浩瀚的海洋覆盖了地球表面超过70%的面积,不仅蕴藏着丰富的油气、矿产、生物等自然资源,还具备巨大的战略和经济价值。然而,人类对海洋的认知依然有限,尤其是在深海区域,复杂的地形地貌、变化莫测的海况环境、通信与定位的技术瓶颈,依然是制约海洋开发利用的重要难题。
作为世界陆地面积第三大的国家,中国拥有世界最长的海岸线,总长度达3.2万公里。这一“海疆大国”的身份,决定了中国对海洋资源开发与海上战略布局的需求格外迫切。随着国家海洋强国战略的持续推进,建设海洋平台、铺设海底光缆、开凿海底隧道等高难度工程逐渐成为现实。而要在水下精准作业,定位技术的支撑作用举足轻重。
01.水声定位系统
在陆地和天空中,人类早已依赖全球导航卫星系统(如全球定位系统Global Positioning System,GPS)完成了高精度、高实时性的定位与导航。然而,一旦深入海底,电磁波传播能力衰减极快,传统卫星定位技术失效。此时,水声成为信息传递的唯一选择。基于水声通信的定位系统应运而生,成为水下工程、科学探测以及海洋资源开发的关键技术之一。
尤其是在无人水下航行器(Unmanned underwater vehicle,UUV)越来越普及的背景下,水声定位系统的重要性日益凸显。UUV能够深入复杂或危险海域进行测绘、目标探测、结构检查等任务,但其前提是必须具备高可靠性、高精度的自主定位和通信能力。这就对水声定位系统提出了更高的要求。
船载水声定位系统的核心是信号处理平台。它既是整个定位系统的数据中枢,也是信息控制的“大脑”。通过对接收信号的解析、计算和指令分发,保证各个传感器、换能器、通信模块之间的高效协同。
02.国外水声定位技术的格局
相较而言,国外在水声定位技术领域起步早、基础好,已经形成了较为成熟的产业链和产品体系。比如英国Sonardyne公司推出的Fusion系统,以及挪威Simrad公司的HIPAR 408S,都采用长基线(LBL)定位方式,在海底精密作业中被广泛应用。
此外,澳大利亚Nautronix公司的NASBeam和挪威Kongsberg的HAIN LBL产品,则展现了短基线(SBL)、超短基线(USBL)技术的快速部署与高精度优势。其中,Kongsberg的融合方案通过USBL与LBL联合定位,实现了在动态海洋环境下对水下目标的稳定追踪。
