文章目录
前言
本篇文章中将会用针对之前文章中的LTI系统、卷积函数、DTFT等相关内容,将其进行串联起来。主要介绍卷积函数与DTFT的关系以及频率响应,在这之中,将会对特征函数、稳态响应和瞬态响应,以及频率响应中的幅频响应和相位响应做深入的了解。
|版本声明:山河君,未经博主允许,禁止转载
一、卷积函数和DTFT
1.LTI系统的频域表示
在之前音频进阶学习四——线性时不变系统之卷积和文章中,介绍了将LTI系统单位脉冲响应、任意的输入信号与输出信号关联起来的表达式,也就是卷积和为:
y ( n ) = ∑ k = − ∞ ∞ x ( k ) h ( n − k ) = > y ( n ) = x ( n ) ∗ h ( n ) y(n) =\sum_{k = -\infty}^\infty x(k)h(n-k) => y(n) = x(n) * h(n) y(n)=k=−∞∑∞x(k)h(n−k)=>y(n)=x(n)∗h(n)
然后我们在介绍DTFT的性质音频进阶学习十——DTFT的条件、性质与举例、Z变换的性质音频进阶学习十二——Z变换一(Z变换、收敛域、性质与定理)时,有以下特性:
- 对于DTFT:时域卷积等于频域点乘
Y ( e j ω ) = X ( e j ω ) × H ( e j ω ) Y(e^{j\omega})=X(e^{j\omega})\times H(e^{j\omega}) Y(ejω)=X(ejω)×H(ejω) - 对于Z变换也是一样:时域卷积等于Z域相乘
Y ( z ) = X ( z ) × H ( z ) Y(z)=X(z)\times H(z) Y(z)=X(z)×H(z)
2.LTI系统的特征函数
1)特征函数的介绍
- 定义:LTI系统的特征函数指的是在某些特定的输入序列,系统的输出为输入序列和某个复常数的乘积。
- 特征函数:该特定的输入函数为特征函数。
- 特征值:该复常数为特征值。
- 作用:它是用来表征LTI系统动态行为和响应特性的数学工具。
2)对于特征函数的分析
上文中给出特征函数的定义,条件是它在特定情况下的某些频率响应,比如常见的特定系统输入函数: x [ n ] = e j ω n x[n]=e^{j\omega n} x[n]=ejωn,将它代入到卷积公式中就有:
y ( n ) = ∑ k = − ∞ ∞ x ( k ) h ( n − k ) 根据交换律 y ( n ) = ∑ k = − ∞ ∞ x ( n − k ) h ( k ) 代入 x [ n ] y ( n ) = ∑ k = − ∞ ∞ e j ω ( n − k ) h ( k ) y ( n ) = ∑ k = − ∞ ∞ e j ω n e − j ω k h ( k ) 根据齐次性 y ( n ) = e j ω n ∑ k = − ∞ ∞ h ( k ) e − j ω k y(n) =\sum_{k = -\infty}^\infty x(k)h(n-k) \quad 根据交换律\\ y(n) =\sum_{k = -\infty}^\infty