1, the shortest path concept:
1 route, to the other vertices in a directed graph from the vertex (vertex start) (end apex), which is the weighted sum and a minimum path;
2, the problem formulation:
1, given a weighted directed graph G to the starting vertex v, G v to request from the other vertex of the shortest path (on each side there is a meaningful weight);
2, Dijkstra core algorithm is to find the shortest path through the unknown known shortest path;
3. Solutions:
1, Dijkstra proposed by ascending order of path length, gradually results in the shortest path;
1, one first obtains the shortest length of the shortest path, then it is determined with reference to a short length of time a shortest path, and so on, until the starting vertex v to vertex of each other all the shortest path is obtained so far;
2, the core is by a recursive manner starting from the vertex to each of the shortest path seek out all other vertices;
4, ready to work:
1, the auxiliary array: Array <E> dist;
1, dist [i] from the starting vertex v0 represents the current path length to the vertex vi;
2, initial settings:
1, when the starting vertex to the vertex v0 vi edged: dist [i] for the edge weight;
2, when starting from the vertex to the vertex v0 vi infinity: dist [i] to infinity;
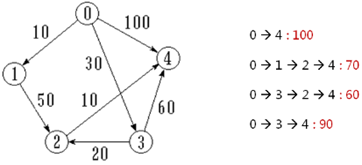
5, Dijkstra algorithm demo:

1, the basic definition found non-empty set of vertices and edges of a set of two graphs, the analysis algorithm of FIG importance set in, and usually set in a data structure array;
2, each concerned with just joined the vertex S set of connections to other vertices, the shortest path value just determined to find the shortest possible path to reach a value other vertex, which is the core;
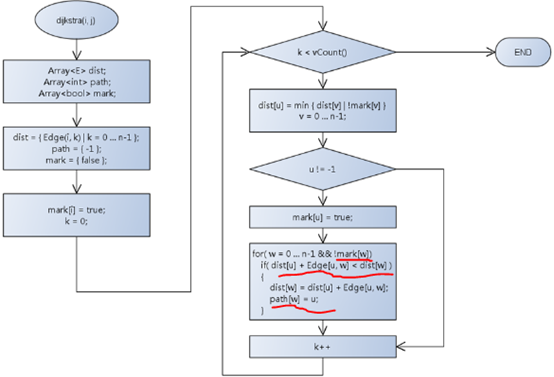
6, Dijkstra algorithm steps:

7, Dijkstra algorithm essence:
1, the vertex S set in the shortest path is already found vertices;
2, v0 to w shortest path only through vertices within the set S;
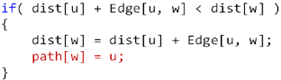
3, dist [w] may change:

