一、一键安装
目录
扫描二维码关注公众号,回复:
17644016 查看本文章

打开命令行,输入鱼香ROS快捷指令
wget http://fishros.com/install -O fishros && . fishros按照提示进行操作
二、命令行下载
1、 设置编码
查看编码
locale
更新软件源
sudo apt update && sudo apt install locales设置编码格式
sudo locale-gen en_US en_US.UTF-8sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8生效编码格式
export LANG=en_US.UTF-82、添加ROS2软件源
下载软件源和密钥的指令
sudo apt update && sudo apt install curl gnupg lsb-release设置下载软件源的密钥(有该密钥才可以访问ros2的软件源)、这一步可能会报错
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg 配置ros2软件源,把ros2软件源添加入系统列表
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null3、安装ROS2
扫描软件源地址
sudo apt update更新软件包
sudo apt upgrade桌面软件安装,上位机可视化软件等
sudo apt install ros-humble-desktop4、设置环境变量
只在当前终端生效,对新开的终端无效
source /opt/ros/humble/setup.bash对多终端生效,重启不会失效
echo"source /opt/ros/humble/setup.bash">> ~/.bashrc5、测试
C++通讯测试
ros2 run demo_nodes_cpp talker 
Python通讯测试
ros2 run demo_nodes_py listener 
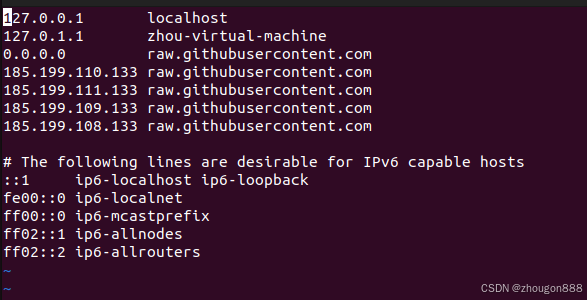
6、报错
进入My IP | IP Address Tools | IP Geolocation | Website Traffic Checker搜索raw.githubusercontent.com 的 IP 地址

在Ubuntu终端输入
sudo vi /etc/hosts加入IP地址(Vim的使用方式)
报错并退出
三、Ubuntu相关快捷键
系统级快捷键
- Ctrl + Alt + T:打开终端。
- Super(Windows键):打开活动概览。
- Super + D:显示桌面。
- Alt + F4:关闭当前窗口。
- Alt + Tab:切换应用程序窗口。
- Ctrl + Alt + Del:显示注销对话框。
- Super + L:锁定屏幕。
- Ctrl + Alt + L:锁定屏幕。
- Super + M:显示系统消息(通知)。
- Ctrl + Alt + Arrow keys:在多个工作区之间切换(如果启用工作区)。
- Super + Arrow keys:调整窗口的位置或大小(上下左右)。
窗口管理
- Alt + Space:打开当前窗口的菜单。
- Ctrl + W:关闭当前窗口标签(在支持标签页的应用中,例如浏览器)。
- Ctrl + Shift + T:打开一个新的终端标签。
- Super + ↑:最大化当前窗口。
- Super + ↓:恢复当前窗口(如果已经最大化)或最小化。
- Super + Left/Right Arrow:将窗口分别对齐到屏幕的左半部分或右半部分。
- Alt + F7:拖动窗口(使用键盘进行移动)。
- Alt + F8:调整窗口大小(通过键盘进行调整)。
终端相关快捷键
- Ctrl + Shift + C:复制终端中的文本。
- Ctrl + Shift + V:粘贴终端中的文本。
- Ctrl + A:将光标移动到行首。
- Ctrl + E:将光标移动到行尾。
- Ctrl + U:删除光标前面的文本。
- Ctrl + K:删除光标后面的文本。
- Ctrl + L:清空终端屏幕(类似
clear命令)。 - Ctrl + Z:暂停当前命令(可以用
fg恢复)。 - Ctrl + C:中止当前命令。
- Ctrl + D:退出终端(或者结束文件输入)。
- Ctrl + R:进行命令历史搜索。
- Ctrl + Shift + N:打开新终端窗口。
文件管理
- Super + E:打开文件管理器。
- Ctrl + N:打开一个新的文件管理器窗口。
- Ctrl + T:在文件管理器中打开一个新的标签。
- Ctrl + Shift + N:创建一个新的文件夹。
- F2:重命名选中的文件或文件夹。
- Ctrl + C:复制选中的文件或文件夹。
- Ctrl + X:剪切选中的文件或文件夹。
- Ctrl + V:粘贴复制或剪切的文件或文件夹。
- Delete:删除选中的文件或文件夹(会放入垃圾桶)。
- Shift + Delete:永久删除选中的文件或文件夹。
浏览器相关快捷键
- Ctrl + T:打开新的标签页。
- Ctrl + W:关闭当前标签页。
- Ctrl + Shift + T:重新打开最近关闭的标签页。
- Ctrl + Tab:切换到下一个标签页。
- Ctrl + Shift + Tab:切换到上一个标签页。
- Ctrl + L:聚焦地址栏。
- Ctrl + D:将当前页面添加到书签。
- Ctrl + H:打开浏览历史。
- Ctrl + J:打开下载页面。
其他常用快捷键
- Ctrl + P:打印当前页面(适用于支持打印的应用程序)。
- F11:切换全屏模式。
- Ctrl + + (加号):放大界面元素(例如网页或文档)。
- Ctrl + - (减号):缩小界面元素。
- Ctrl + 0:恢复默认的界面缩放。
Vim编辑器使用方式
1. Vim 模式
Vim 主要有三种模式:
- 普通模式(Normal Mode):用于移动光标、删除、复制等操作。
- 插入模式(Insert Mode):用于输入文本。
- 命令模式(Command Mode):用于执行保存、退出等命令。
默认启动时,你会进入普通模式。
2. 切换到插入模式
在普通模式下按 i 或 I(光标前插入、光标后插入)切换到插入模式。此时你可以输入文本。
- 按
Esc返回普通模式。
3. 在普通模式下移动光标
在普通模式下,你可以使用以下键移动光标:
h:向左移动j:向下移动k:向上移动l:向右移动w:跳到下一个单词的开头b:跳到前一个单词的开头0:跳到当前行的开头$:跳到当前行的结尾gg:跳到文件开头G:跳到文件末尾
4. 删除、复制、粘贴
- 删除:在普通模式下使用
x删除光标所在位置的字符,或使用dd删除当前行。 - 复制:使用
yy复制当前行,或者使用yw复制当前光标位置到单词的末尾。 - 粘贴:使用
p在光标后粘贴,使用P在光标前粘贴。
5. 保存文件
- 在普通模式下,输入
:w保存文件。
6. 退出 Vim
- 如果你没有做任何修改,可以直接输入
:q退出。 - 如果你已经修改了文件,并且想保存并退出,输入
:wq或:x。 - 如果你不想保存修改,可以输入
:q!强制退出。
7. 搜索和替换
- 搜索:按
/后输入搜索关键字,按n查找下一个匹配项,按N查找上一个匹配项。 - 替换:使用
:s/old/new/g替换当前行的所有old为new。可以加上g来表示全局替换,或者加上1,5来指定行号范围。
8. 撤销和重做
- 撤销:按
u撤销上一个操作。 - 重做:按
Ctrl + r重做撤销的操作。