x(n-k)h(k) \quad 代入x[n] \\ y(n) =\sum_{k = -\infty}^\infty e^{j\omega (n-k)}h(k) \\ y(n) =\sum_{k = -\infty}^\infty e^{j\omega n} e^{-j\omega k}h(k) \quad 根据齐次性 \\ y(n) =e^{j\omega n}\sum_{k = -\infty}^\infty h(k) e^{-j\omega k} y(n)=k=−∞∑∞x(k)h(n−k)根据交换律y(n)=k=−∞∑∞x(n−k)h(k)代入x[n]y(n)=k=−∞∑∞ejω(n−k)h(k)y(n)=k=−∞∑∞ejωne−jωkh(k)根据齐次性y(n)=ejωnk=−∞∑∞h(k)e−jωk
而根据DTFT公式,对于单位脉冲响应,它的DTFT其实就是 ∑ k = − ∞ ∞ h ( k ) e − j ω k \sum_{k = -\infty}^\infty h(k) e^{-j\omega k} ∑k=−∞∞h(k)e−jωk,也就是 H ( e j ω ) H(e^{j\omega}) H(ejω),所以对于输入信号为 x [ n ] = e j ω n x[n]=e^{j\omega n} x[n]=ejωn,它的输出为:
y [ n ] = e j ω n H ( e j ω ) y[n] = e^{j\omega n}H(e^{j\omega}) y[n]=ejωnH(ejω)
根据上述定义:
- e j ω n e^{j\omega n} ejωn为该系统的特征函数
- H ( e j ω ) H(e^{j\omega}) H(ejω)为该系统的特征值
而对于两个复指数相乘,等同于模相乘,相位进行相加,例如:
z 1 × z 2 = A 1 e j ω 1 ϕ 1 × A 2 e j ω 2 ϕ 2 = A 1 A 2 e j [ ( ω 1 ω 2 + ( ϕ 1 + ϕ 2 ) ] z_1\times z_2 = A_1e^{j\omega_1 \phi_1} \times A_2e^{j\omega_2 \phi_2} = A_1A_2e^{j[(\omega_1 \omega_2+(\phi_1+\phi_2)}] z1×z2=A1ejω1ϕ1×A2ejω2ϕ2=A1A2ej[(ω1ω2+(ϕ1+ϕ2)]
由于在上式 y [ n ] = e j ω n H ( e j ω ) y[n] = e^{j\omega n}H(e^{j\omega}) y[n]=ejωnH(ejω)中, ω 1 = ω 2 \omega_1= \omega_2 ω1=ω2,不会引入新的频率分量,所以对于该式,只会对于模和相位发生变化。这种行为也叫做调制。
3)特征函数在DTFT中的特点
在音频进阶学习九——离散时间傅里叶变换DTFT中,有说过IDTFT的表示为