这些系统普遍具备体积小、定位准、适配强的特点,服务于油气开采、军事侦察、深海探索等领域,是现代海洋技术力量的重要体现。
03.中国自主技术的奋起直追
近年来,得益于“863计划”等国家重点研发计划的推动,中国在水声定位技术方面实现了从“跟跑”到“并跑”的重大跃升。早期由哈尔滨工程大学研制的GRAT系统,是我国第一套高帧率无线电遥控浮标阵水声跟踪定位系统,迈出了自主研发的第一步。
此后,基于“长程超短基线定位系统”的研发成果,我国成功构建起首套具备自主知识产权的深水高精度USBL定位系统。这一技术突破不仅在“蛟龙号”、“发现号”等重大海洋工程中得到应用,也标志着国产系统初步实现了对关键技术的掌控。
如今,包括哈尔滨工程大学、厦门大学、中科院声学所、中船重工等一批高校与科研机构,已形成较为完整的水声定位技术研究体系,并在国内外多个海洋工程项目中崭露头角。
04.持续发展中的挑战与突破
水声定位系统正朝着“更小型、更智能、更高效”的方向演进。但在实践中,系统集成复杂、通用性不足、开发难度高的问题仍是技术瓶颈。
目前主流方案多依赖FPGA+DSP组合控制,这种架构虽然性能强大,但在多任务调度、能耗控制、系统扩展等方面存在天然劣势。一方面,硬件架构高度专用化,修改成本高,资源复用率低;另一方面,设备间接口协议缺乏统一标准,极大限制了系统的模块化设计和快速部署能力。
为了解决上述问题,仿真技术被引入水声设备的研发流程中,推动了嵌入式系统从传统开发方式向虚拟原型构建和调试的范式转变。
天目全数字实时仿真软件SkyEye,支持多种主流处理器架构(如DSP、PowerPC、ARM、MIPS等)与设备接口模型,允许用户搭建接近真实运行环境的系统模型。在此基础上,开发者可以进行水声设备系统级、模块级仿真,应用软件调试,工程配置验证等多种任务,显著提升研发效率和系统可靠性。
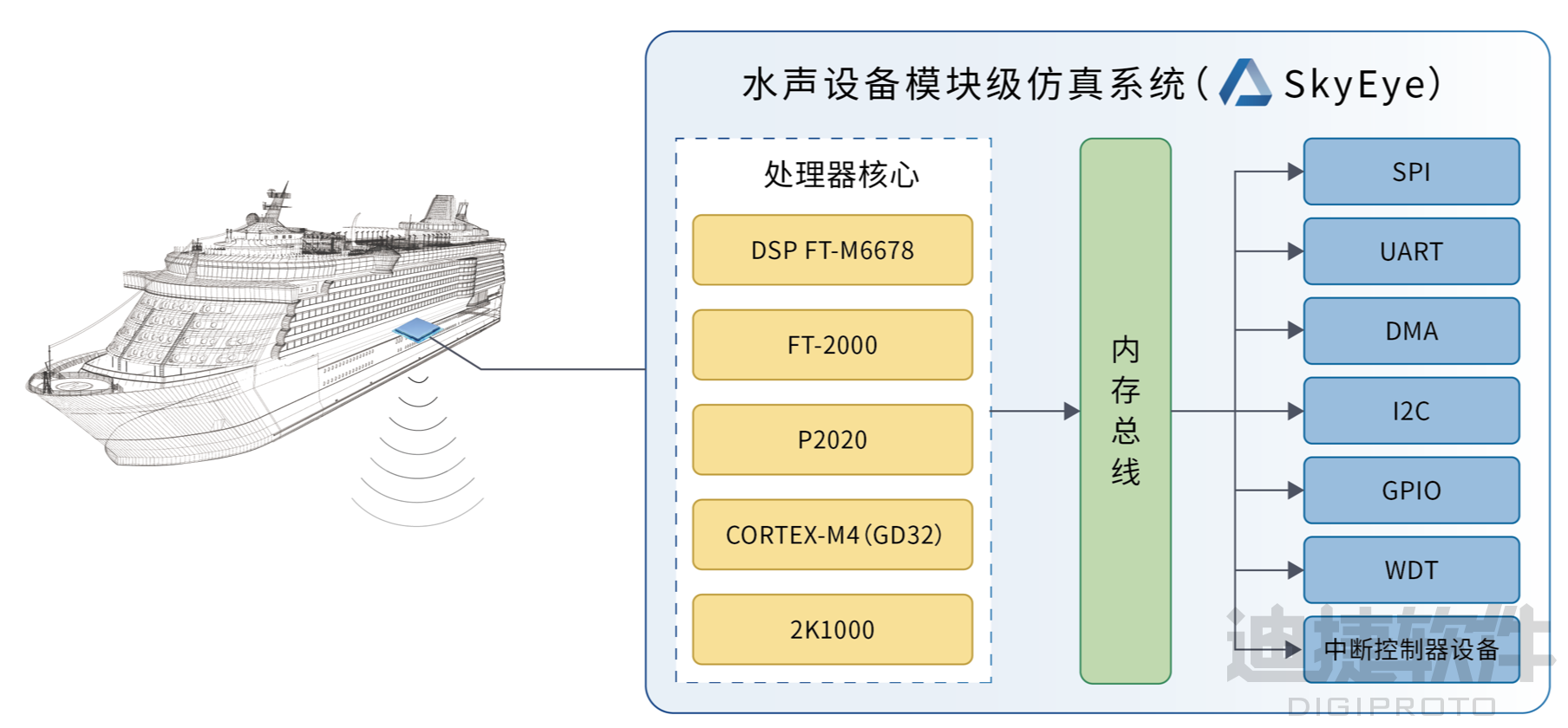
▲SkyEye水声设备模块级软硬件集成仿真案例
这种方式使得水声定位系统的开发更具灵活性和适应性,特别适用于需求快速变化、环境复杂苛刻的水下应用场景。
参考文献
[1] 段佳雨.船载水声定位系统信号处理平台设计[D].哈尔滨工程大学,2024.DOI:10.27060/d.cnki.ghbcu.2024.000738.
[2] 无人水下航行器:解锁海洋深处的未知世界