本项目主要有三个模块包括信号检测模块、主控模块、电机驱动模块。信号检测模块采用光电传感器,用来对黑线进行检测。主控电路采用STM32F103C8T6单片机为控制芯片。电机驱动模块采用意法半导体的L298N专用电机驱动芯片,使用OLED显示行驶的路程和速度,单片机控制与传统分立元件电路相比,使整个系统有很好的稳定性。信号检测模块将采集到的路况信号传入STM32F103C8T6单片机,经单片机处理过后对L298N发出指令进行相应的调整。小车速度由单片机输出的PWM波控制。控制电动小车的速度及转向,从而实现自动循迹的功能。
一、总体设计
基于STM32平台实现智能循迹小车系统,含以下功能:
1、主要围绕STM32F103RBT6开展系统的控制实现设计;
2、采用红外对管传感器,自动检测循迹路线并反馈给主控中心;
3、在OLED屏上显示实时路程、实时速度;
4、通过红外发射按键可控制小车前后前进与左右转弯;
5、采用PWM方式控制电机的供电模式,当偏离路线差值较大时,通过调整左右电机使用 PWM 控制小车进 行差速转弯,当小车偏向左边时降低右边小车车轮达到右转,当小车偏向右边时降低左边小车车轮达到左转。
二、硬件电路
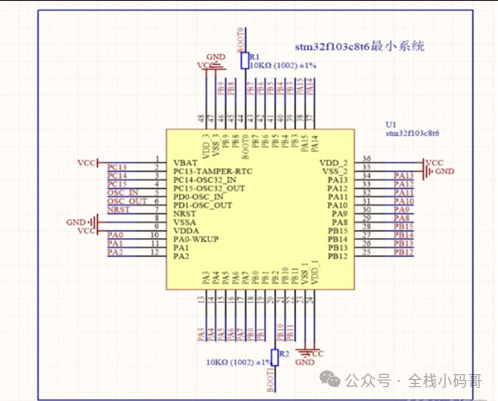
(1)stm32最小系统
为了能够实现对数据进行高速准确的处理,本系统采用STM32F103C8T6作为主控核心。