x [ n ] = 1 2 π ∫ − π π X ( e j ω ) e j ω n d ω x[n]=\frac{1}{2\pi}\int_{-\pi}^{\pi}X(e^{j\omega})e^{j\omega n}d\omega x[n]=2π1∫−ππX(ejω)ejωndω
而对于IDTFT的释义有提到对于从 − π -\pi −π到 π \pi π的范围中,对于某一时刻 n n n,可以看作拥有 ω 0 n , ω 1 n , ω 2 n . . . . \omega_0 n, \omega_1 n,\omega_2n.... ω0n,ω1n,ω2n....的频率分量,然后通过包含了信号的不同频率成分的幅度和相位的 X ( e j ω ) X(e^{j\omega}) X(ejω),与该复指数相乘算出对于在该时刻 n n n时,该频率对其的贡献,再加权平均。所以有以下:
- 转换一下,对于不同频率分量 ω 0 \omega_0 ω0,它在时域上的表示应该是 1 2 π X ( e j ω 0 ) e j ω n d ω \frac{1}{2\pi}X(e^{j\omega_0})e^{j\omega n}d\omega 2π1X(ejω0)ejωndω
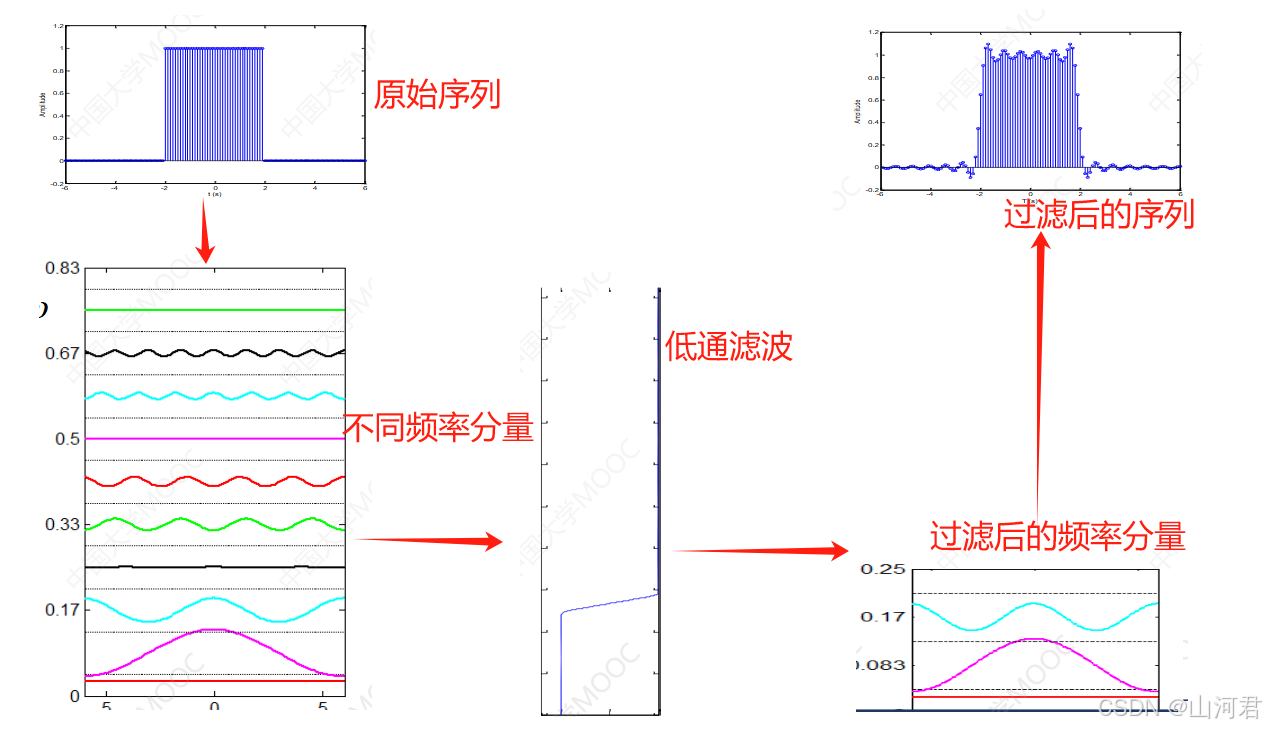
- 针对于每一个频率分量的输出,应该是频率分量乘上单位脉冲响应,下图中是一个单位脉冲响应实际上是一个低通滤波器,每一个频率分量的输出为:
1 2 π X ( e j ω 0 ) e j ω n H ( e j ω ) d ω \frac{1}{2\pi}X(e^{j\omega_0})e^{j\omega n} H(e^{j\omega})d\omega 2π1X(ejω0)ejωnH(ejω)dω - 将所有频率分量叠加得到 y [ n ] = 1 2 π ∫ − π π X ( e j ω ) H ( e j ω n ) e j ω n d ω y[n] = \frac{1}{2\pi}\int_{-\pi}^{\pi}X(e^{j\omega})H(e^{j\omega n})e^{j\omega n}d\omega y[n]=2π1∫−ππX(ejω)H(ejωn)ejωndω
- 上文中有说到 Y ( e j ω ) = X ( e j ω ) × H ( e j ω ) Y(e^{j\omega})=X(e^{j\omega})\times H(e^{j\omega}) Y(ejω)=X(ejω)×H(ejω),所以 y [ n ] = 1 2 π ∫ − π π Y ( e j ω ) e j ω n d ω y[n] = \frac{1}{2\pi}\int_{-\pi}^{\pi}Y(e^{j\omega})e^{j\omega n}d\omega y[n]=2π1∫−ππY(ejω)ejωndω
