Tout d'abord, permettez-moi de déclarer que ce projet est basé sur le [Tutoriel d'introduction du bras robotique ROS] du Kazakhstan UP à la station B. Au début, il reproduira [La vision du bras robotisé de la théorie au combat pratique]
. est l'affichage de réalisation par étapes et la technologie de sa carrière de diplômé Partager, toutes les données et le code sont open source. Alors Pengpeng, je le reproduis ici à nouveau. Le matériel que j'utilise est différent de celui-ci. Le maître UP utilise UR5, et mon laboratoire utilise UR3. Les matériaux pertinents UR3CB3.12 sont listés ci-dessous : https : //www.universal
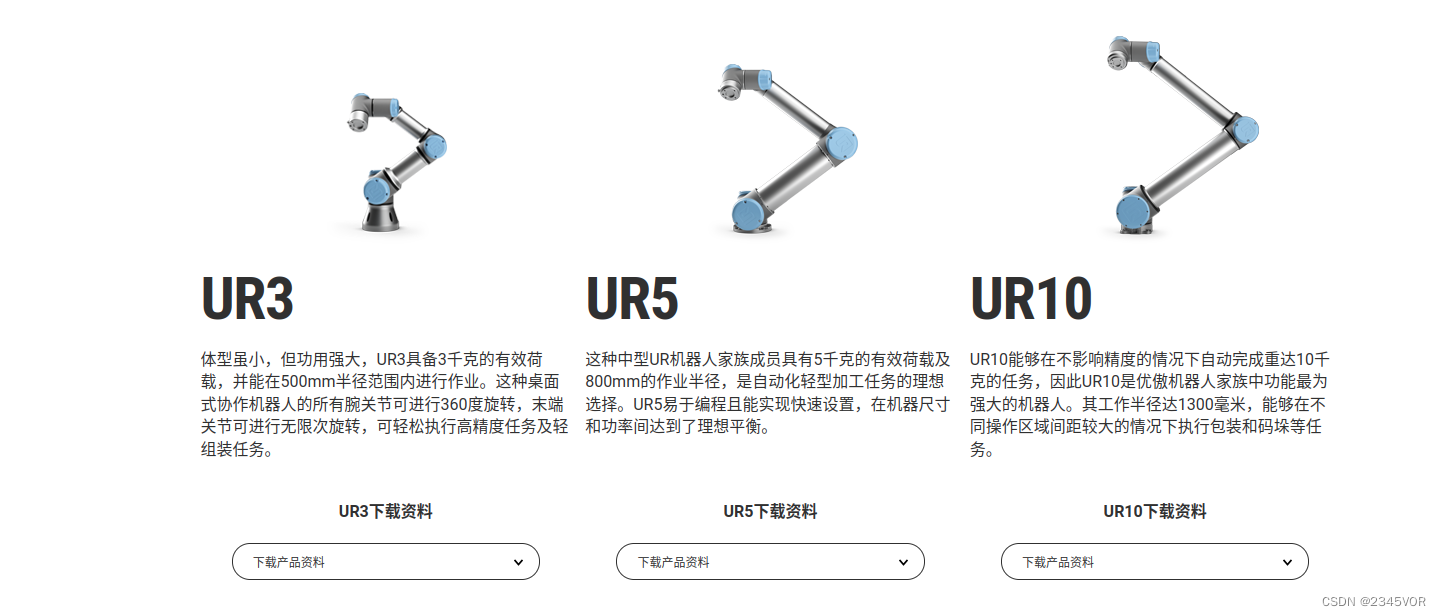 -robots . cn/cb3/
-robots . cn/cb3/
[mise à niveau du système UR3 vers CB3.12 avec URcap1.05]
prise en charge matérielle
| numéro de série | nom | Fonction |
|---|---|---|
| 1 | Bras robotisé UR3 | exécuteur de toutes les actions |
| 2 | D435i | les yeux de l'exécuteur |
| 3 | Environnement d'apprentissage en profondeur Ubuntu | cerveau de la pensée exécutive |
| 4 | Plate-forme de saisie d'avion | Environnement d'exploitation expérimental |
| 5 | Tableau d'étalonnage en damier noir et blanc 6*6 | Étalonnage de l'œil de la caméra à l'extérieur de la main |
| 6 | Petit cube d'impression 3D 3x3x3cm | acteur d'artefact |
Le code prend en charge
le lien version3.0 du didacticiel d'entrée du bras robotique ros :
lien : https://pan.baidu.com/s/1KFLQXVWShG5KfroCd6eM0A=8888