8, how to record each vertex on the shortest path?
1, the definition of an auxiliary array:
1,Array<int> path;
1, path [i] denotes the i precursor vertexes on the current path;
2, Initialization: path = {-1};
3. Review:
9, Dijkstra algorithm flow chart:
10, Dijkstra shortest path algorithm:
1 / * two shortest paths between vertices returned array represents the shortest path above two vertices * / 2 SharedPointer <the Array < int >> Dijkstra ( int I, int J, const E & the LIMIT) // (n-O * n-) . 3 { . 4 LinkQueue < int > RET; // save the shortest path over the vertex . 5 . 6 IF (( 0 <= I) && (I <VCount ()) && ( 0 <= J) && (J < VCount ( ))) . 7 { . 8 DynamicArray <E> dist (VCount ()); // for storing values path 9 DynamicArray < int > path (VCount ()); // for storing the precursor node of the current node 10 DynamicArray < BOOL > Mark (VCount ()); // flag whether the vertex set into the S . 11 12 is / * materials initialization * / 13 is for ( int K = 0 ; K <VCount (); K ++ ) 14 { 15 Mark [K] = to false ; // vertex S set in no 16 path [K] = - . 1 ; // path no vertices precursor 17 18 dist [K] = isAdjacent (I, K) (path [K] =? I, getEdge (I, K)): the LIMIT; // If the initial node and the other node has connected, it is set to the right edge value, otherwise the taste infinity; but also update the path array, comma expression k precursor current vertex is a vertex I 20 is } 21 is 22 is Mark [I] = to true ; // the initial set of vertices in S 23 is 24 / * big loop * / 25 for ( int K = 0 ; K <VCount (); K ++ ) 26 is { 27 E m = the LIMIT; 28 int U = - . 1 ; 29 30 / *Traverse dist array, found in the non-S set to the minimum path value vertex S set * / 31 is for ( int W = 0 ; W <VCount (); W ++ ) 32 { 33 is IF ! (Mark [W] && (dist [W] <m)) // not find the minimum value of S dot marks set, updating a small value is to find the minimum value of the path 34 is { 35 m = dist [W]; // find the minimum value of the path 36 U W =; // shortest path of the recording apex 37 } 38 } 39 40 / * determine whether the minimum path is found, to prevent the edges not only vertex * / 41 is iF(U == - . 1 ) 42 is { 43 is BREAK ; // only node without edges, the shortest path between two o'clock not found, because the arrays are dist theoretical maximum, can not find the minimum value, directly out 44 } 45 46 is Mark [u] = to true ; // concentration values found path corresponding to the non-vertex u S is the minimum value, into a set of S 47 48 / * core algorithms: a path by known, Release S S set to a non-set of vertices the shortest path from u to push the newly added; w non-point S set in here, its traverse; S into the set of all vertices in time, the algorithm ends * / 49 for ( int w = 0 ; w <VCount (); W ++ ) 50 { 51 is / *In the starting vertex i to vertex u based on the shortest path, to the other vertices to compute the minimum path is obtained by known shortest path, if smaller, dist update array, where W is the minimum weight of vertex u adjacent vertices, as long as the smaller, it is necessary to update * / 52 is IF (! Mark [W] && isAdjacent (U, W) && (dist [U] + getEdge (U, W) < dist [W])) 53 is { 54 is dist [W] = dist [u] + getEdge (u, W); 55 path [W] = u; // this precursor vertexes are a vertex u represents 56 is } 57 is } 58 } 59 60 LinkStack < int > S; 61 is 62 is s.push (J); //Terminating the first vertex j placed on the stack; 63 is 64 / * from the start vertex i to vertex j of the final value to go into the stack; predecessor node access method, as the position value; value is the apex of the foregoing, Therefore, the value of the press-fitted directly into the stack * / 65 for ( int K = path [J]; K = -! . 1 ; K = path [K]) 66 { 67 s.push (K); 68 } 69 70 / * order of vertices is stored in reverse path through the stack transit, adjust over; * / 71 is the while (s.size ()> 0 ) 72 { 73 is ret.add (s.top ()); 74 75 s.pop (); 76 } 77 } 78 the else 79 { 80 throw_exception (InvalidParameterException, " Index <i, j> IS invalid ... " ); 81 } 82 83 / * final shortest path experiences Vertices at least 2, i to j is otherwise unreachable , the maximum number of vertices is not known * / 84 IF (ret.length () < 2 ) 85 { 86 throw_exception (an ArithmeticException, " There iS nO path from I to J ... " ); 87 } 88 89 return toArray (RET); //Placed inside the array 90 }
11, Dijkstra shortest path algorithm test code:
1 #include <iostream> 2 #include "MatrixGraph.h" 3 #include "ListGraph.h" 4 5 using namespace std; 6 using namespace DTLib; 7 8 template< typename V, typename E > 9 Graph<V, E>& GraphEasy() 10 { 11 static MatrixGraph<4, V, E> g; 12 13 g.setEdge(0, 1, 1); 14 g.setEdge(0, 2, 3); 15 g.setEdge(1, 2, 1); 16 g.setEdge(1, 3, 4); 17 g.setEdge(2, 3, 1); 18 19 return g; 20 } 21 22 template< typename V, typename E > 23 Graph<V, E>& GraphComplex() 24 { 25 static ListGraph<V, E> g(5); 26 27 g.setEdge(0, 1, 10); 28 g.setEdge(0, 3, 30); 29 g.setEdge(0, 4, 100); 30 g.setEdge(1, 2, 50); 31 g.setEdge(2, 4, 10); 32 g.setEdge(3, 2, 20); 33 g.setEdge(3, 4, 60); 34 35 return g; 36 } 37 38 int main() 39 { 40 Graph<int, int>& g = GraphComplex<int, int>(); 41 SharedPointer< Array<int> > p = g.dijkstra(0, 4, 65535); 42 43 for(int i=0; i<p->length(); i++) 44 { 45 cout << (*p)[i] << " "; 46 } 47 48 cout << endl; 49 50 return 0; 51 }
12 Summary:
1, Dijkstra shortest path algorithm is based on the idea of recursive completed;
2, the starting vertex to another vertex of each shortest path is obtained by dynamic derivation;
3, not only the shortest path vertices labeled by the tagged vertices calculation results;
4, the final result of the algorithm that the start vertex to the other vertices of each shortest path;