其实这里大家可以看到,如果对于 y [ n ] y[n] y[n]做IDTFT,根据IDTFT公式, y [ n ] = 1 2 π ∫ − π π Y ( e j ω ) e j ω n d ω y[n] =\frac{1}{2\pi}\int_{-\pi}^{\pi}Y(e^{j\omega})e^{j\omega n}d\omega y[n]=2π1∫−ππY(ejω)ejωndω,而通过上文我们知道 y [ n ] = 1 2 π ∫ − π π X ( e j ω ) H ( e j ω n ) e j ω n d ω y[n] = \frac{1}{2\pi}\int_{-\pi}^{\pi}X(e^{j\omega})H(e^{j\omega n})e^{j\omega n}d\omega y[n]=2π1∫−ππX(ejω)H(ejωn)ejωndω,对比两个式子不难看出 Y ( e j ω ) = X ( e j ω ) × H ( e j ω ) Y(e^{j\omega})=X(e^{j\omega})\times H(e^{j\omega}) Y(ejω)=X(ejω)×H(ejω),这也作证了时域卷积等于频域点乘。
3.稳态响应和瞬态响应
上面说的是符合特征函数的 x [ n ] = e j ω n x[n]=e^{j\omega n} x[n]=ejωn是一个双边序列,那如果 x [ n ] = e j ω n u [ n ] x[n]=e^{j\omega n}u[n] x[n]=ejωnu[n],即是一个因果序列,代入到卷积公式中:
y ( n ) = ∑ k = − ∞ ∞ h ( k ) e j ω ( n − k ) u [ n − k ] y(n) =\sum_{k = -\infty}^\infty h(k) e^{j\omega (n-k)}u[n-k] y(n)=k=−∞∑∞h(k)ejω(n−k)u[n−k]
由于当 k > n u [ n − k ] = 0 , k ≤ n u [ n − k ] = 1 k>n \quad u[n-k]=0, k\leq n\quad u[n-k]=1 k>nu[n−k]=0,k≤nu[n−k]=1,所以上式为
y ( n ) = ∑ k = − ∞ n h ( k ) e j ω ( n − k ) y(n) =\sum_{k = -\infty}^n h(k) e^{j\omega (n-k)} y(n)=k=−∞∑nh(k)ejω(n−k)
如果 k ∈ [ − ∞ , ∞ ] k \in[-\infty, \infty] k∈[−∞,∞],那么就变成了
y ( n ) = ∑ k = − ∞ ∞ h ( k ) e j ω ( n − k ) − ∑ k = n + 1 ∞ h ( k ) e j ω ( n − k ) = > y ( n ) = e j ω n H ( e j ω ) − ∑ k = n + 1 ∞ h ( k ) e j ω ( n − k ) y(n) =\sum_{k = -\infty}^{\infty} h(k) e^{j\omega (n-k)} - \sum_{k = n+1}^{\infty} h(k) e^{j\omega (n-k)} =>\\ y(n) =e^{j\omega n}H(e^{j\omega}) - \sum_{k = n+1}^{\infty} h(k) e^{j\omega (n-k)} y(n)=k=−∞∑∞h(k)ejω(n−k)−k=n+1∑∞h(k)ejω(n−k)=>y(n)=ejωnH(ejω)−k=n+1∑∞h(k)ejω(n−k)