code d'extraction : 8888 [tutoriel d'entrée du bras robotique ROS - petit cinq] lien
PPT : https :/ /pan.baidu.com/s/18ierKnf8OJPPvGn8uOf1hw=8888 Code d'extraction : 8888
1. Vue d'ensemble
[Tutoriel principal Autolabor] Premiers pas avec les robots ROS
Tutoriel de démarrage rapide du système d'exploitation du robot ROS

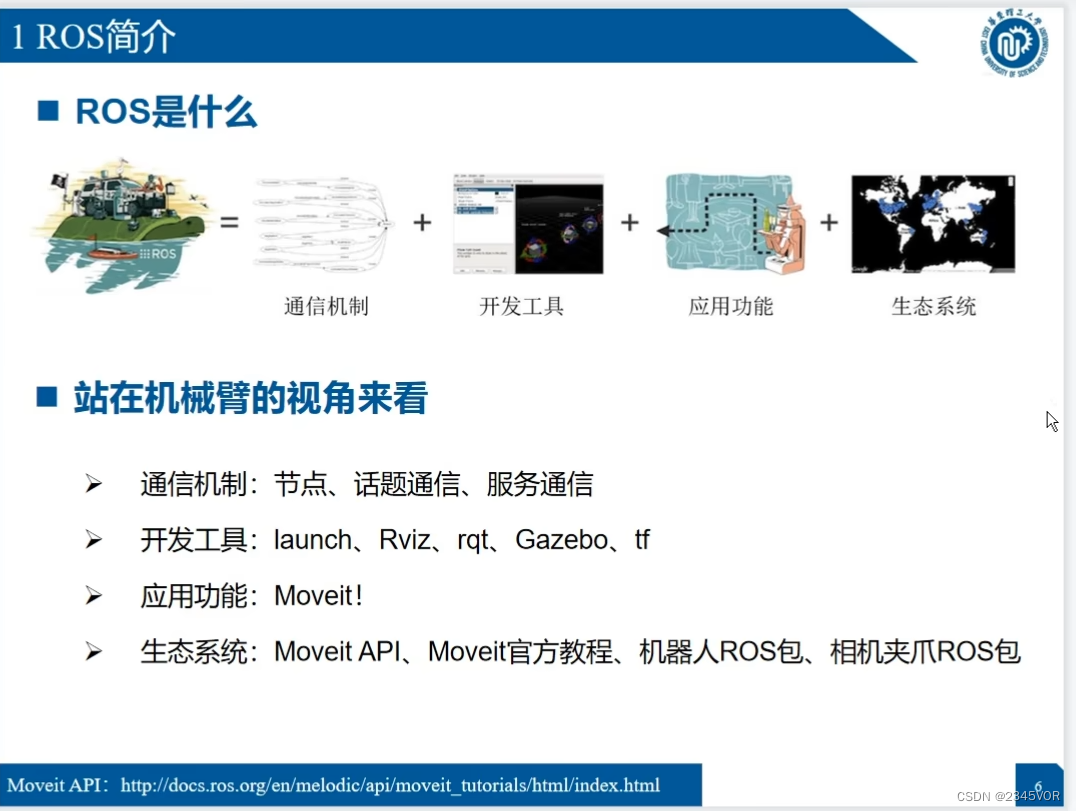
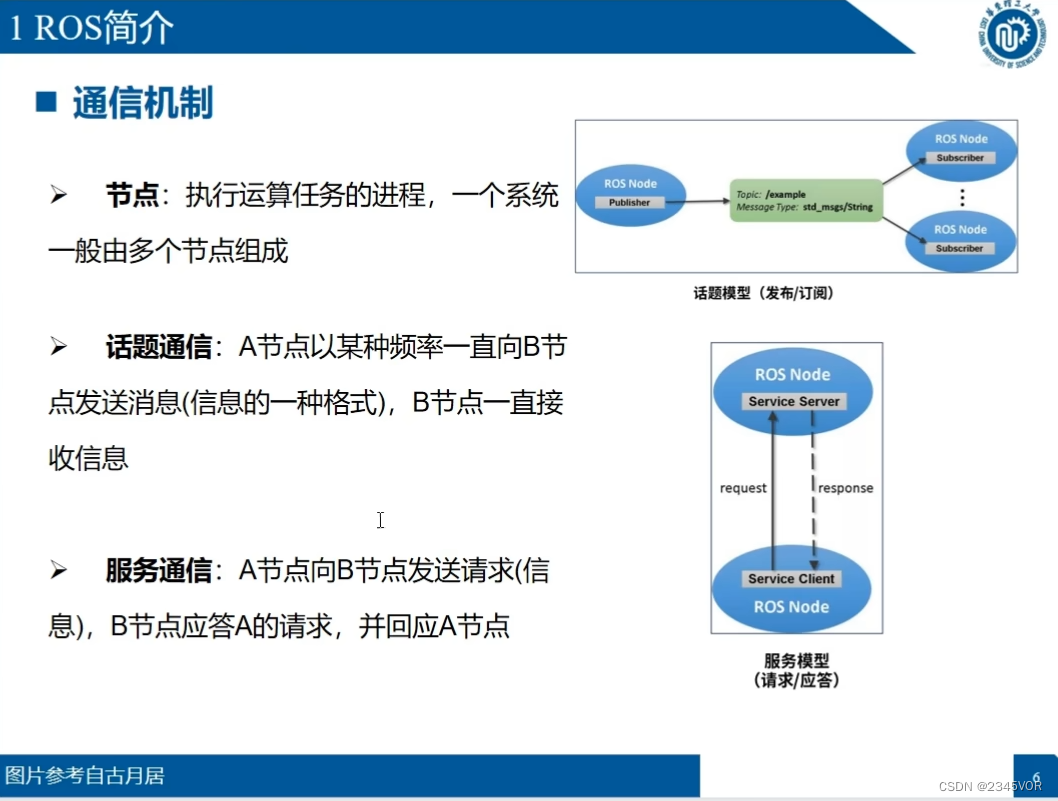
2. Présentation du ROS
2.1 Présentation du ROS
Site officiel de ROS : http://wiki.ros.org/

 adresse autolabor : http://www.autolabor.com.cn/book/ROSTutorials/
adresse autolabor : http://www.autolabor.com.cn/book/ROSTutorials/

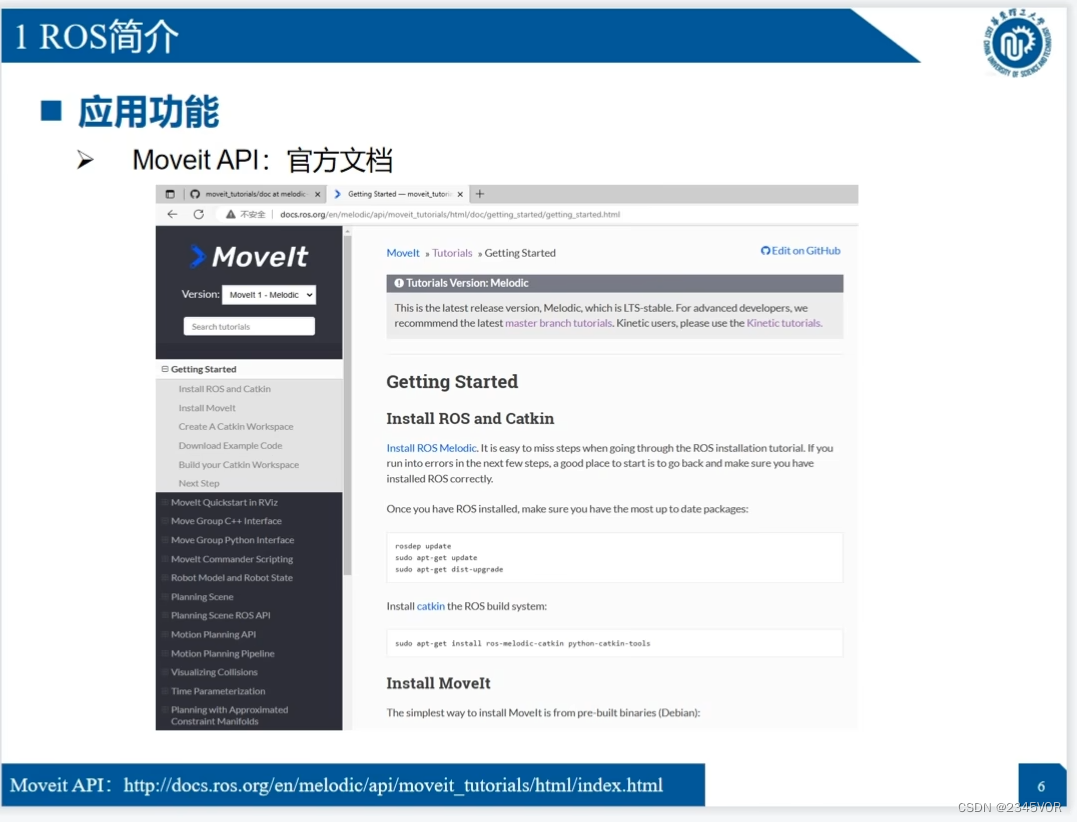
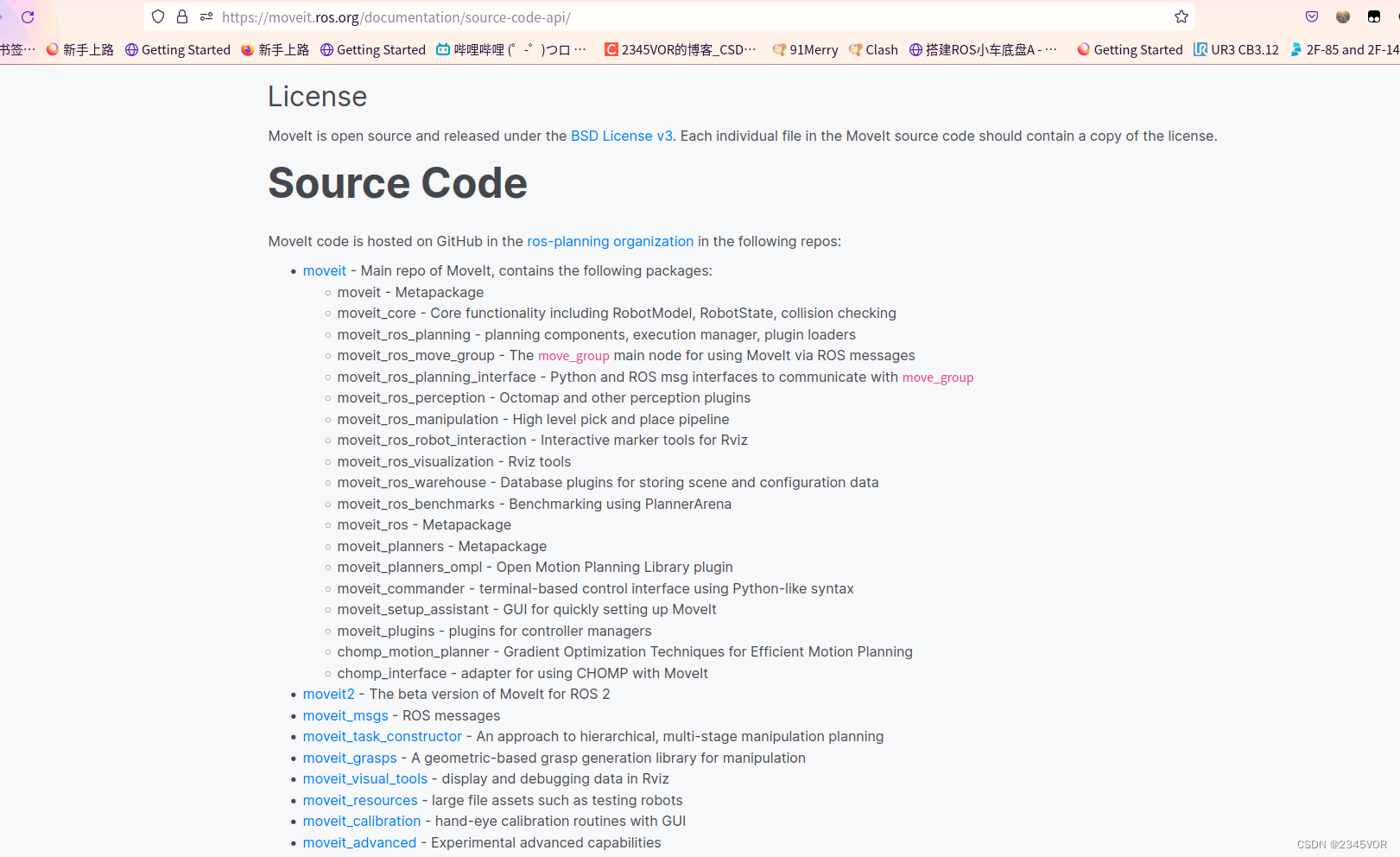
API Moveit : https://moveit.ros.org/documentation/source-code-api/
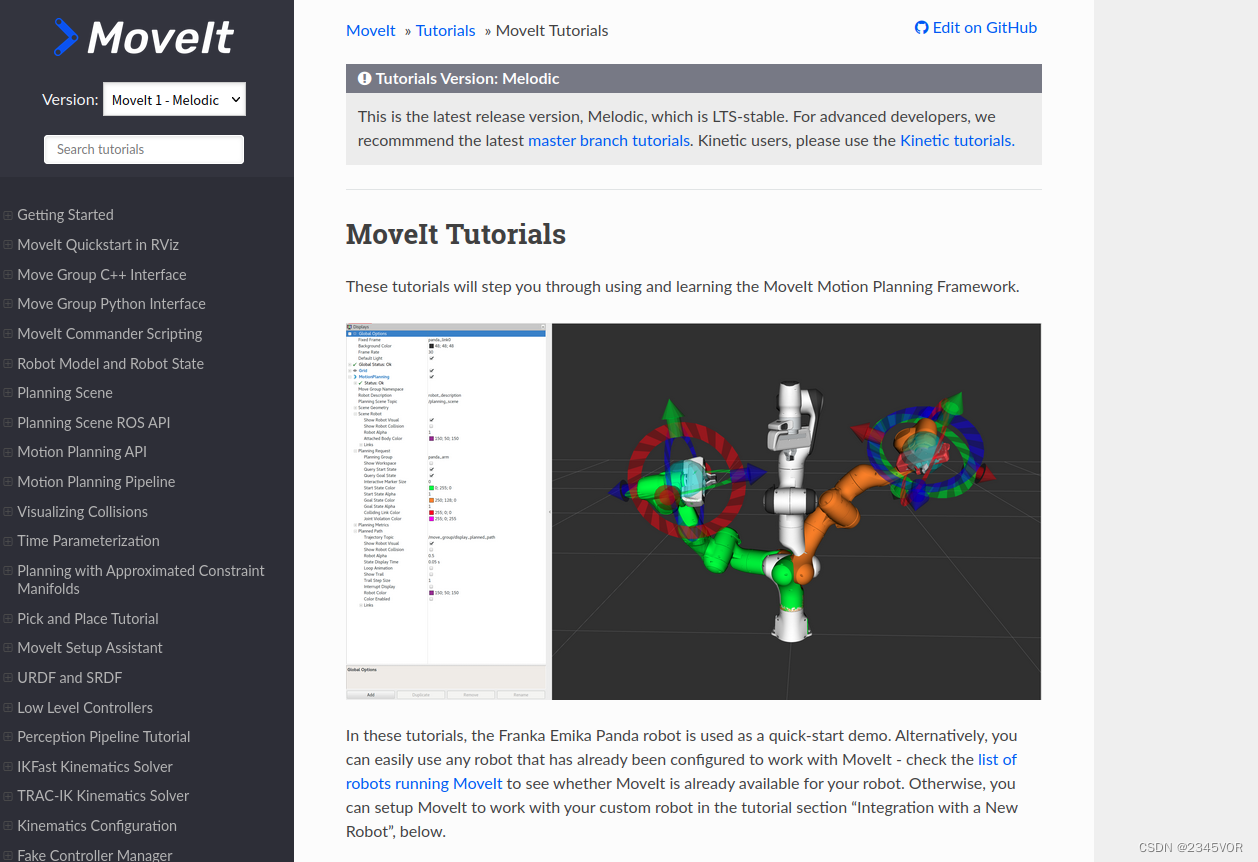
mélodique : http://docs.ros.org/en/melodic/api/moveit_tutorials/html/index.html
2.2 Ensemble de robots ROS
 ros-melodic:git clone https://github.com/ros-industrial/universal_robot.git
ros-melodic:git clone https://github.com/ros-industrial/universal_robot.git
ros-noetic : https://blog.csdn.net/Dawn_yc/article/details/114791755
3. Modélisation robotique URDF
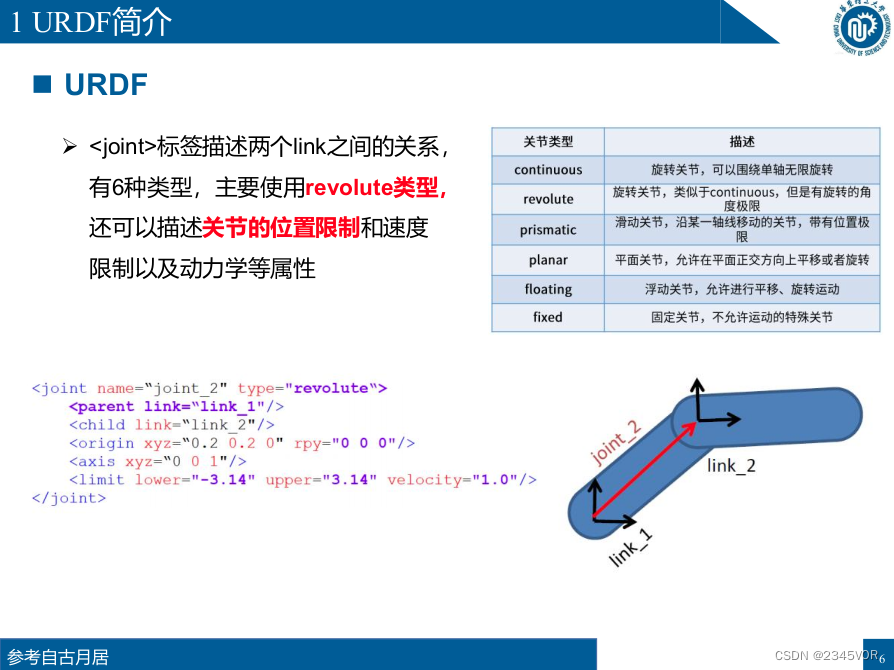
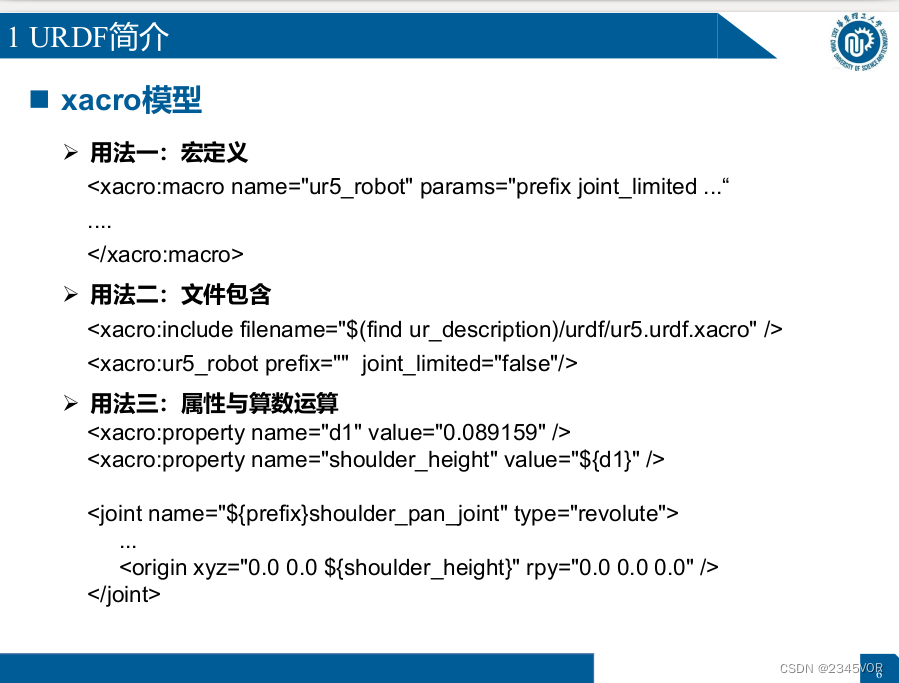
3.1 Introduction à URDF
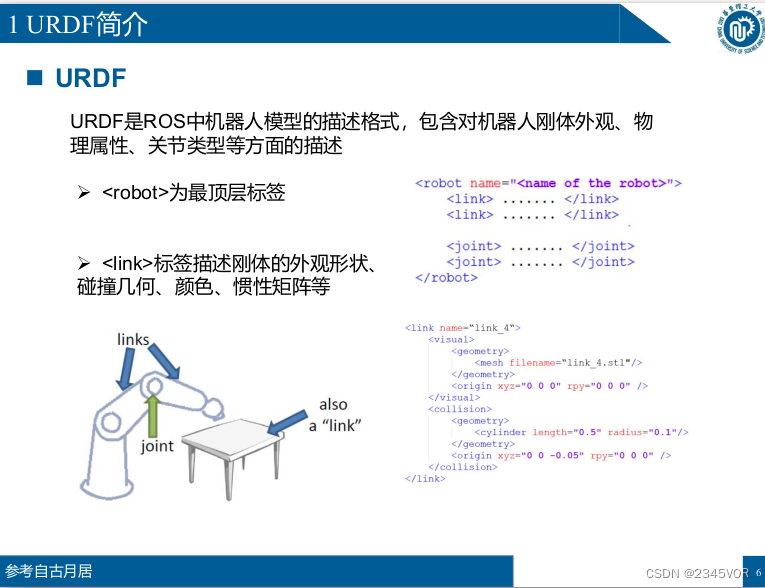
URDF est le format de description du modèle de robot dans ROS, y compris la description de l'apparence du corps rigide du robot, des propriétés physiques, des types d'articulations, etc.
