代码学习
后续再补充
手势识别实战
最好创建一个虚拟环境conda create -n vitpy38 python=3.8
注意数据集结构,与yolov5不同
dataset
-class1
--img
-class2
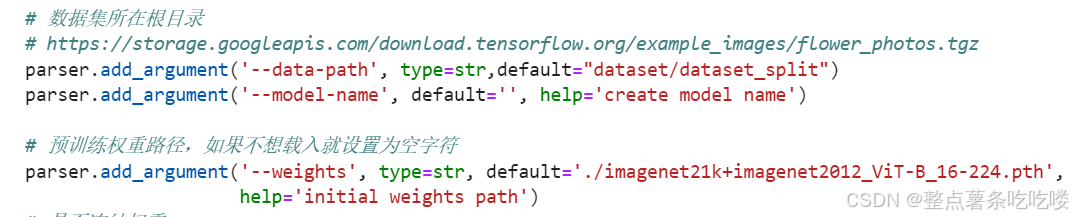
-class3改datapath等参数
parser.add_argument('--num_classes', type=int, default=14)我的类别是14
这里path如果不理解什么是root的话,要反复增删改减尝试呜呜呜
KeyError: 'pre_logits.fc.weight'权重格式不对
加载的预训练权重文件本来就没有这个key,所以在删除检索的时候检索不到,所以报错,
把删除的代码删了就好了。
靠了,好怪,原来是输入数据集文件夹排列不对,把所有图片都认为是train类了,在尝试花数据集后才恍然大悟
flower_photos
无权重
有权重
为什么花数据集只用10轮效果就已经很好,而手势数据集却不行?
我认为:花数据集大小是手势的大约3倍,且只有5类,而手势有14类,每类的数据集很小,所以效果差。
我的数据集只有14类,但是我的num_classes设置为14时,报错下面内容,我又发现我改为15时,正常运行File "/root/autodl-tmp/vit/utils.py", line 148, in train_one_epoch accu_loss.item() / (step + 1), RuntimeError: CUDA error: device-side assert triggered CUDA kernel errors might be asynchronously reported at some other