则我们把:
- e j ω n H ( e j ω ) e^{j\omega n}H(e^{j\omega}) ejωnH(ejω)称为稳态响应:指的是系统在长期运行后,响应信号不再变化的部分。
- ∑ k = n + 1 ∞ h ( k ) e j ω ( n − k ) \sum_{k = n+1}^{\infty} h(k) e^{j\omega (n-k)} ∑k=n+1∞h(k)ejω(n−k)称为瞬态响应:描述的是系统对初始条件或短时输入的反应。
值得注意的是,只要是因果稳定的LTI系统,瞬态响应会逐渐趋向于0,在分析时,可以只考虑稳态响应。这是由于通常系统的单位脉冲响应 h ( k ) h(k) h(k)会随着 n n n的增大而变小,因此瞬态响应会逐渐消失(这个以后的文章会再提及)。
二、频率响应
1.定义
对于卷积公式我们知道它的存在:
Y ( e j ω ) = X ( e j ω ) H ( e j ω ) Y(e^{j\omega})=X(e^{j\omega})H(e^{j\omega}) Y(ejω)=X(ejω)H(ejω)
其中 H ( e j ω ) H(e^{j\omega}) H(ejω)是系统的频率响应,就像上文中的低频滤波器一样。根据DTFT我们知道:
- ∣ H ( e j ω ) ∣ |H(e^{j\omega})| ∣H(ejω)∣:是频率响应的幅度和频率的关系,叫做幅频响应
- ∠ H ( e j ω ) \angle H(e^{j\omega}) ∠H(ejω):是频率响应的相位和频率的关系,叫做相位响应
- H ( e j ω ) = ∣ H ( e j ω ) ∣ e j ∠ H ( e j ω ) H(e^{j\omega}) = |H(e^{j\omega})|e^{j\angle H(e^{j\omega})} H(ejω)=∣H(ejω)∣ej∠H(ejω):幅频响应和相位响应的表示方法,它是使用极坐标表示频率响应的DTFT,即是模长和相位的乘积
- ∣ Y ( e j ω ) ∣ = ∣ X ( e j ω ) ∣ ∣ H ( e j ω ) ∣ |Y(e^{j\omega})|=|X(e^{j\omega})||H(e^{j\omega})| ∣Y(ejω)∣=∣X(ejω)∣∣H(ejω)∣:输出的DTFT模为输入和频率响应的DTFT的模相乘
- ∠ Y ( e j ω ) = ∠ X ( e j ω ) + ∠ H ( e j ω ) \angle Y(e^{j\omega})=\angle X(e^{j\omega})+\angle H(e^{j\omega}) ∠Y(ejω)=∠X(ejω)+∠H(ejω):输出的DTFT相位响应为输入和频率响应的DTFT的相位响应相加