3.2 Voir le modèle
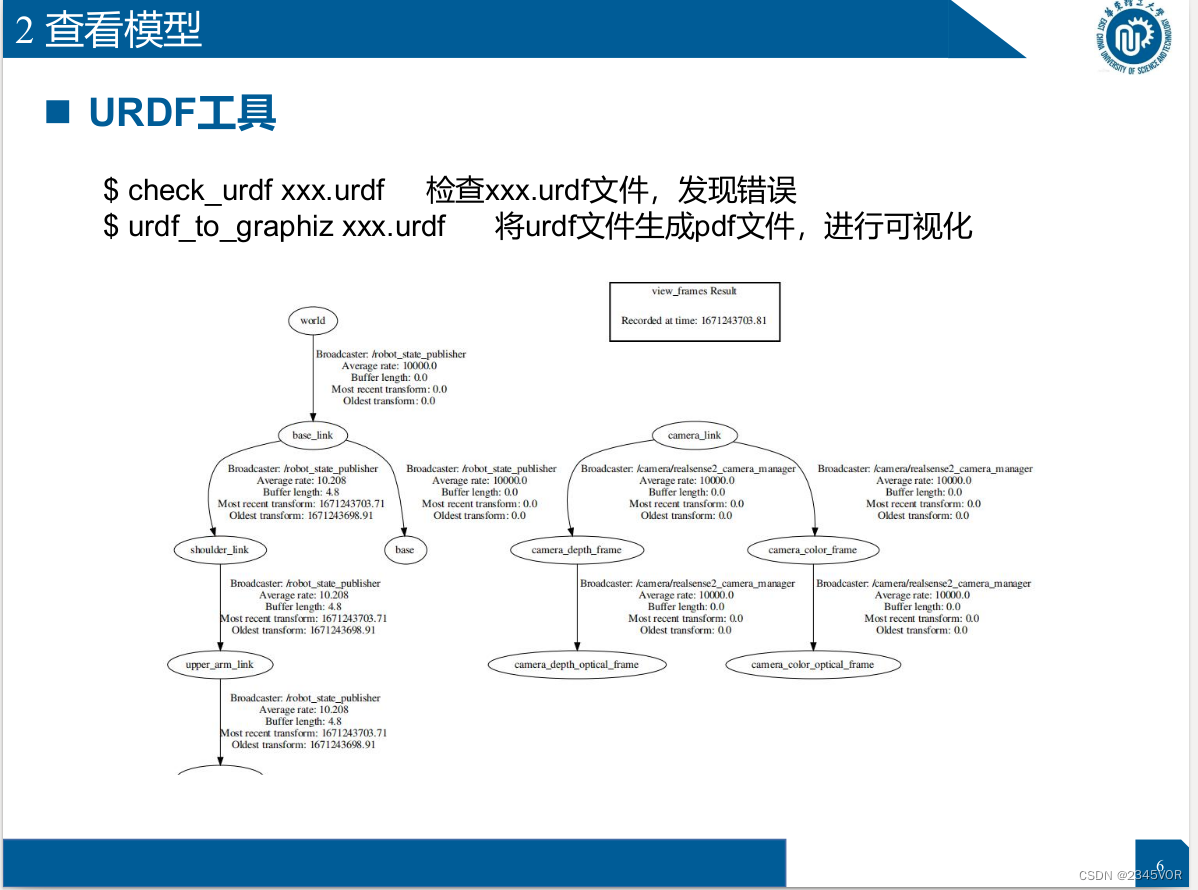
$ check_urdf xxx.urdf Vérifier le fichier xxx.urdf et trouver une erreur
$ urdf_to_graphiz xxx.urdf
Générer un fichier pdf à partir du fichier urdf pour la visualisation
$ roslaunch ur_description view_ur5.launch Afficher le modèle ur5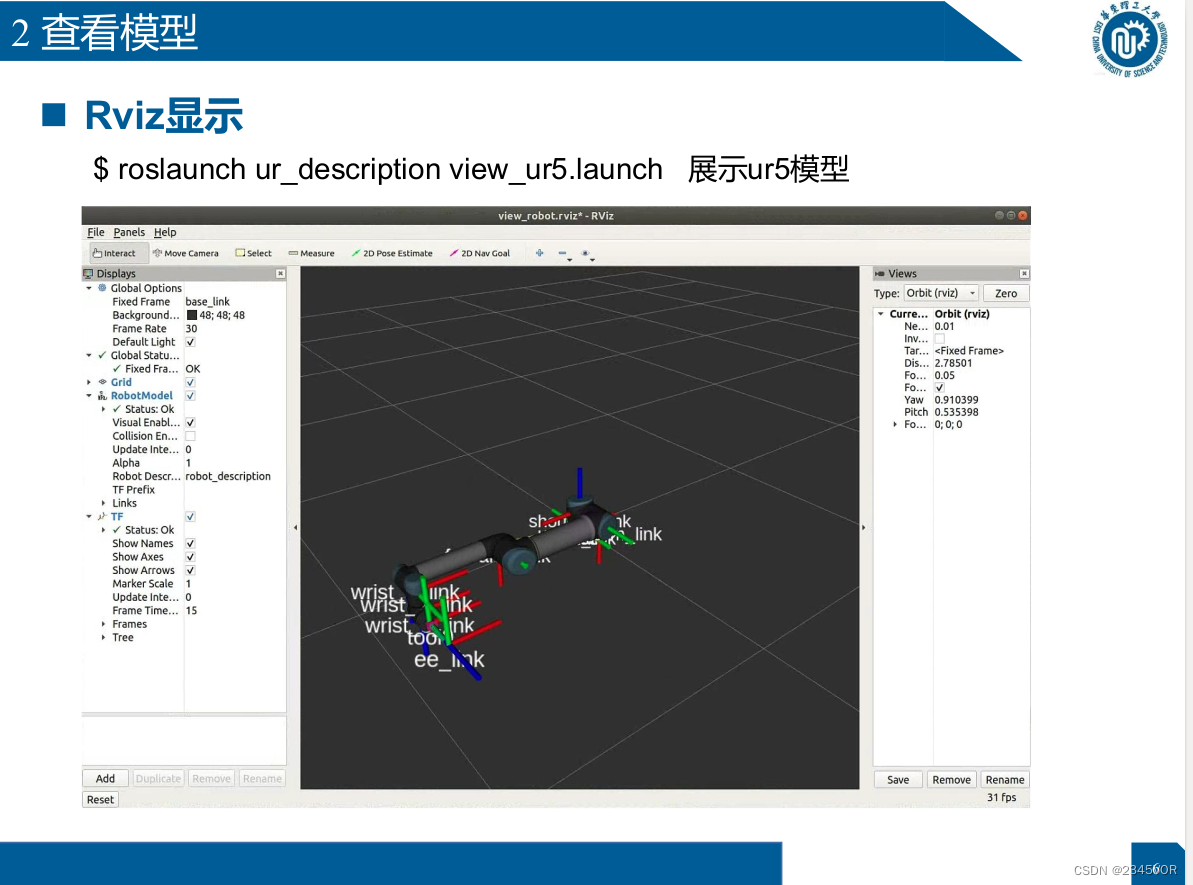
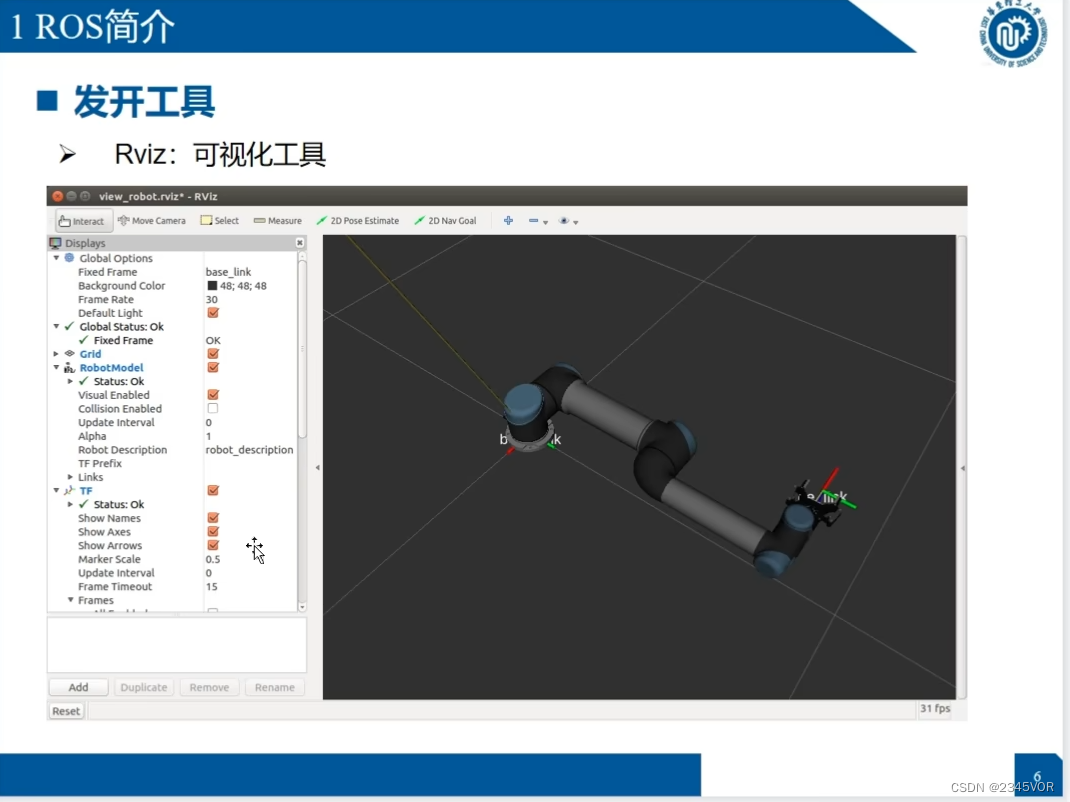
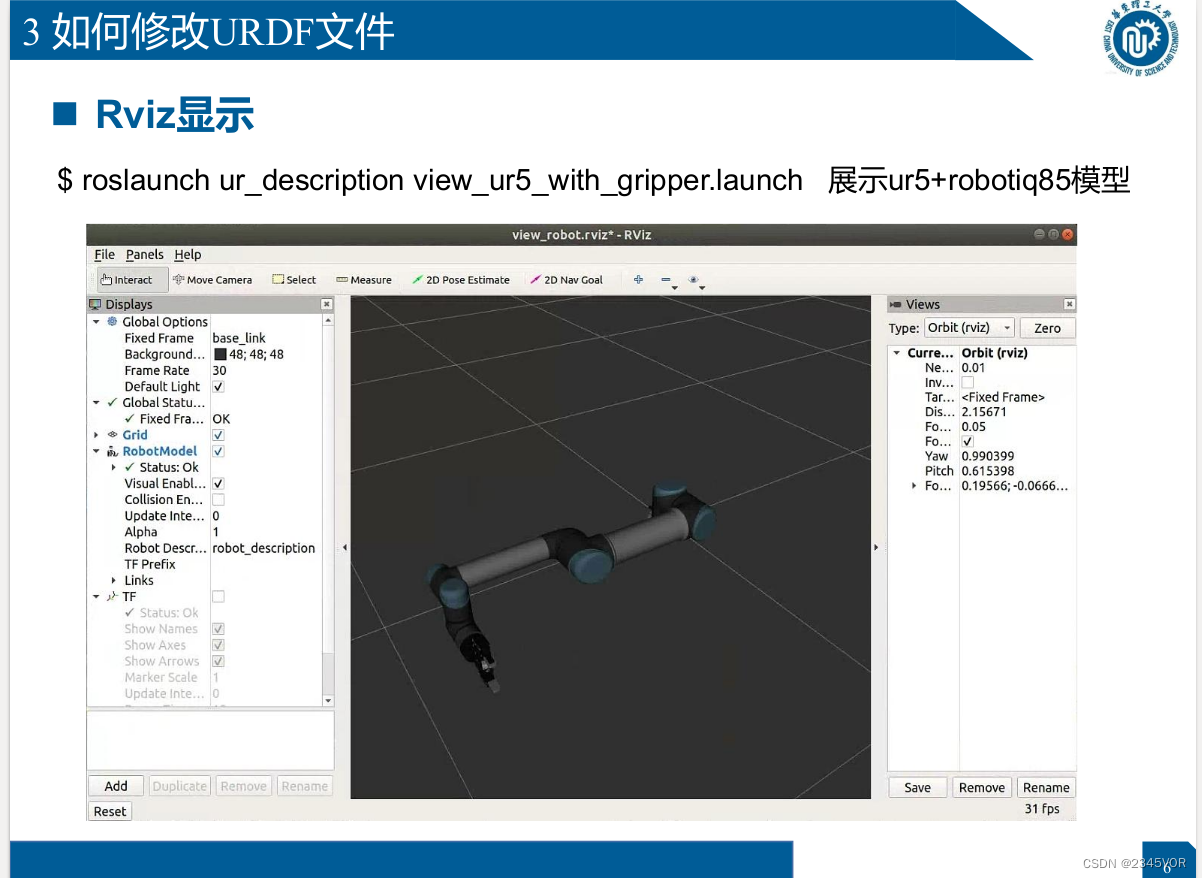
3.3 Configurer et enregistrer Rviz
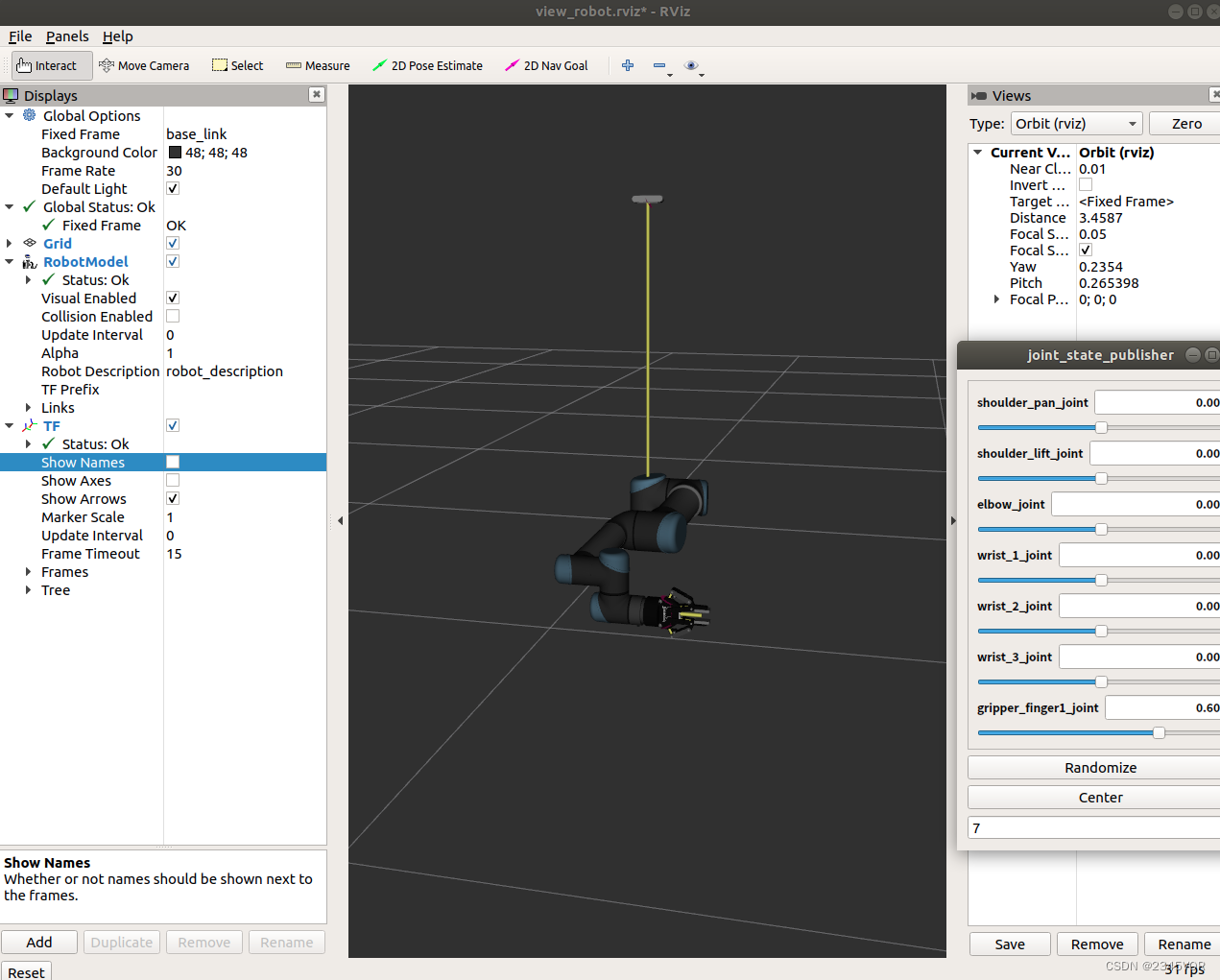
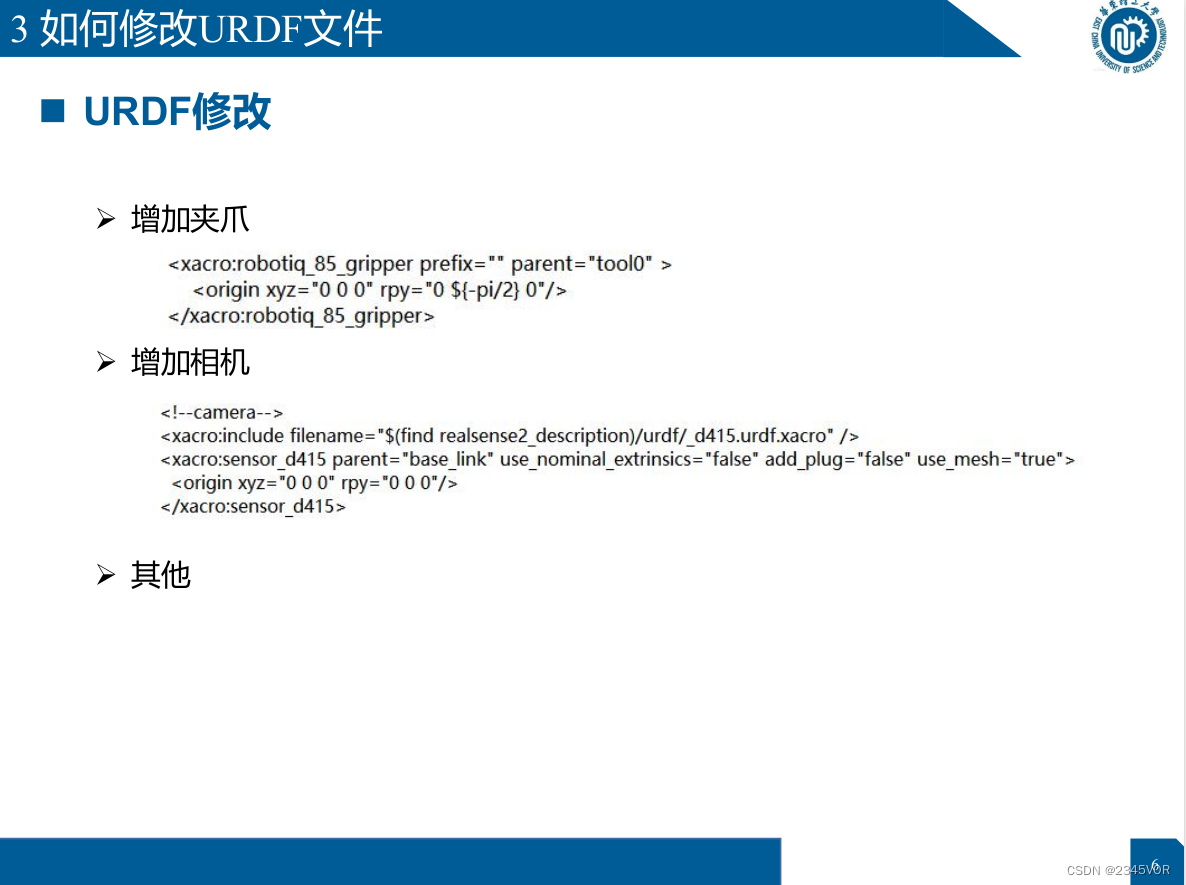 roslaunch ur_description view_ur5_with_gripper.launch Exposition modèle ur5+robotiq85