API call, so the stacktrace below might be incorrect. For debugging consider passing CUDA_LAUNCH_BLOCKING=1 Compile with `TORCH_USE_CUDA_DSA` to enable device-side assertions.
发现是因为有不显示的隐藏文件,删了就好了
手势识别
有权重50轮![]()
有权重100轮,改进不大![]()
改进点说明
-
优化器替换:
-
将
SGD替换为AdamW,更适合 Transformer 类模型。 -
调整
weight_decay为0.05,增强正则化效果。
-
-
学习率调度:
-
添加了 5 个 epoch 的线性预热阶段,避免训练初期不稳定。
-
保留了原有的余弦退火机制,并整合了预热逻辑。
-
| 组件 | 原始配置 | 改进配置 |
|---|---|---|
| 优化器 | SGD(lr=args.lr, momentum=0.9) |
AdamW(lr=3e-4, weight_decay=0.05) |
| 学习率曲线 | 纯余弦衰减 | 前5个epoch线性增长 + 后续余弦衰减 |
| 权重衰减 | 5e-5 | 0.05(增大正则化强度) |
| 预热机制 | 无 | 内置在lambda函数中 |
有权重100轮batch_size=8+AdamW+退火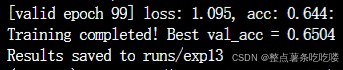
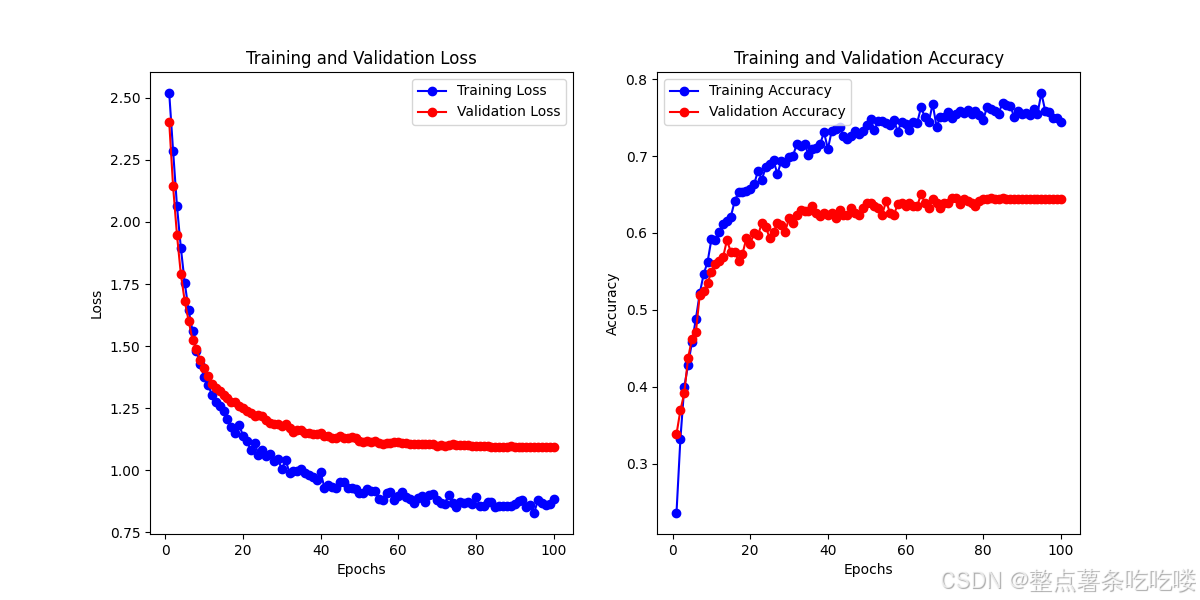
只提升了一点,效果依然不是很好,估计还是数据集太小了
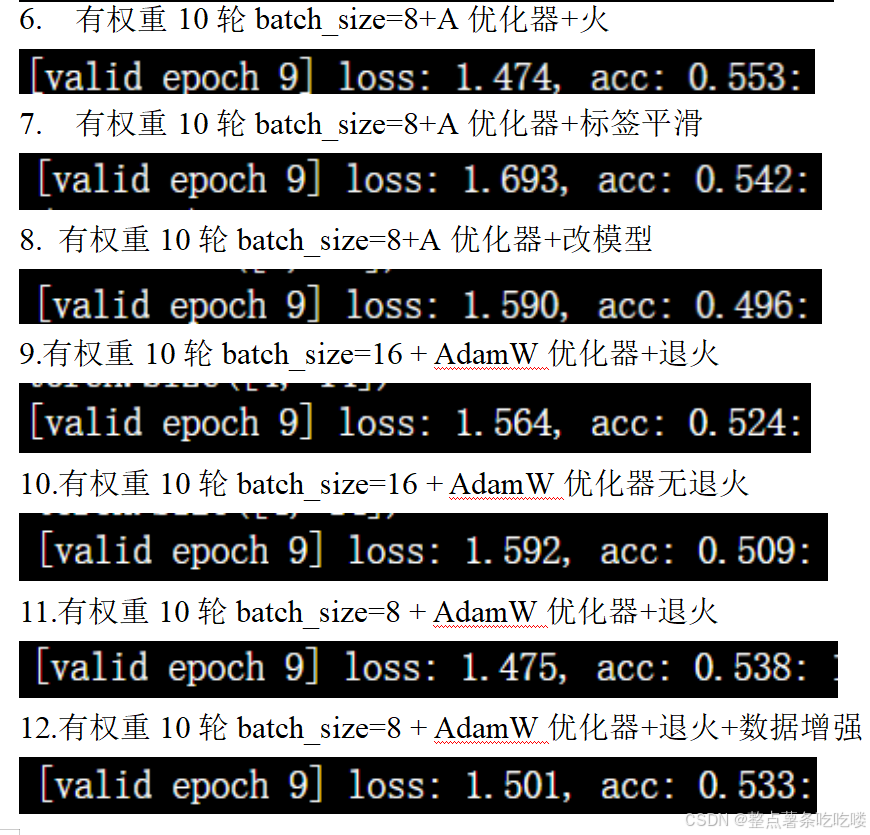
下面是尝试过的失败记录