从物理意义上看,频率响应是输入信号经过一个系统后,对不同频率输入信号的响应特性的函数。它告诉我们系统在每个频率下的行为,包括幅度变化(增益或衰减)和相位变化(信号延迟)。
2.幅频响应
幅频响应是我们用来分析系统在不同频率上对于输入信号的在该频率分量的影响。实际上,上文中已经给出 ∣ Y ( e j ω ) ∣ = ∣ X ( e j ω ) ∣ ∣ H ( e j ω ) ∣ |Y(e^{j\omega})|=|X(e^{j\omega})||H(e^{j\omega})| ∣Y(ejω)∣=∣X(ejω)∣∣H(ejω)∣,即输出信号的某一频率分量幅度实际上取决于输入信号的模和频率响应的模的乘积。
3.相频响应
在之前音频进阶学习九——离散时间傅里叶变换DTFT,我们说相位决定了波形的起始点,或从时间零点开始,波形开始的“位置”。
相频响应是用来分析一个系统不同频率分量上对于输入信号的相位影响。对于幅频响应而言,输出信号的某一频率分量幅度实际上取决于输入信号的模和频率响应的模的乘积,而输出信号恢复为时域信号时,是由不同频率分量叠加为时域信号,此时就不得不考虑相位带来的影响。
例如:如果一个滤波器存在相位,可能就会引起下图中的情况,不同频率分量因为相位发生了不同延迟,导致峰值和谷值发生了偏差,很容易突破上限导致失真:
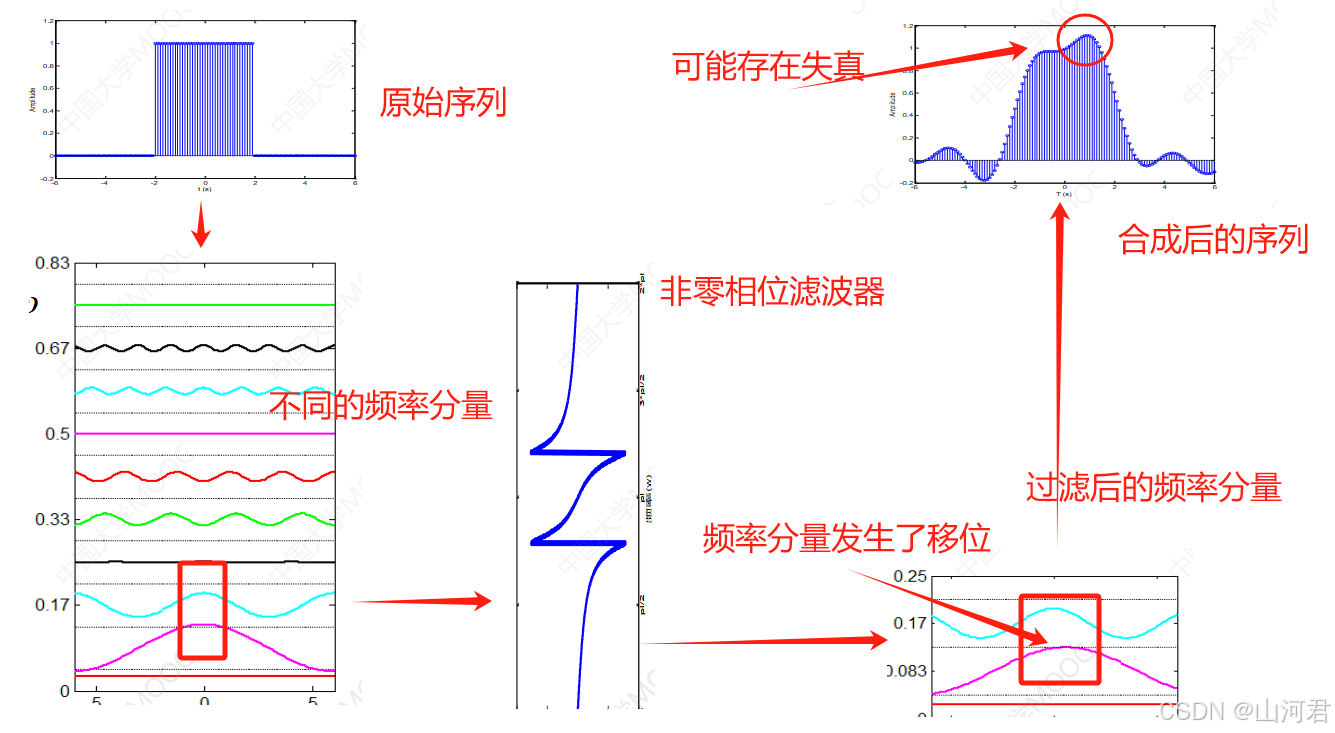
所以在频率响应中,如果 ∠ H ( e j ω ) = 0 \angle H(e^{j\omega}) = 0 ∠H(ejω)=0,即 e j ∠ H ( e j ω ) = 1 e^{j\angle H(e^{j\omega})}=1 ej∠H(ejω)=1时,这种不会频率分量在时域上的移位,叫做零相位滤波器。
4.群延迟
1)线性相位
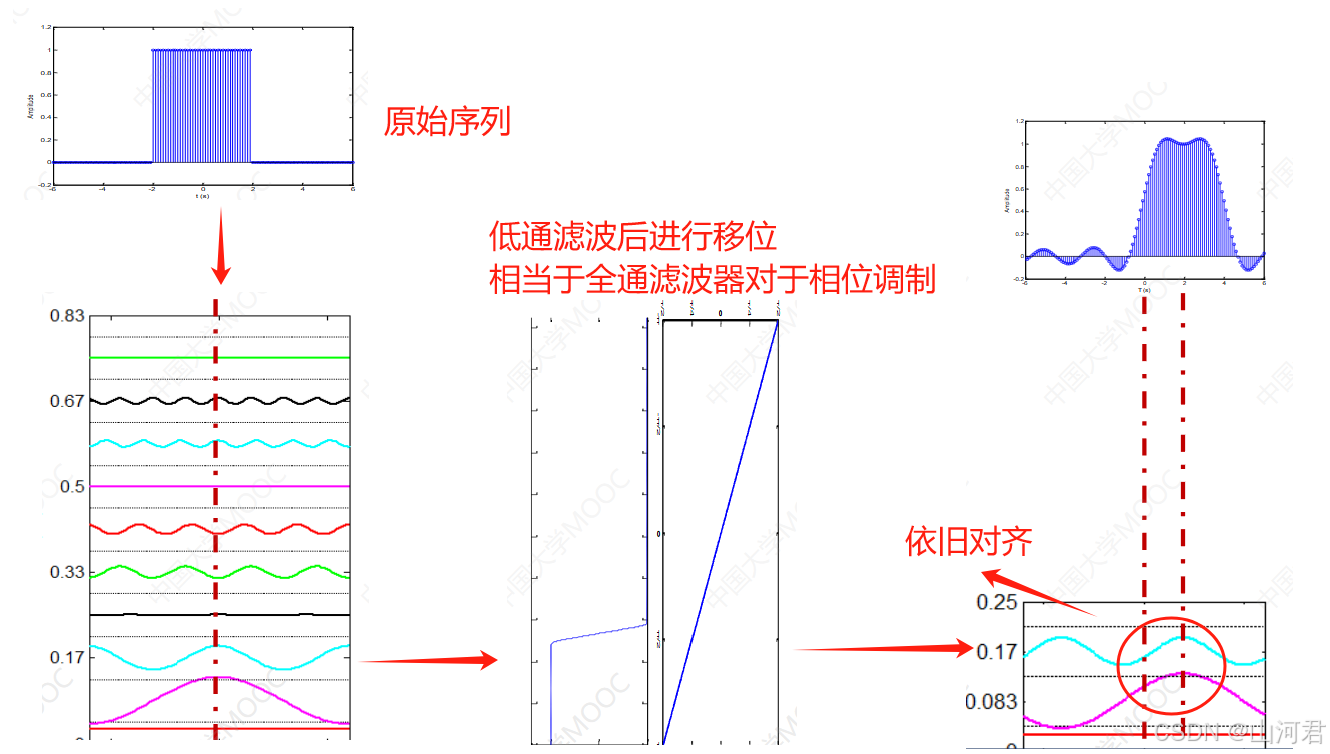
上文中,相频响应式用来分析一个系统不同频率分量上对于输入信号的相位影响。我们来看一下线性相位对于不同频率分量带来的影响。
线性相位指的是一个系统在频率响应中相位变化与频率之间是线性关系,即 ϕ = k f \phi=kf ϕ=kf,此时如果输入信号是两个不同频率的波组成:
x [ n ] = cos ( 2 π f 1 n ) + cos ( 2 π f 2 n ) x[n]=\cos(2\pi f_1 n)+\cos(2\pi f_2 n) x[n]=cos(2πf1n)+cos(2πf2n)
那么当系统的幅频响应是1,即对所有的频率分量增益为1,所以不需要考虑幅频响应,只考虑响应响应,那么对于经过线性相位有:
x [ n ] = cos ( 2 π f 1 n + k f 1 ) + cos ( 2 π f 2 n + k f 2 ) = cos ( f 1 ( k + 2 π n ) ) + cos ( f 2 ( k + 2 π n ) ) x[n]=\cos(2\pi f_1n + kf_1)+\cos(2\pi f_2n+ kf_2)=\cos(f_1(k+2\pi n) )+\cos( f_2(k+2\pi n)) x[n]=cos(2πf1n+kf1)+cos(2πf2n+kf2)=cos(f1(k+2πn))+cos(f2(k+2πn))