roslaunch ur_description view_ur5_with_gripper.launch Exposition modèle ur5+robotiq85
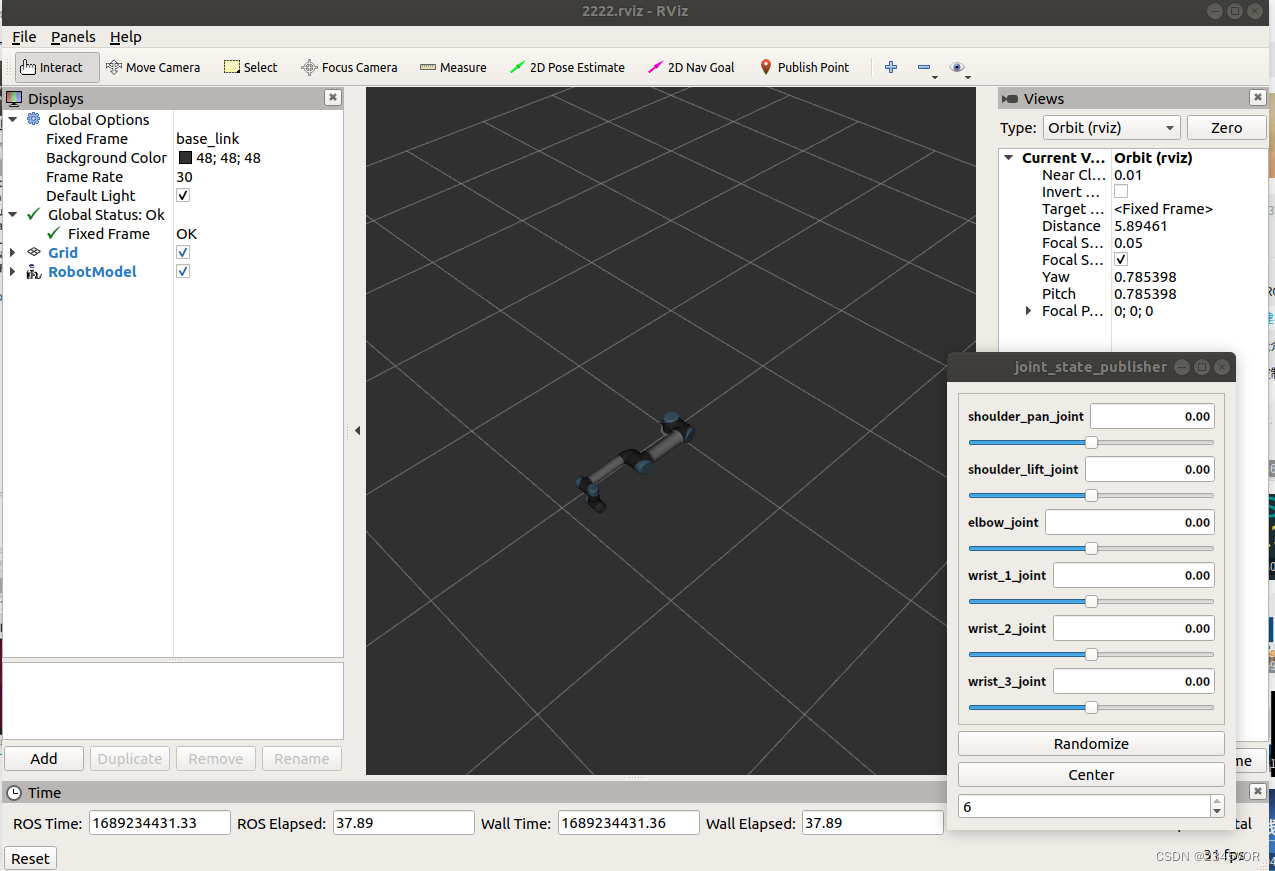
roslaunch ur_description view_ur5.launch
rviz
Le chemin de sauvegarde rviz est dansuniversal_robot/ur_description/cfg/2222.rviz
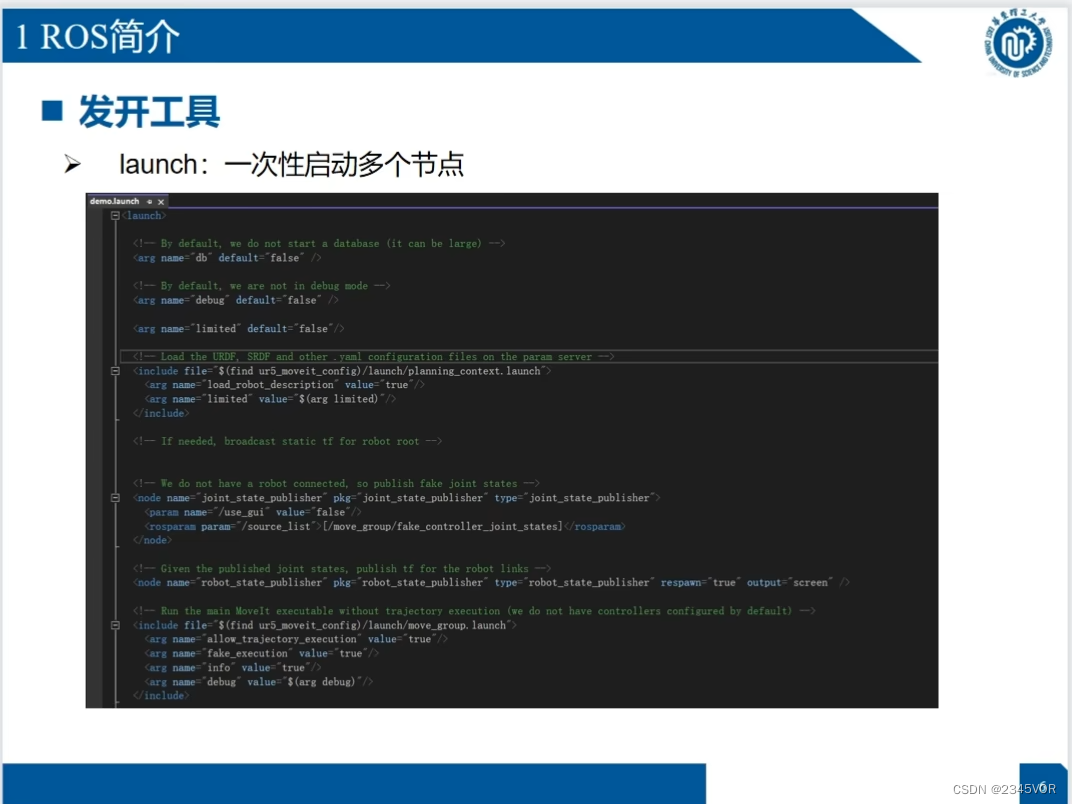
<?xml version="1.0"?>
<launch>
<include file="$(find ur_description)/launch/ur5_upload.launch"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" >
<param name="use_gui" value="true"/>
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find ur_description)/cfg/2222.rviz" required="true" />
</launch>
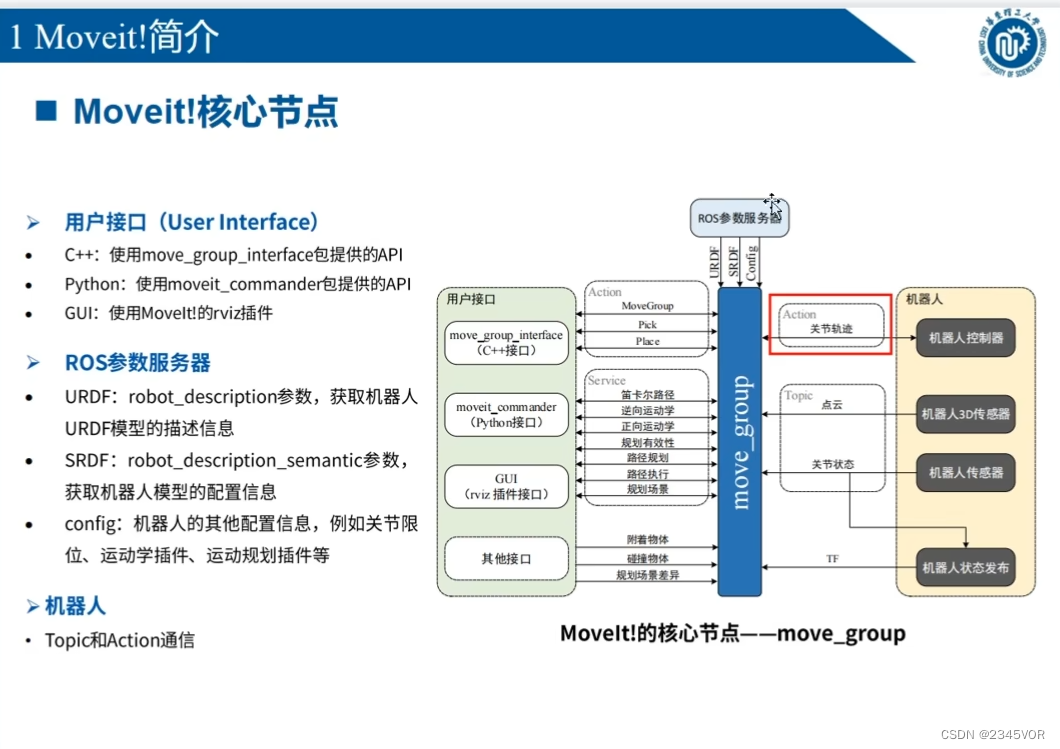
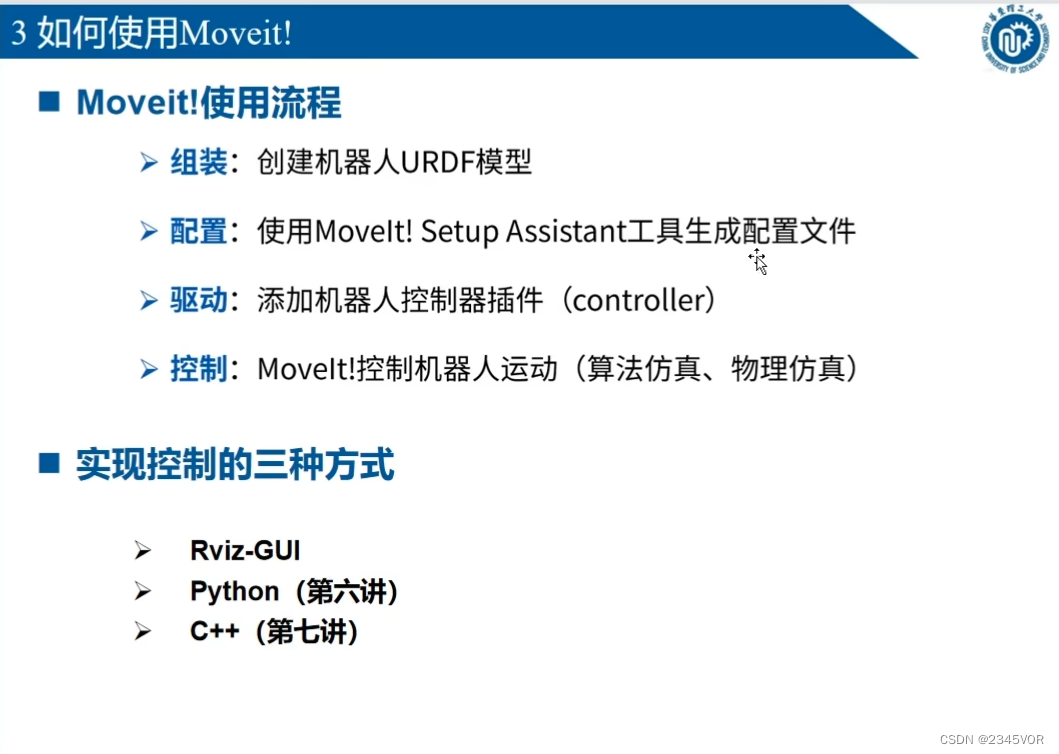
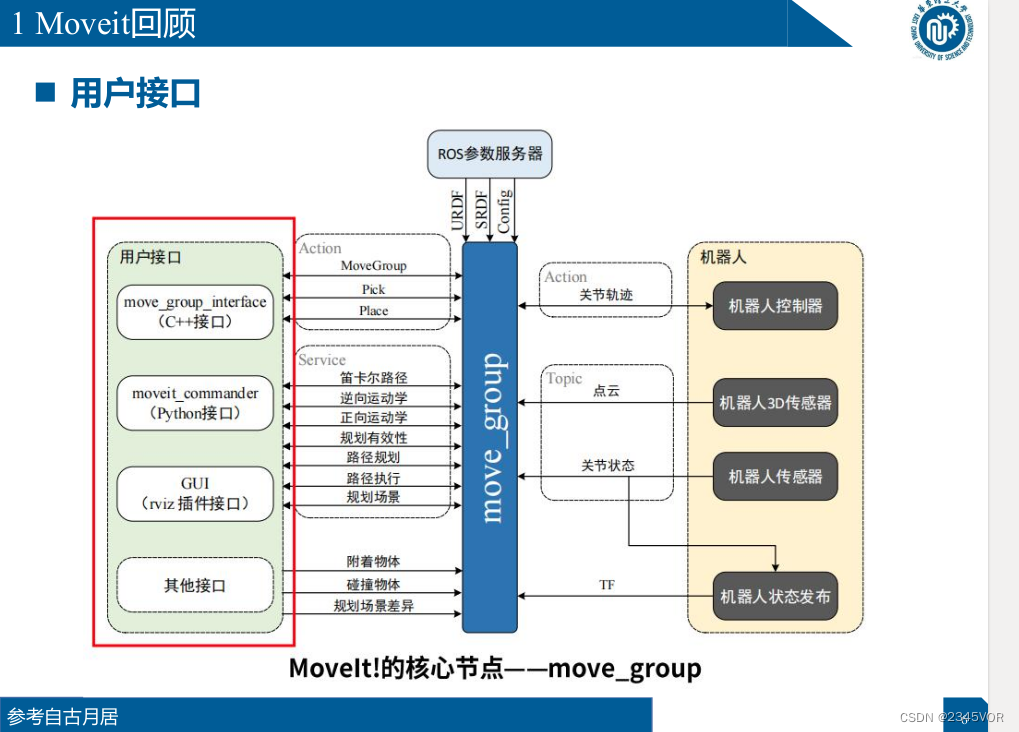
4. Présentation des fonctions principales de Moveit! et contrôle Rviz
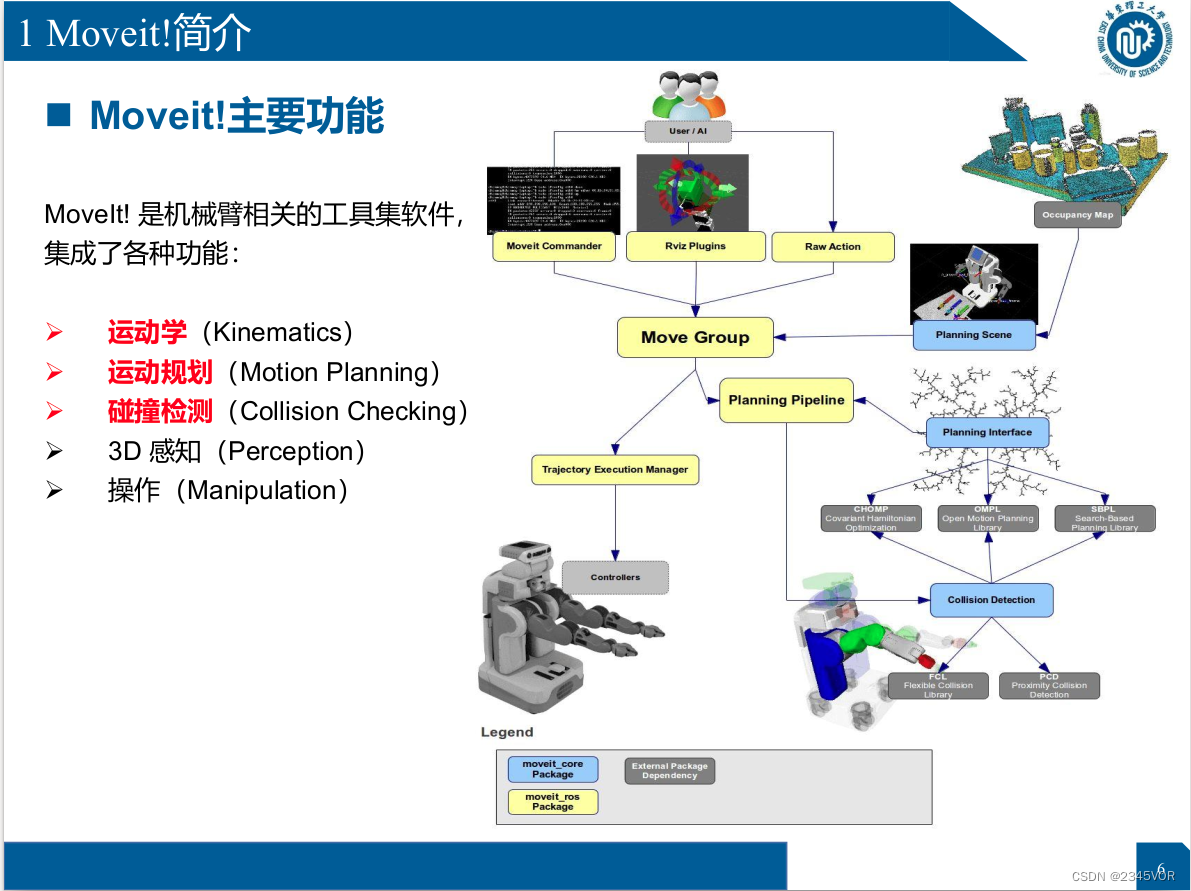
4.1 Présentation de Moveit!
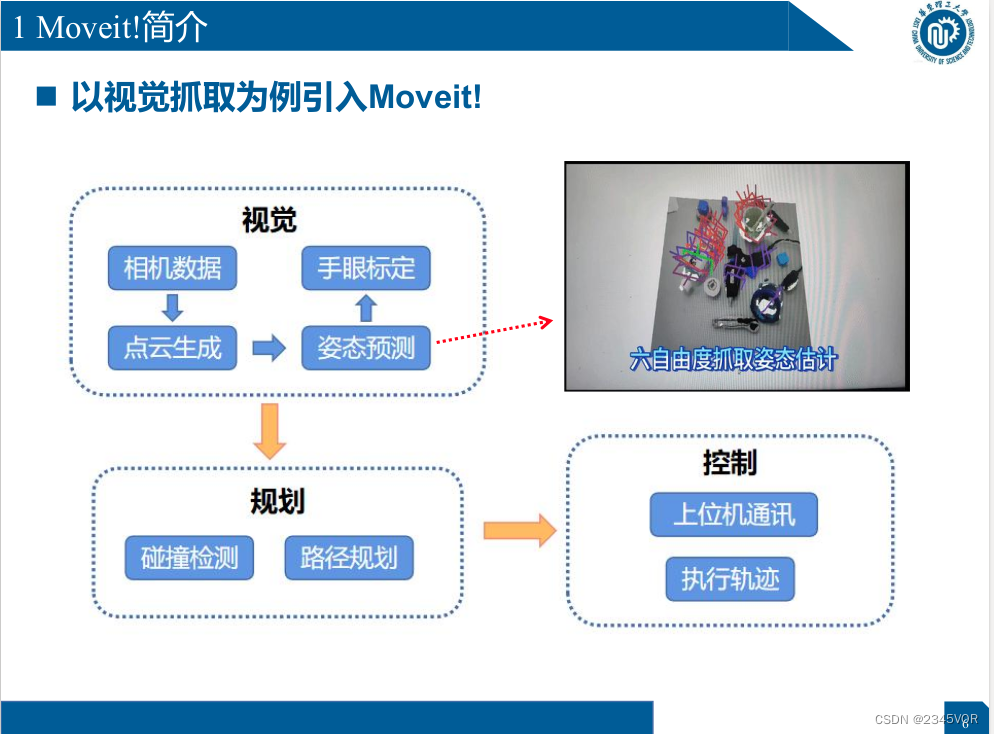 MoveIt! est un ensemble d'outils logiciels liés au bras robotique, qui
MoveIt! est un ensemble d'outils logiciels liés au bras robotique, qui
intègre diverses fonctions :
Ø Cinématique
Ø Planification du mouvement
Ø Vérification des collisions
Ø Perception 3D
Ø Manipulation
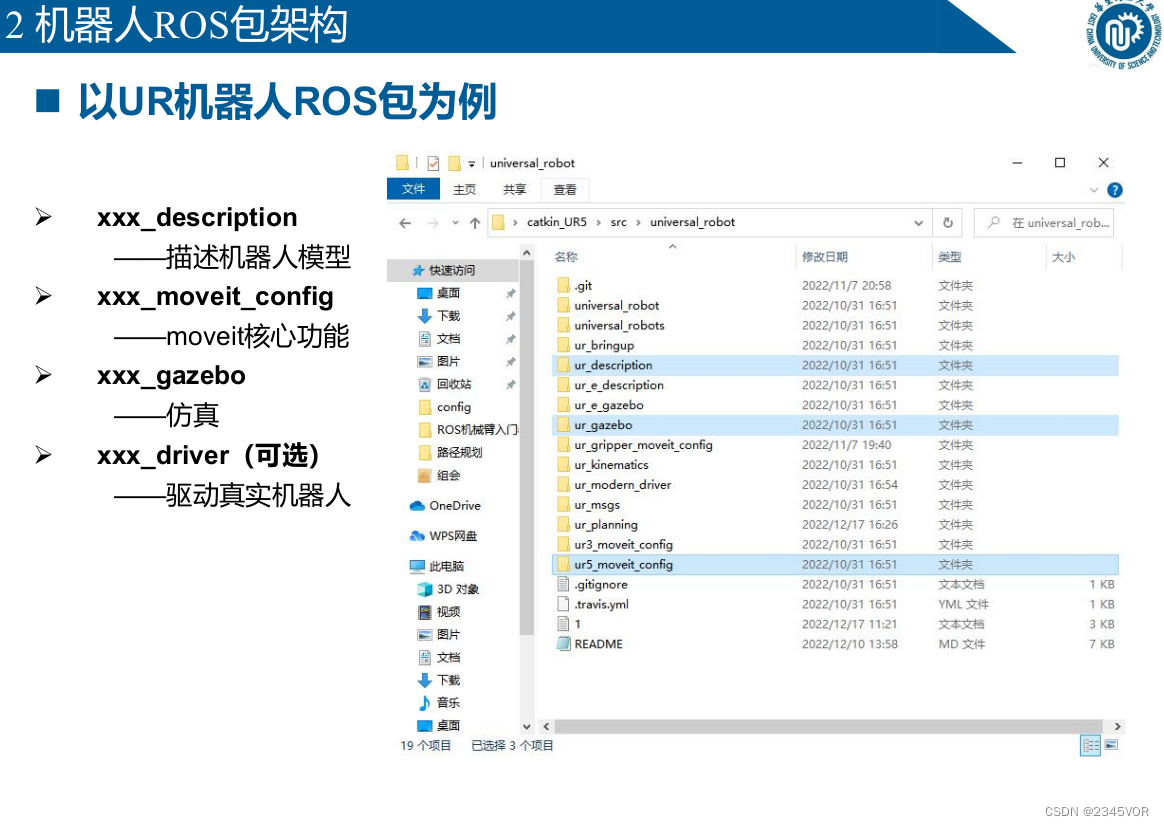
4.2 Architecture du package Robot ROS
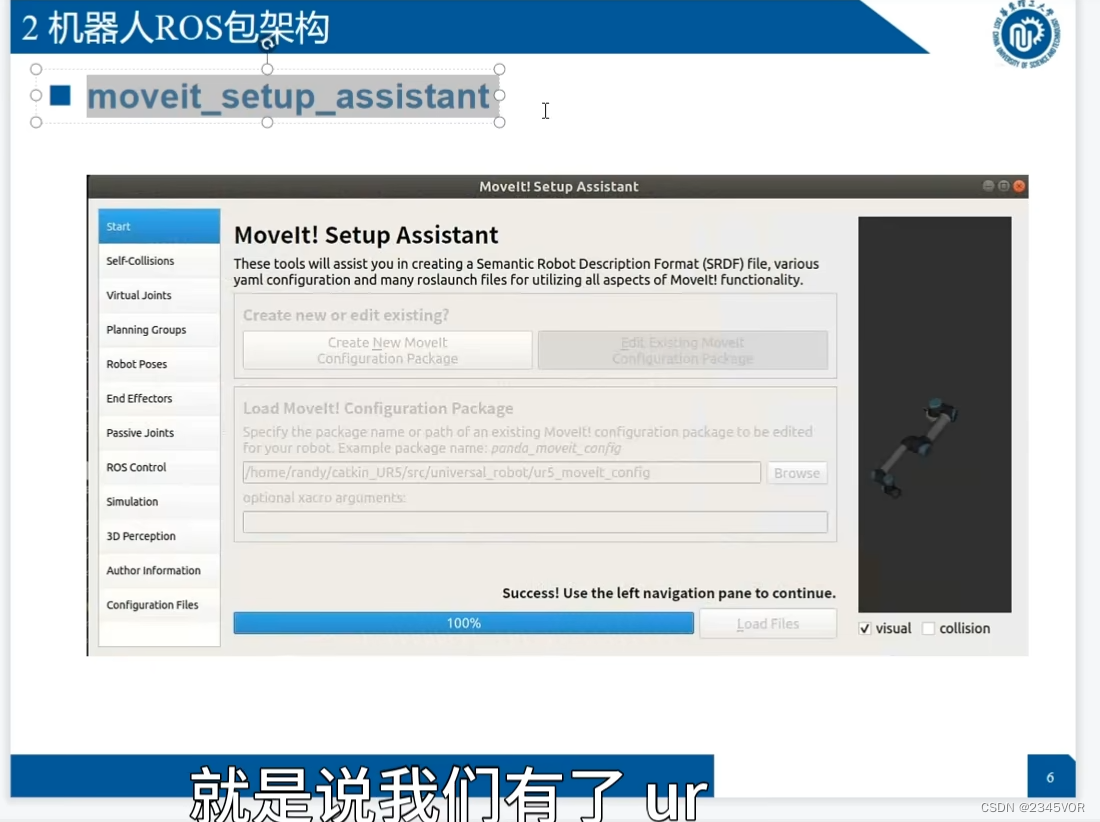
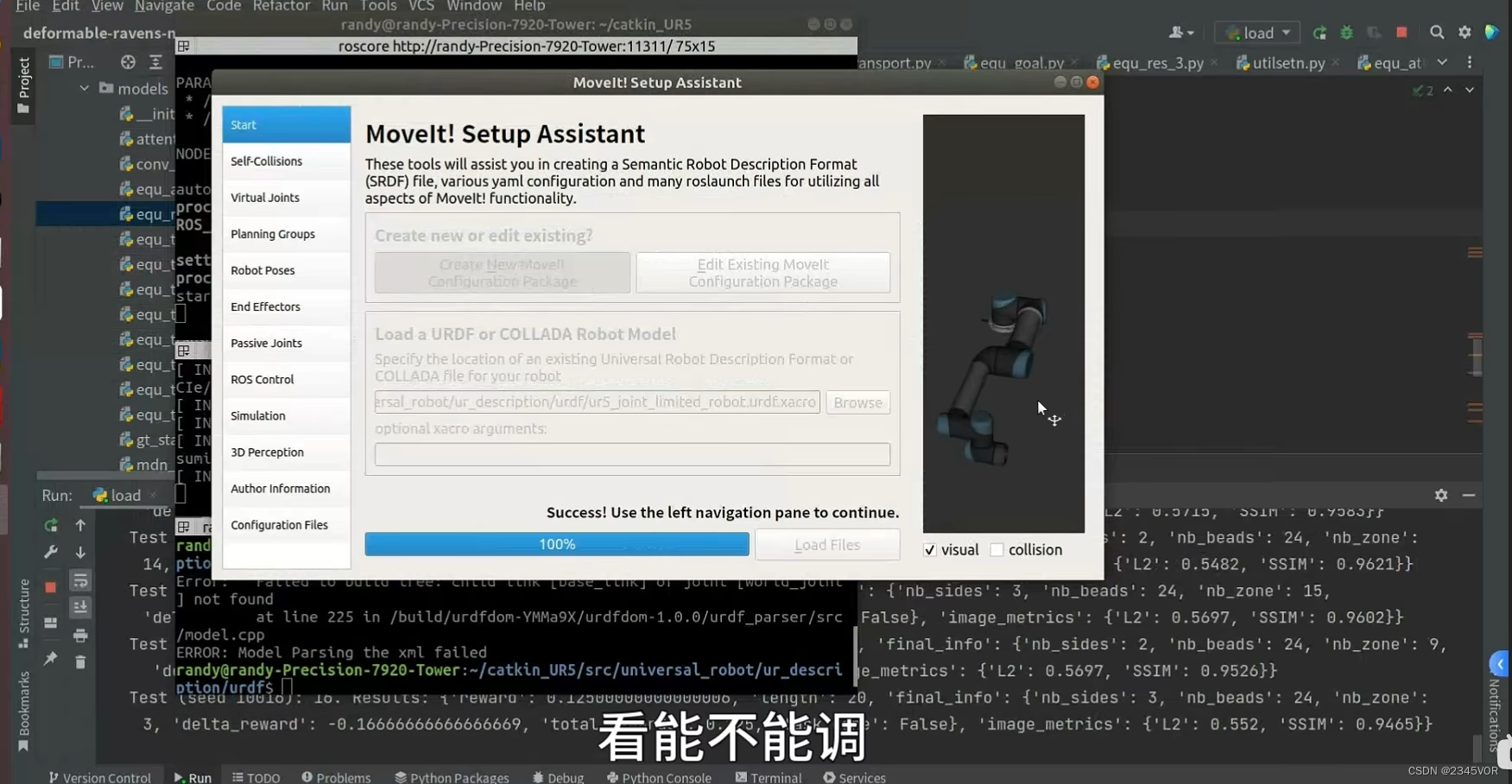
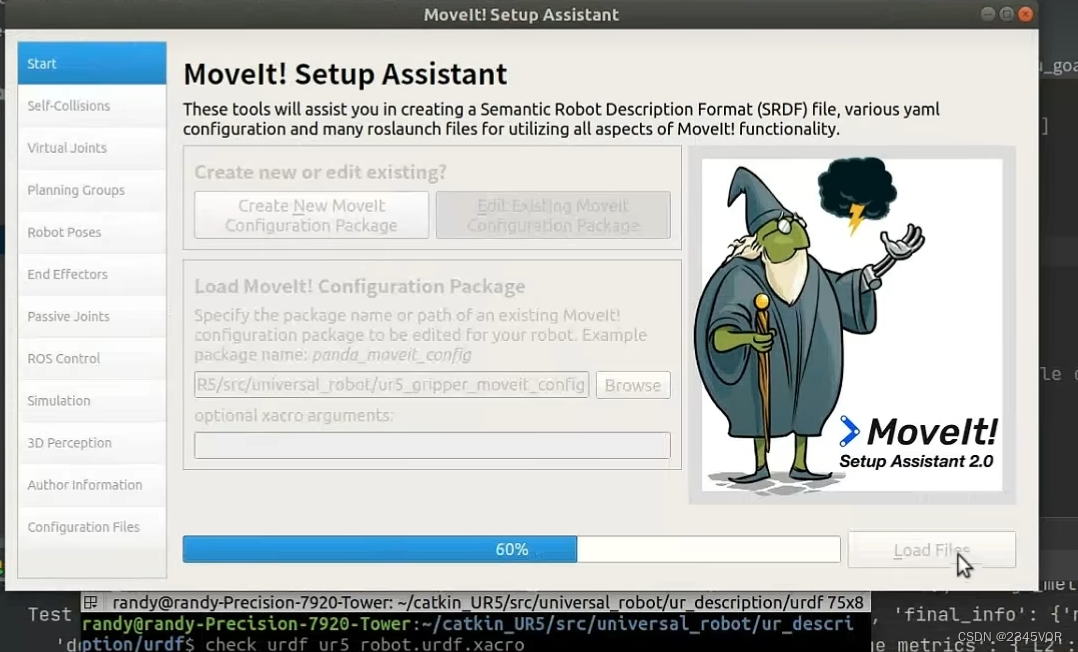
rosrun moveit_setup_assistant moveit_setup_assistant
Charger le modèle urdf
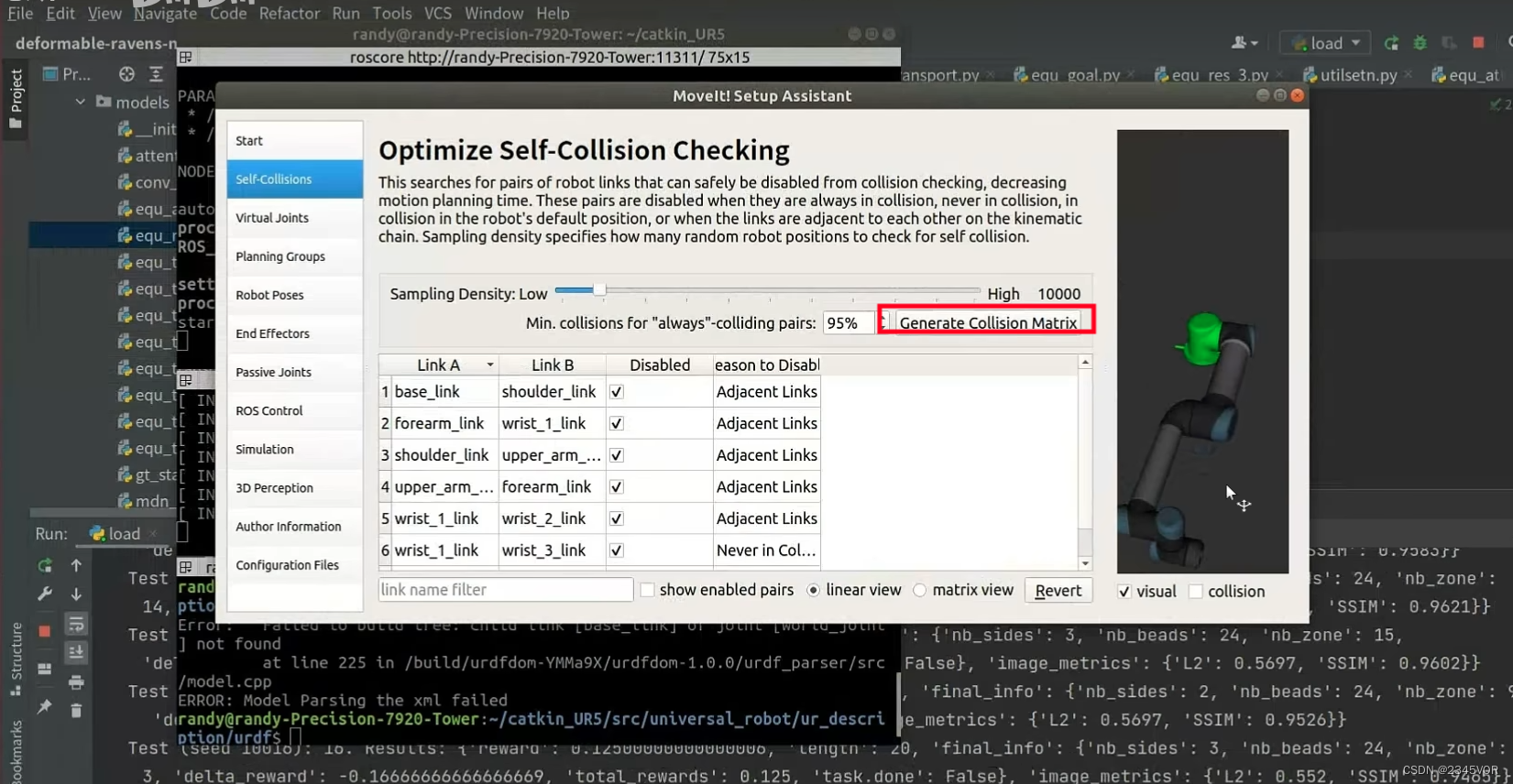
 pour vérifier s'il y a une collision entre les joints
pour vérifier s'il y a une collision entre les joints
Sélectionnez le solveur,
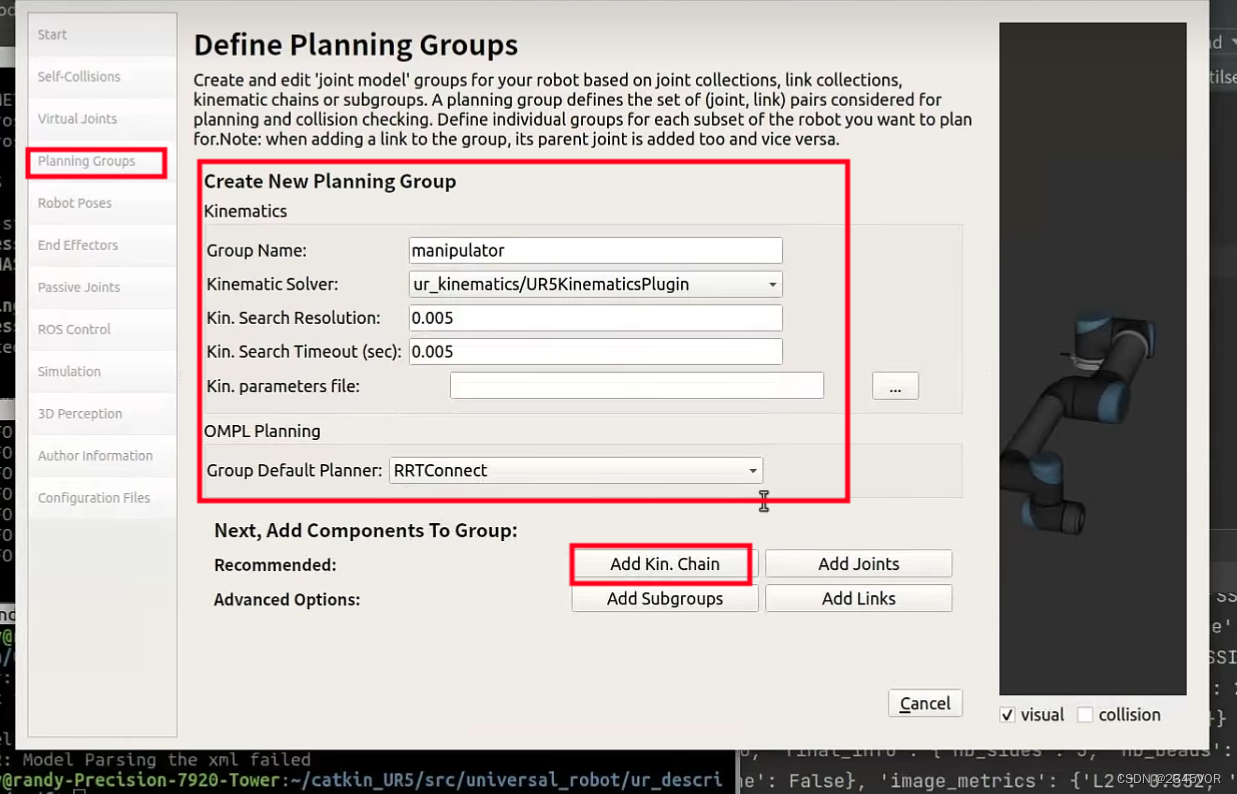
sélectionnez la connexion de référence et le solveur de fin,
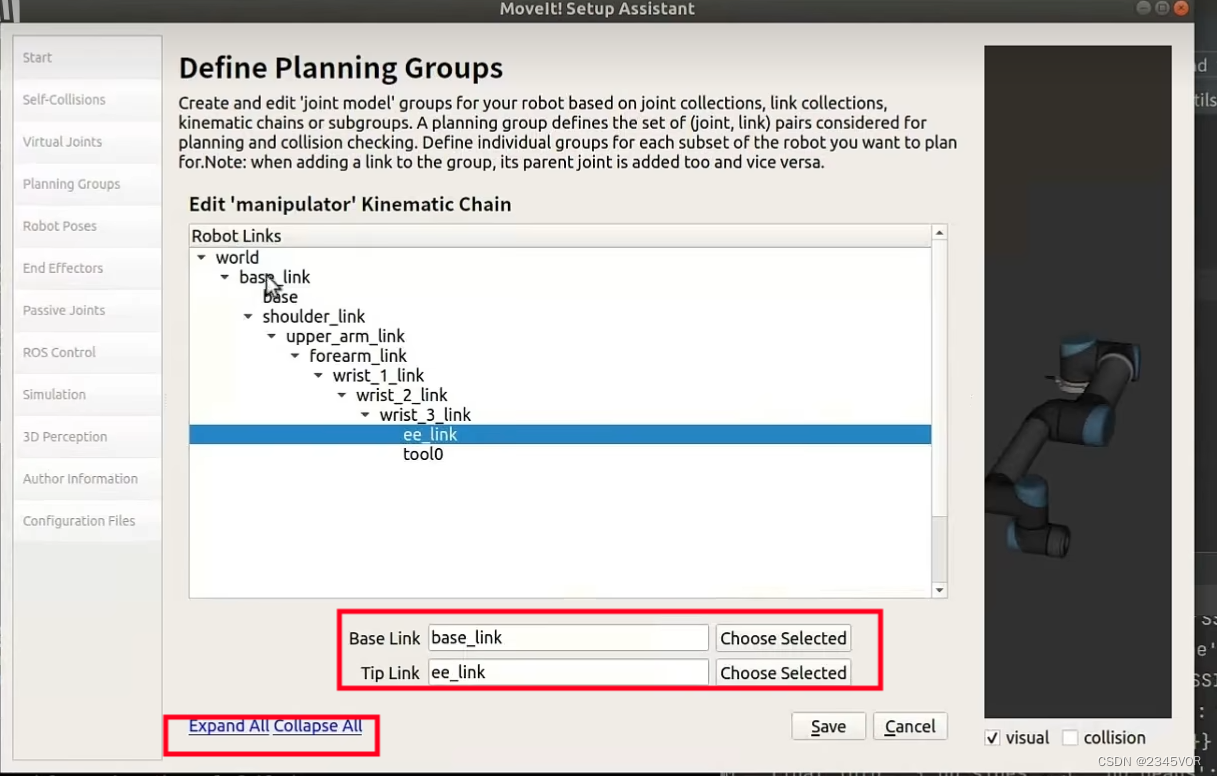
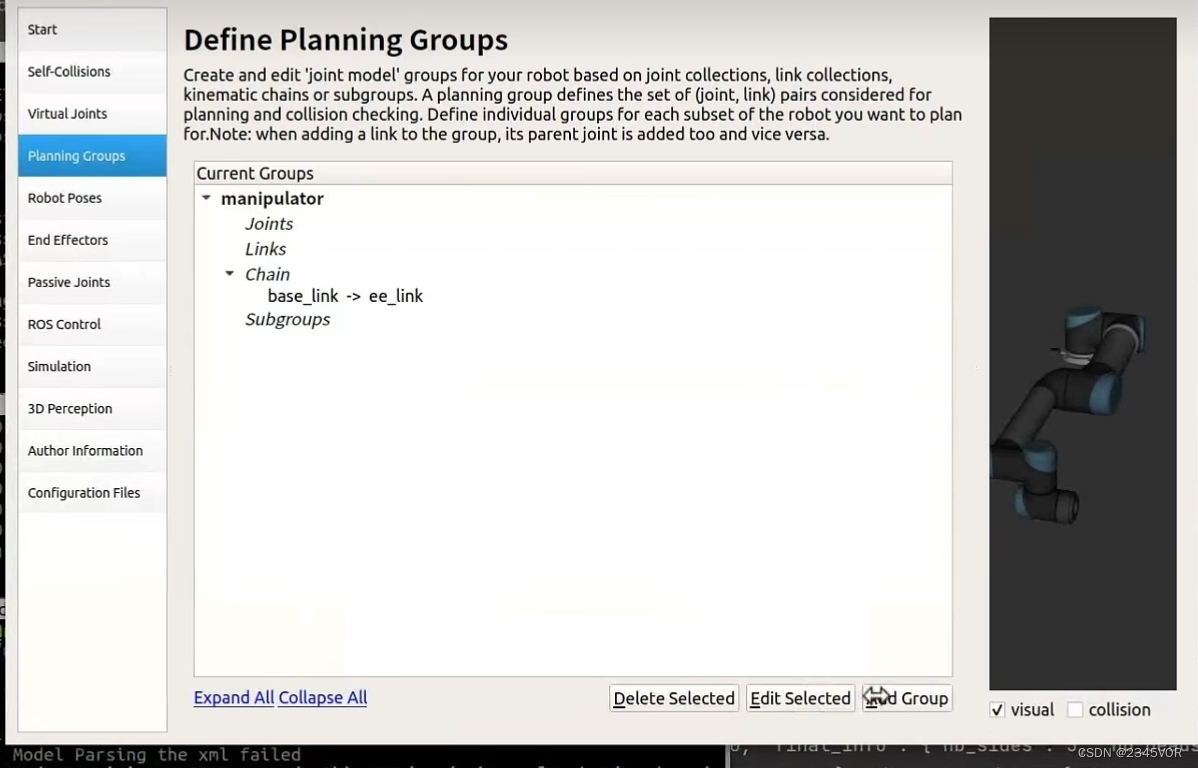
