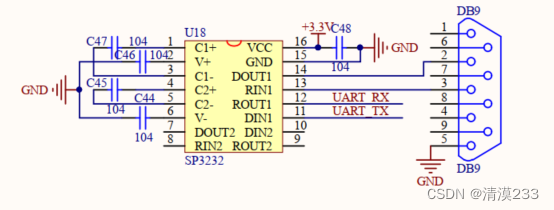
上图为芯片TTL电压转换为串口RS232电压,该DB9为母口,通过串口转USB线连接到电脑PC端上。
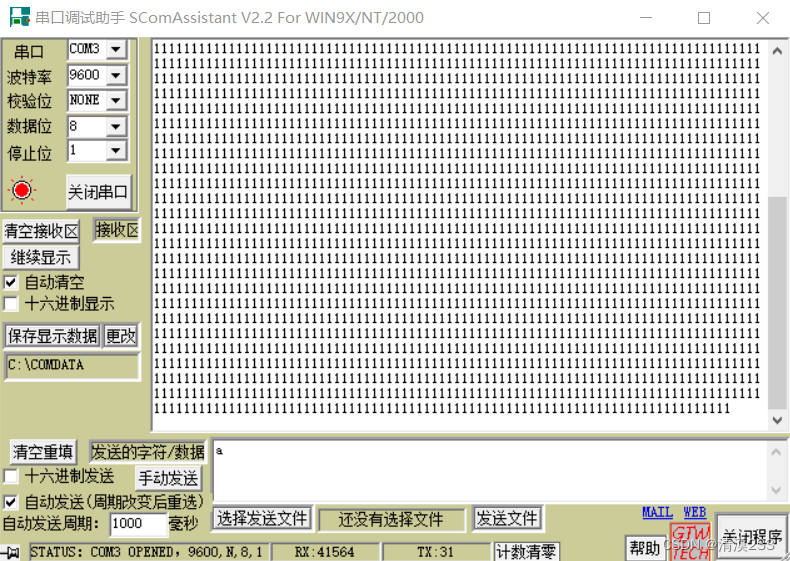
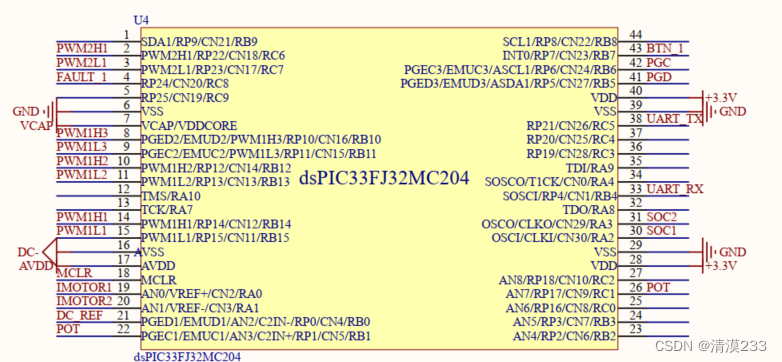
目的:使用dspic33fj32mc204与PC端进行通信,然后使用串口调试助手进行收发数据
程序如下(注意:下面程序与MIRCOCHIP公司的dspic33f系列数据手册的程序有些不同,是在它基础上的补充说明和改进bug):
#include "p33FJ32MC204.h"
#include "dsp.h"
#include <xc.h>
#include <PPS.H>
/*****************Config bit settings****************/
// FBS
#pragma config BWRP = WRPROTECT_OFF // Boot Segment Write Protect (Boot Segment may be written)
#pragma config BSS = NO_FLASH // Boot Segment Program Flash Code Protection (No Boot program Flash segment)
// FGS
#pragma config GWRP = OFF // General Code Segment Write Protect (User program memory is not write-protected)
#pragma config GSS = OFF // General Segment Code Protection (User program memory is not code-protected)
// FOSCSEL
#pragma config FNOSC = FRC //
#pragma config IESO = ON // 使用内部FRC振荡源启动器件,然后自动切换为就绪的用户选择的振荡器源 Internal External Switch Over Mode (Start-up device with FRC, then automatically switch to user-selected oscillator source when ready)
// FOSC
#pragma config POSCMD = XT //
#pragma config OSCIOFNC = OFF // OSC2 Pin Function (OSC2 pin has clock out function)
#pragma config IOL1WAY = OFF //
#pragma config FCKSM = CSECME //
// FWDT
#pragma config FWDTEN = OFF //
// FPOR
#pragma config FPWRT = PWR128 // POR Timer Value (128ms)
#pragma config ALTI2C = OFF // Alternate I2C pins (I2C mapped to SDA1/SCL1 pins)
#pragma config LPOL = ON // Motor Control PWM Low Side Polarity bit (PWM module low side output pins have active-high output polarity)
#pragma config HPOL = ON // Motor Control PWM High Side Polarity bit (PWM module high side output pins have active-high output polarity)
#pragma config PWMPIN = ON // Motor Control PWM Module Pin Mode bit (PWM module pins controlled by PORT register at device Reset)
// FICD
#pragma config ICS = PGD3 // Comm Channel Select (Communicate on PGC1/EMUC1 and PGD1/EMUD1)
#pragma config JTAGEN = OFF // JTAG Port Enable (JTAG is Disabled)
#define FCY 40000000
#define BAUDRATE 9600
#define BRGVAL ((FCY/BAUDRATE)/16)-1
unsigned int i;
void __attribute__((__interrupt__,no_auto_psv)) _U1RXInterrupt( void );
void __attribute__((__interrupt__)) _U1TXInterrupt( void );
void __attribute__((__interrupt__,no_auto_psv)) _T1Interrupt(void);
char ReceivedChar;
int main(void)
{
//Perform a clock switch to 40MIPS (80Mhz)外部晶振电路图上是7.3728MHZ(FIN)但是实际板子上是8MHZ
PLLFBD = 38; //M=PLLFBD+2 = 40