由于 k k k相同,那么对于频率分量 f 2 f_2 f2、 f 2 f_2 f2的波形起始点往后偏移 k k k,但是相对位置不变,所以不会引起相位失真。
如下图:
2)非线性相位
还是上文中的例子,假设现在相位变化和频率关系为 ϕ = k f 2 \phi=kf^2 ϕ=kf2,那么此时
x [ n ] = cos ( 2 π f 1 n + k f 1 2 ) + cos ( 2 π f 2 n + k f 2 2 ) = cos ( f 1 ( k f 1 + 2 π n ) ) + cos ( f 2 ( k f 2 + 2 π n ) ) x[n]=\cos(2\pi f_1n + kf_1^2)+\cos(2\pi f_2n+ kf_2^2) = \cos(f_1(kf_1+2\pi n) )+\cos( f_2(kf_2+2\pi n)) x[n]=cos(2πf1n+kf12)+cos(2πf2n+kf22)=cos(f1(kf1+2πn))+cos(f2(kf2+2πn))
由于对于对于频率分量 f 2 f_2 f2、 f 2 f_2 f2的波形起始点往后偏移分别是 k f 1 , k f 2 kf_1,k_f2 kf1,kf2所以相位的相对位置是发生了变化,容易引起失真。
如上文中的失真举例中的图片。
3)群延迟
所以通过上文我们知道,响应相频中相位对于频率变换的速率决定了相位延迟。这个变化速率实际上就是相频响应中线条的斜率,使用求导的方式可以得到。
τ g ( ω ) = − d ∠ ( H ( e j ω ) ) d ω \tau_g(\omega)=-\frac{d\angle(H(e^{j\omega}))}{d\omega} τg(ω)=−dωd∠(H(ejω))
如果此时所有的频率分量的 n d n_d nd为常数,那么它就是一个线性相位。
总的来说,幅频影响的是不同分量的大小,相频影响的是不同分量的延迟,群延迟影响的是相位线性度的度量。而相位变化越陡峭,表示信号的不同频率分量传播时间相差越大,即群延迟更大。如果相位响应是线性的,表示系统对所有频率分量的延迟是一样的,不会引入相位失真。
总结
本篇文章是对于LTI系统中卷积函数对于经过DTFT后频域上的特点进行介绍,其中有一类特定的输入序列,系统的输出为输入序列和某个复常数的乘积,这种我们称之为特征函数。
其次,对于卷积函数的频率响应的频域特征结合了实例进行介绍,主要包括幅频响应、相频响应以及群延迟,分别描述了幅度和频率的关系,相位和频率的关系,以及不通频率分量经过系统时由于相位导致的延迟。这是在对于在设计滤波器时,需要考虑的方面。
那么下一篇文章,将对于LTI系统中差分方程和频域做深入分析。
反正收藏也不会看,不如点个赞吧!