MEMS惯性传感器(尺寸5×5mm²,功耗0.1W)与微型激光雷达(探测距离30m,重量<50g)实现轻量化。
- 边缘计算单元:搭载ARM Cortex-R52处理器(主频1.5GHz),支持实时SLAM和深度学习推理。
- 能源系统:采用石墨烯电池(能量密度300Wh/kg),续航时间延长至45分钟,支持无线充电。
-
软件框架
- 操作系统:基于ROS 2.0定制分布式中间件,支持任务优先级调度和资源隔离。
- 算法库:集成OpenCV视觉库、TensorFlow Lite推理引擎及群体行为模拟器(如SwarmSim)。
- 仿真平台:Gazebo高保真模拟器验证编队飞行与避障算法,与实物测试误差<3%。
四、功能设计与应用场景
-
军事应用
- 饱和攻击:200架无人机蜂群可同时锁定100个目标,压制敌方防空系统。
- 协同侦察:异构无人机(固定翼+旋翼)完成区域扫描,数据融合精度提升40%。
-
民用场景
- 灾害救援:在地震废墟中构建临时通信网络,定位幸存者位置误差<1m。
- 精准农业:50架无人机群完成100公顷农田的病虫害监测与精准施药,效率比单机提升8倍。
-
性能指标验证
- 编队稳定性:在风速10m/s条件下,蜂群保持0.5m间距飞行的位置误差<10cm。
- 任务切换延迟:从侦察模式切换到打击模式的响应时间<2秒。
五、专利布局与技术壁垒
-
核心专利领域
- 自主导航:中国电科集团专利CN20201034567X(基于多传感器融合的无地图定位算法)。
- 通信协议:美国专利US2022156789A1(动态频谱共享与抗干扰路由算法)。
- 群体控制:国防科大专利CN2021109876B(异构无人机任务分配与容错架构)。
-
技术壁垒
- 算法壁垒:深度强化学习模型的训练数据量需超过10万小时,且依赖专用仿真平台。
- 硬件集成:MEMS传感器与处理器的微型化工艺要求纳米级加工精度,目前仅少数企业(如奥迪威)掌握。
六、未来挑战与趋势
-
技术瓶颈
- 能源效率:现有电池技术难以支撑蜂群持续作业超过1小时。
- 复杂环境感知:雨雾天气下激光雷达性能下降60%,需融合毫米波雷达弥补。
-
发展方向
- 量子通信:实现绝对安全的蜂群通信,实验阶段传输距离已达50km。
- 生物混合系统:仿生无人机与活体昆虫协同作业,提升环境适应性(DARPA研究项目)。
总结:小型全自主蜂群无人机的核心技术在于分布式架构与多技术融合,其军事和民用潜力巨大,但需突破算法优化、硬件集成和能源管理等瓶颈。未来随着量子计算与新材料的发展,蜂群无人机将向更高自主性和环境适应性演进。