CLKDIVbits.PLLPOST = 0; //N2=2(PLLPOST+1) = 2
CLKDIVbits.PLLPRE = 0; //N1=PLLPRE+2 = 2
OSCTUN=0; // Tune FRC oscillator, if FRC is used
RCONbits.SWDTEN=0; // Disable Watch Dog Timer
//unlock OSCCON register
__builtin_write_OSCCONH(0x03);//切换到带PLL的主振荡器模式 经过测试 应该切换成功了
__builtin_write_OSCCONL(0x01);//时钟切换被使能,外设引脚未锁定,允许写入外设引脚选择寄存器,PLL处于失锁状态,禁止辅助振荡器,请求切换新的振荡器
//wait for clock to stabilize
while(OSCCONbits.COSC != 0b011);
//wait for PLL to lock
while(OSCCONbits.LOCK != 1) {};
//clock switch finished
TRISBbits.TRISB4 = 1;//RP4输入
TRISCbits.TRISC5 = 0;//RP21输出
TRISBbits.TRISB15 = 0;
TRISBbits.TRISB14 = 0;
//UART
//UART外设引脚选择
PPSUnLock;
RPINR18bits.U1RXR = 4;//UART1接收
_RP21R = 0b00011;//UART1发送
PPSLock;
//UART发送配置
//UxMODE UARTx模式寄存器
//_USIDL = 1;//器件进入空闲模式时,模块停止工作
//_UEN = 0;// 使能并使用 UxTX 和 UxRX 引脚; UxCTS、 UxRTS 和 BCLKx 引脚由端口锁存器控制
//_LPBACK = 0;//禁止环回模式
_ABAUD = 0;//禁止自动波特率使能位
//U1STAbits.UTXINV = 0;//UxTX的空闲状态为0
//_URXINV = 1;//UxRX的空闲状态为0
_BRGH = 0;//波特率选择为低速
U1BRG = BRGVAL;//波特率设置为9600
_PDSEL = 0;//8位数据,无奇偶校验位
_STSEL = 0;//1个停止位
//UxSTA UARTx状态和控制寄存器
U1STAbits.UTXISEL0 = 0b0;//当一个字符被传输到发送移位寄存器时,意味着发送缓冲器至少有一个单元为空,产生中断
U1STAbits.UTXISEL1 = 0b0;
//U1STAbits.UTXINV = 0;//UxTX的空闲状态为0
//U1STAbits.UTXBRK = 1;//发送间隔位,无论发送器状态如何,都将UxTX引脚驱动为低电平
//IPC3bits.U1TXIP = 3;//接收器自然优先级比发送器高
IEC0bits.U1TXIE = 1;
_UARTEN = 1;//使能UART1 当模块第一次使能时,用户应用程序应在ISR中清零U1TXIF位
_UTXEN = 1;//使能UART1发送器,由UARTx控制UxTX引脚,如果UTXISEL为00将UxTXIF位置1
/* wait at least 104 usec (1/9600) before sending first char */
for(i=0;i<4160;i++)
{
Nop();
}
U1TXREG = '1';
//UART接收配置
// IPC2bits.U1RXIP = 4;
IEC0bits.U1RXIE = 1;
IFS0bits.U1RXIF = 0;
U1STAbits.URXISEL = 0;
while(1)
{
/* check for receive errors */
if(U1STAbits.FERR == 1)//检测到当前字符的帧错误
{
continue;
}
/* must clear the overrun error to keep uart receiving */
if(U1STAbits.OERR == 1)//如果接收缓冲区已经溢出
{
U1STAbits.OERR = 0;//清零原来置1的OEER位将使接收缓冲区和RSR复位为空状态
continue;
}
/* get the data */
if(U1STAbits.URXDA == 1)
{
ReceivedChar = U1RXREG;
}
}
while(1);
return(0) ;
}
void __attribute__((__interrupt__,no_auto_psv)) _U1TXInterrupt(void)
{
IFS0bits.U1TXIF = 0;
for(i=0;i<4160;i++)
{
Nop();
}
U1TXREG = '1';
//PORTBbits.RB14 = !PORTBbits.RB14;
}
void __attribute__((__interrupt__,no_auto_psv)) _U1RXInterrupt(void)
{
IFS0bits.U1RXIF = 0;
if (ReceivedChar == 'a')
{PORTBbits.RB15 = !PORTBbits.RB15;}
}
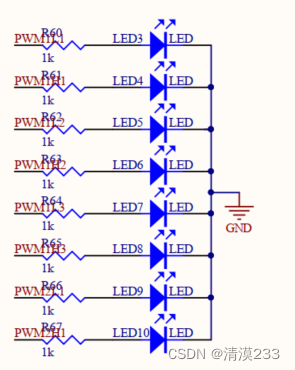
程序说明:配置UART的收发程序,电路板芯片通过串口和PC进行通信,发送字符1到PC端,PC端也可发送字符a到芯片,如果接收到了正确的字符a,那么RB15对应的LED灯亮或灭。
下面是PC端接收和发送: