版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/JDWell/article/details/82938875
串口简介

串行接口(Serial port)又称“序列端口”,主要用于串行式逐位数据传输。常见的有一般计算机应用的RS-232(使用 25 针或 9 针连接器)和工业计算机应用的半双工RS-485与全双工RS-422。
串口编程
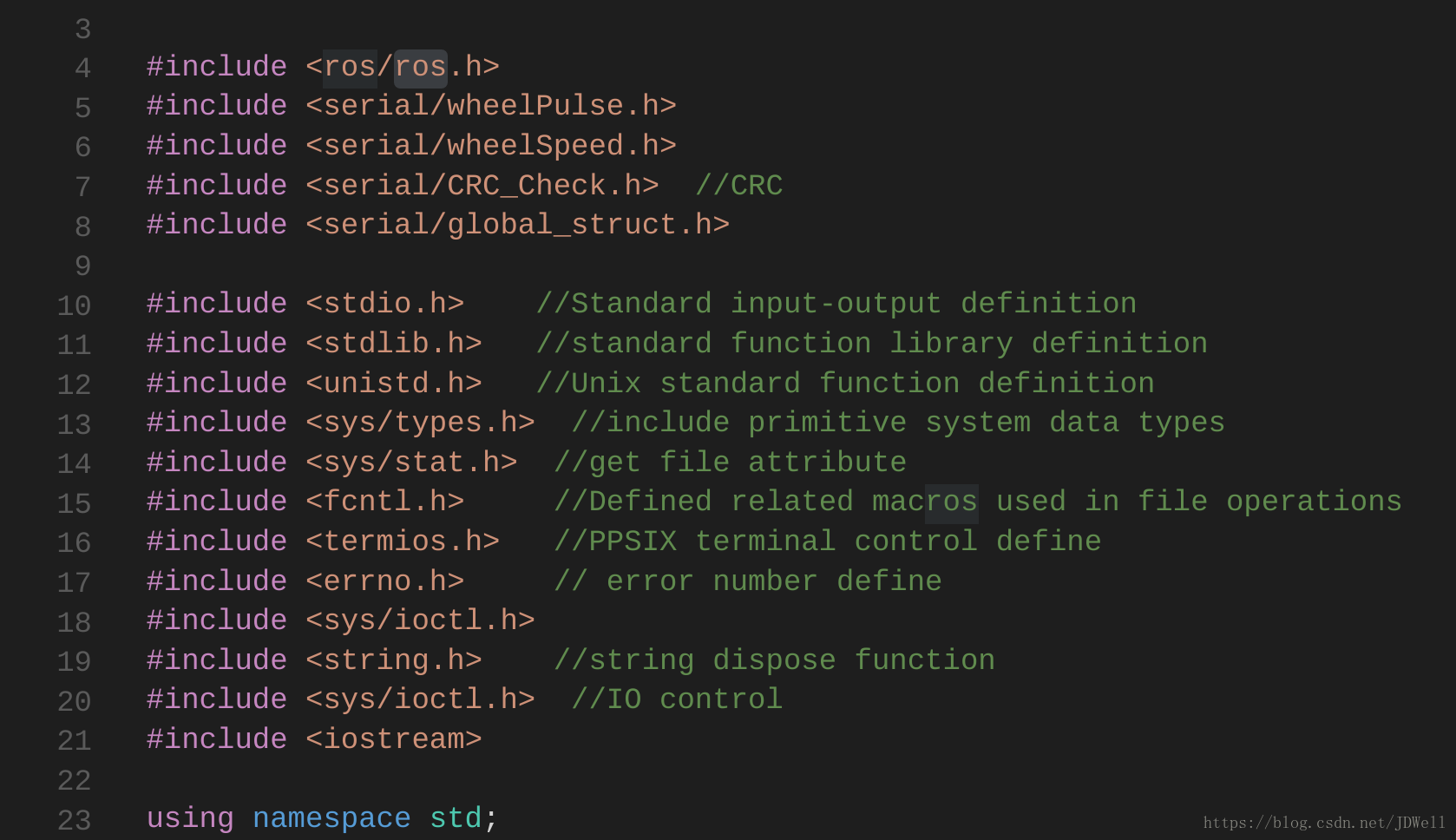
1、本文串口操作需要的头文件
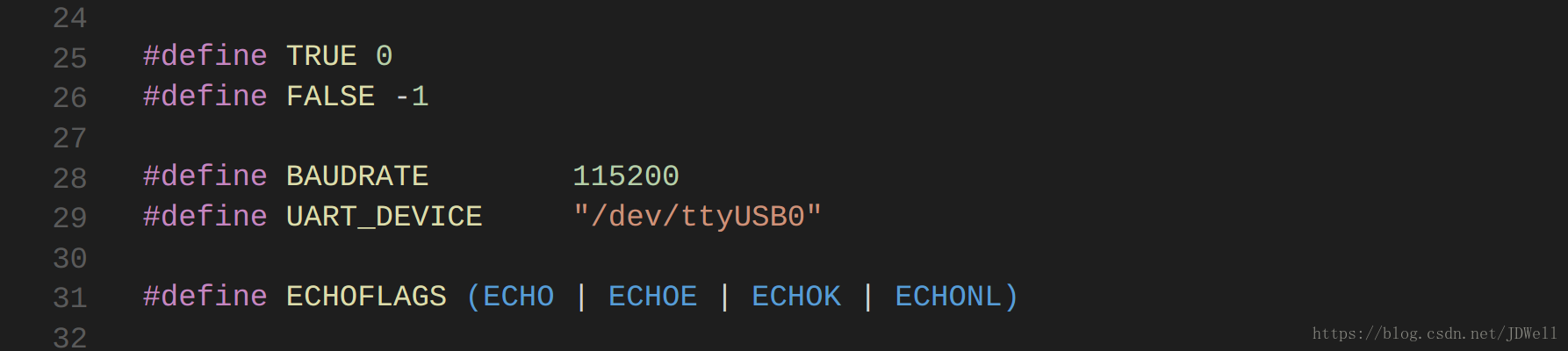
2、宏定义
查看设备:ls /dev/ttyUSB*
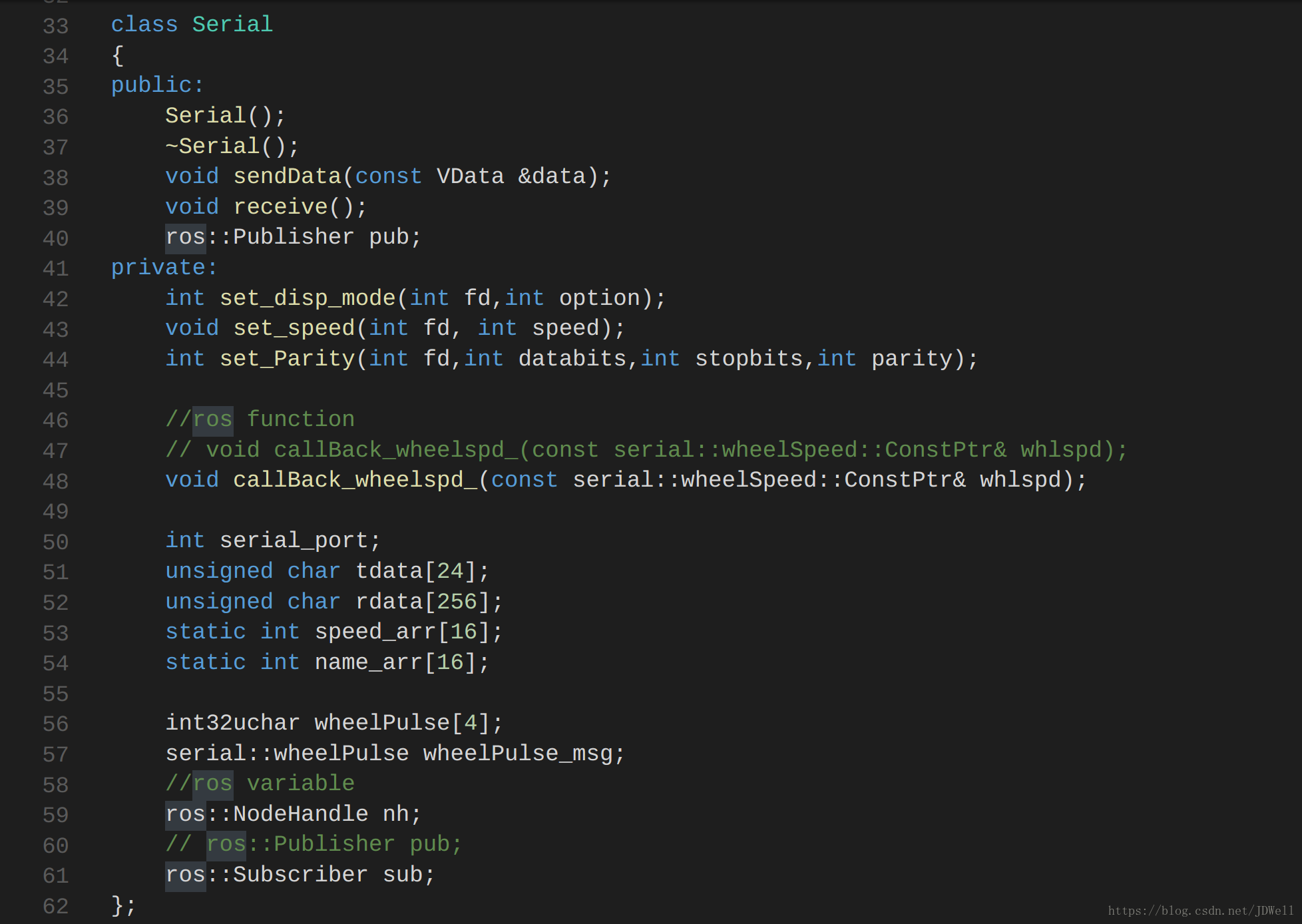
3、类内声明
4、串口通信解析
打开串口

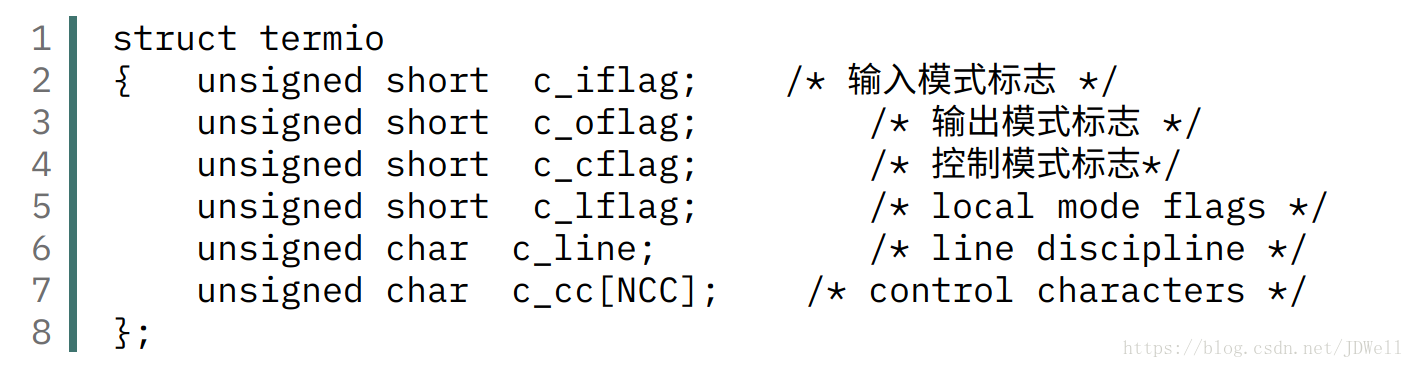
设置串口:包括波特率、校验位、停止位及struct termios结构体成员
struct termios成员:
波特率设置

