1.前言
Lidar里程计的结果不准确,拼起来的点也完全不成样子,且它会不断发散,因此误差也会越来越大。就需要用与地图匹配的方式来优化这一结果。在得到第一帧点云时lidar就扫到了数万个点,此时Lidar的位置我们把它作为(0,0,0),在不考虑测量噪声的情况下这数万个点都是相对精确的,我们把这数万个点所构成的环境作为此时的地图。上一章介绍了通过Lidar里程计的方法可以估算lidar的相对运动,于是就可以将此时的Lidar位姿及此时的点按照我们估计的相对运动情况,转换到上一时刻(建立地图时的坐标系)的坐标系下,再和之前的地图进行匹配,就可以优化此时Lidar的位姿了。
同样的雷达建图部分主要包含里程计位姿传播,局部子地图构建,线面误差项优化求解位姿三部分。
2.里程计位姿传播(Odometry Pose Propagation)
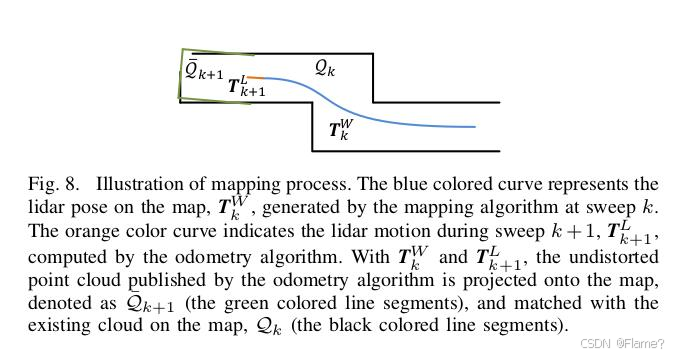
由于 Lidar Mapping 处理频率较低(1Hz),但激光雷达里程计(Lidar Odometry,较高频率 10 Hz)可以提供连续的相对运动估计,因此需要利用里程计结果预测当前帧的初始位姿,通过 Lidar Odometry 计算得到的当前帧相对于上一帧的位姿变换。结合上一帧的世界坐标系位姿预测当前帧在世界坐标系的初始位姿,这个位姿作为 ICP 优化的初值。
void LaserMapping::process()
{
if (!hasNewData()) {
// waiting for new data to arrive...
return;
}
// reset flags, etc.
reset();
// skip some frames?!?
_frameCount++;
if (_frameCount < _stackFrameNum) {
return;
}
_frameCount = 0;
pcl::PointXYZI pointSel;
// relate incoming data to map将相关坐标转移到世界坐标系下->得到可用于建图的Lidar坐标
transformAssociateToMap();
// 将上一时刻所有边特征转到世界坐标系下
size_t laserCloudCornerLastNum = _laserCloudCornerLast->points.size();
for (int i = 0; i < laserCloudCornerLastNum; i++) {
pointAssociateToMap(_laserCloudCornerLast->points[i], pointSel);
_laserCloudCornerStack->push_back(pointSel);
}
// 将上一时刻所有面特征转到世界坐标系下
size_t laserCloudSurfLastNum = _laserCloudSurfLast->points.size();
for (int i = 0; i < laserCloudSurfLastNum; i++) {
pointAssociateToMap(_laserCloudSurfLast->points[i], pointSel);
_laserCloudSurfStack->push_back(pointSel);
}3.局部子地图构建(Submap Construction)
LOAM 采用 Voxel Cube 分块管理地图,在 Lidar Mapping 过程中,每一帧都会 从历史点云构建一个局部子地图,用于匹配当前帧点云。由于 Lidar 采样的点云较大,直接匹配所有历史点云的计算量太大,因此 只选择当前帧所在的局部区域作为匹配对象。
先把之前的点云保存在10m*10m*10m的立方体中,若cube中的点与当前帧中的点云有重叠部分就把他们提取出来保存在KD树中。我们找地图中的点时,要在特征点附近宽为10cm的立方体邻域内搜索(实际代码中是10cm×10cm×5cm)。代码如下:
_laserCloudCenWidth(10),//搜索邻域宽度, cm为单位,
_laserCloudCenHeight(5),// 搜索邻域高度
_laserCloudCenDepth(10),// 搜索邻域深度
_laserCloudWidth(21),//子cube沿宽方向的分割个数,每个子cube 50mm =1m/20
_laserCloudHeight(11), // 高方向个数 50mm
_laserCloudDepth(21),// 深度方向个数 50mm
_laserCloudNum(_laserCloudWidth * _laserCloudHeight * _laserCloudDepth),// 子cube总数而后我们就要找当前估计的Lidar位姿属于哪个子cube。I、J、K对应了cube的索引。可以看出,当坐标属于[-25,25]时,cube对应与(10,5,10)即正中心的那个cube。
pcl::PointXYZI pointOnYAxis;//当前Lidar坐标系{L}y轴上的一点(0,10,0)
pointOnYAxis.x = 0.0;
pointOnYAxis.y = 10.0;
pointOnYAxis.z = 0.0;
pointAssociateToMap(pointOnYAxis, pointOnYAxis);//转到世界坐标系{W}下
// cube中心位置索引
int centerCubeI = int((_transformTobeMapped.pos.x() + 25.0) / 50.0) + _laserCloudCenWidth;
int centerCubeJ = int((_transformTobeMapped.pos.y() + 25.0) / 50.0) + _laserCloudCenHeight;
int centerCubeK = int((_transformTobeMapped.pos.z() + 25.0) / 50.0) + _laserCloudCenDepth;
if (_transformTobeMapped.pos.x() + 25.0 < 0) centerCubeI--;
if (_transformTobeMapped.pos.y() + 25.0 < 0) centerCubeJ--;
if (_transformTobeMapped.pos.z() + 25.0 < 0) centerCubeK--;
//如果取到的子cube在整个大cube的边缘则将点对应的cube的索引向中心方向挪动一个单位,这样做主要是截取边沿cube。
while (centerCubeI < 3) {// 将点的指针向中心方向平移
for (int j =