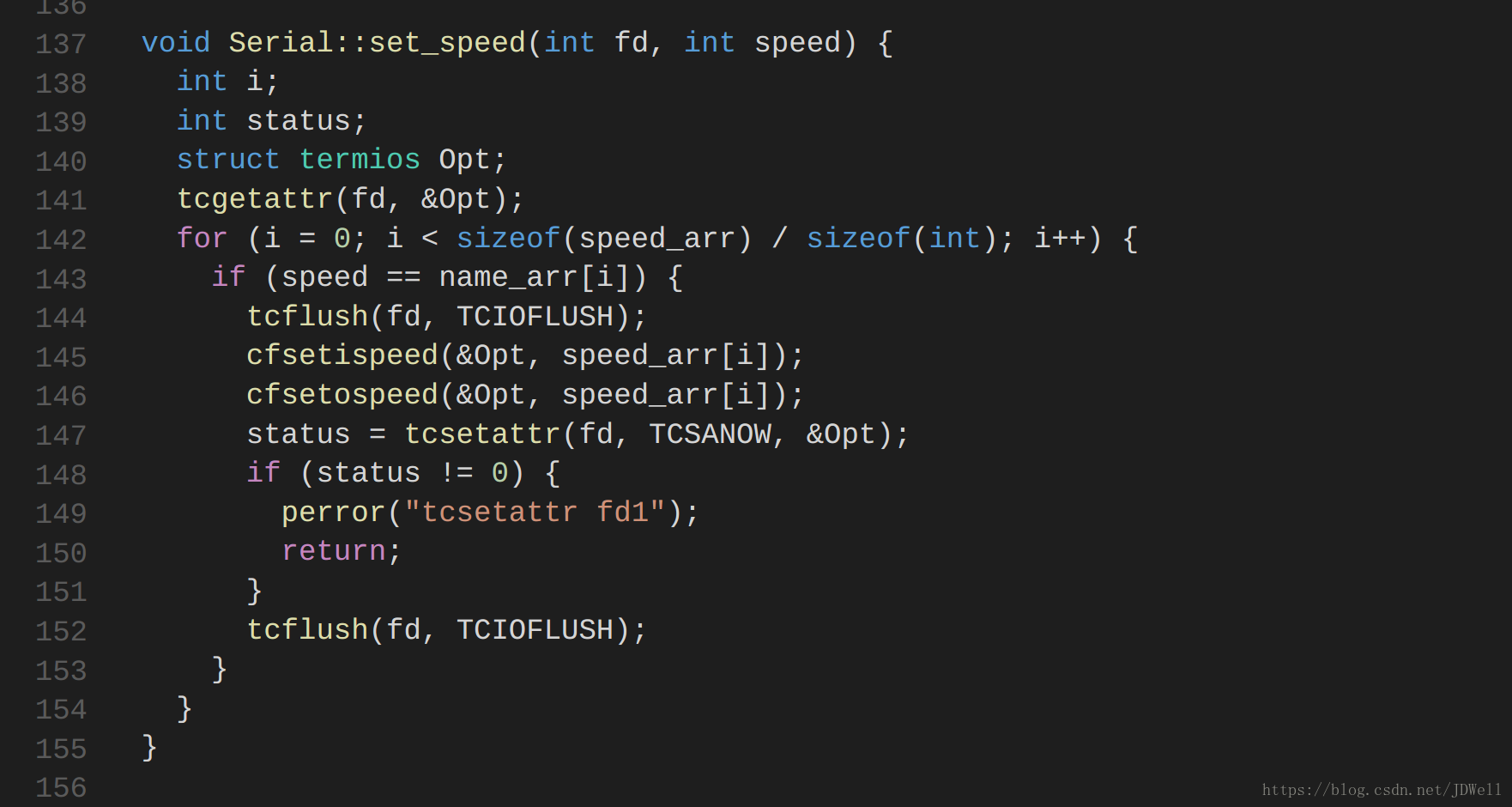
这个function用来设置串口通信速率,参数fd是打开串口文件的句柄,参数speed是波特率。
数据位、校验位、停止位设置

[注意]如果 不是开发终端之类的,只是串口传输数据,而不需要串口来处理,那么使用原始模式(Raw Mode)方式来通讯,设置方式如下:
读写串口
通过串口发送数据:

通过串口读取数据:

关闭串口

参考文章:https://www.ibm.com/developerworks/cn/linux/l-serials/index.html