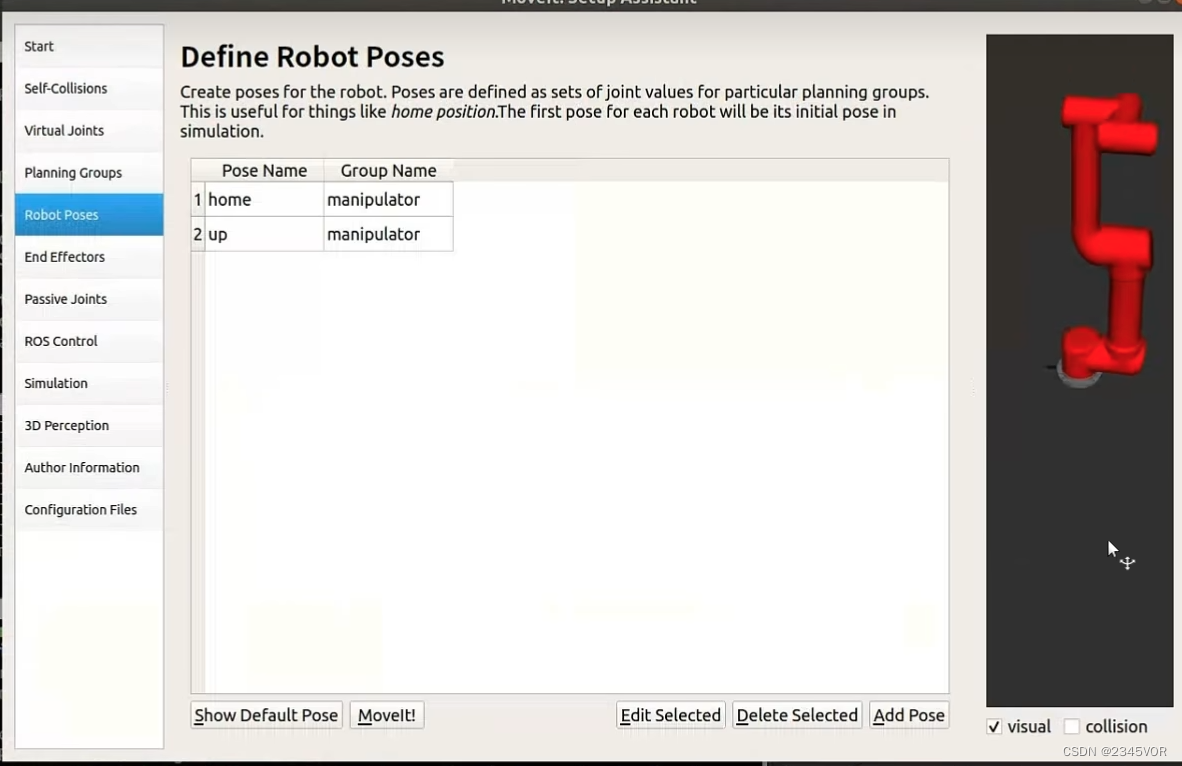
configurez la position de posture appropriée,
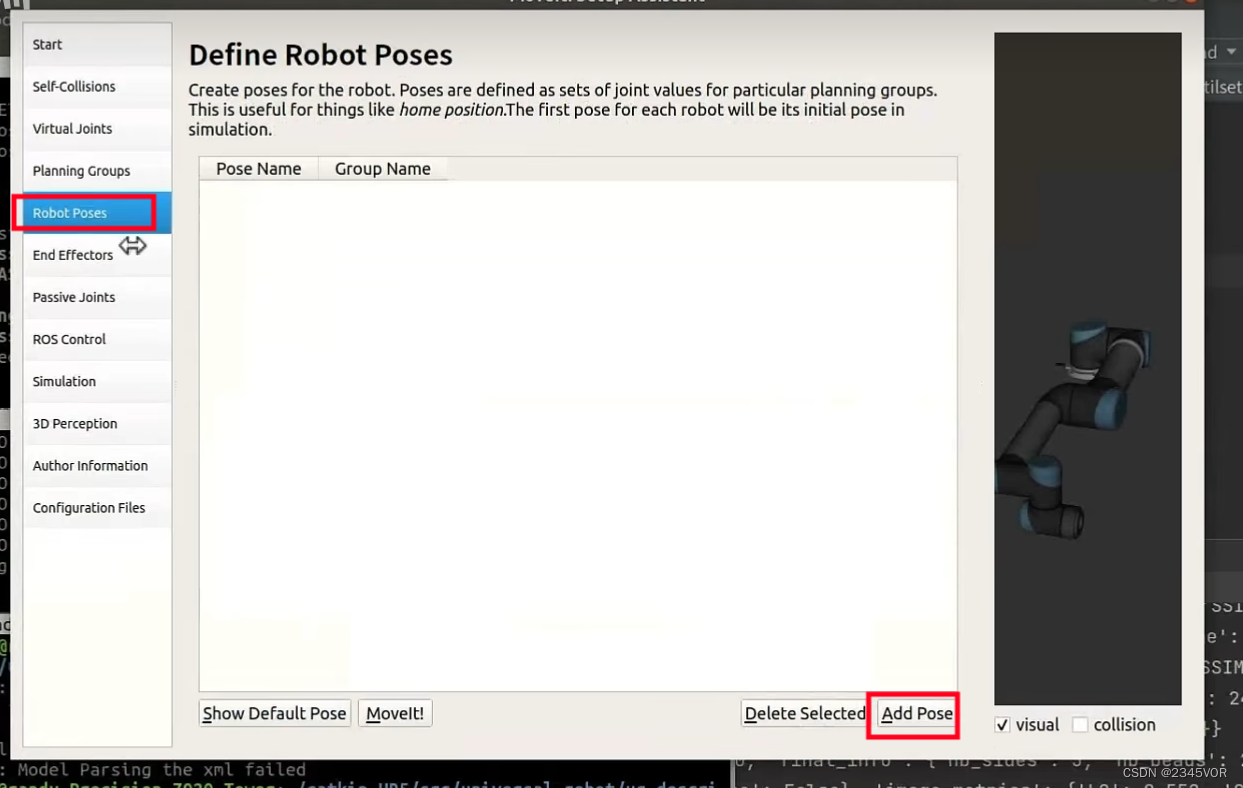
couchez-vous à plat et toutes

les postures à zéro 0,-1.5708,0-1.5708,0,0
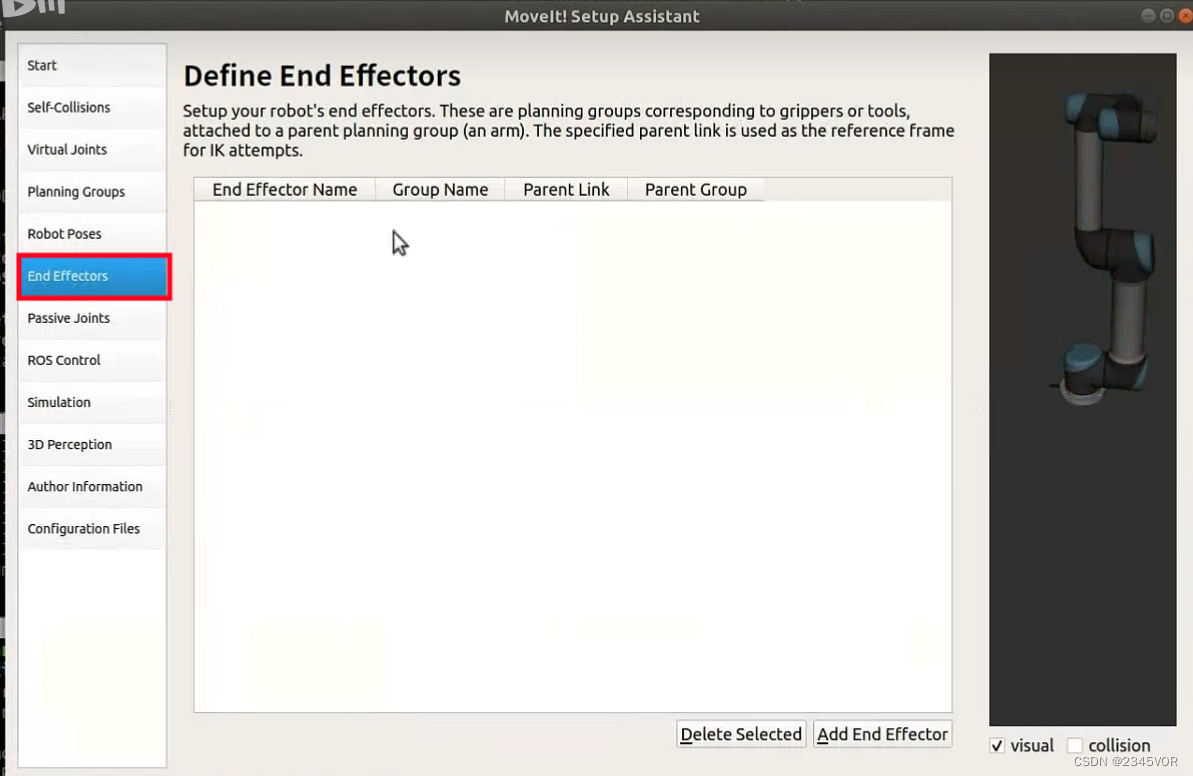
 Configurer la pince d'extrémité
Configurer la pince d'extrémité
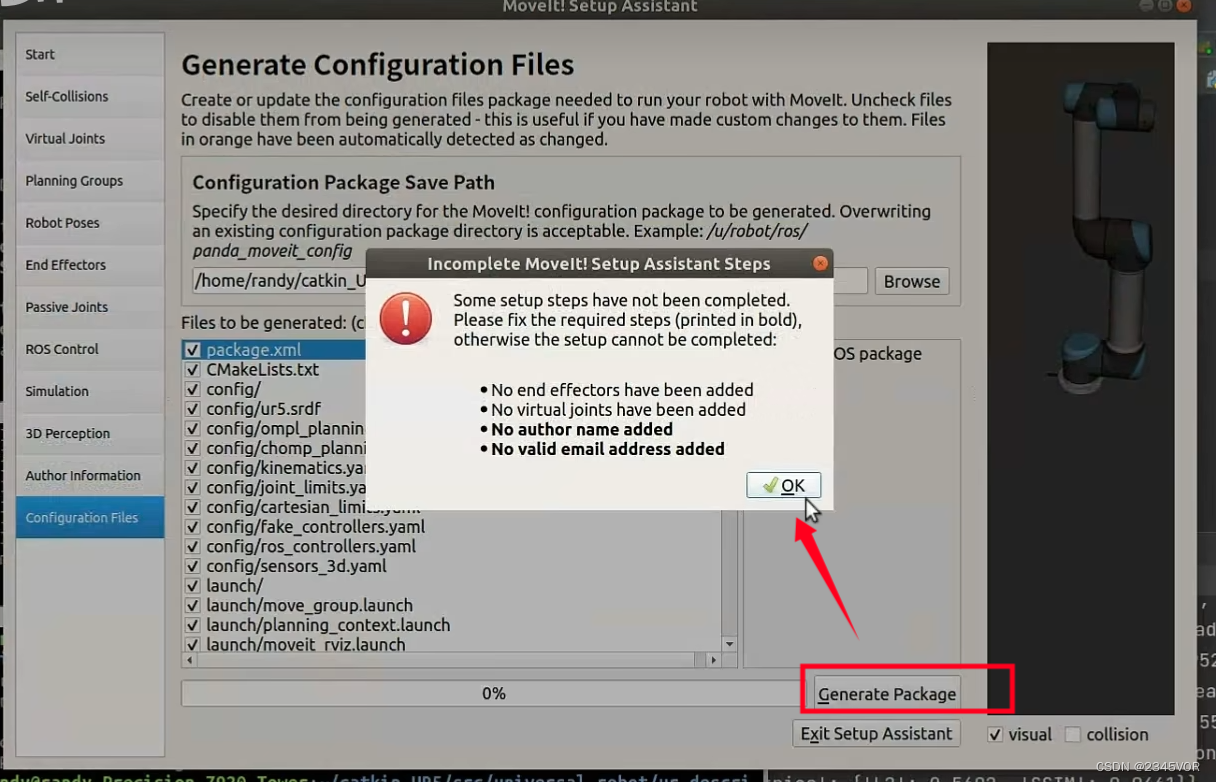
Remplissez les informations personnelles
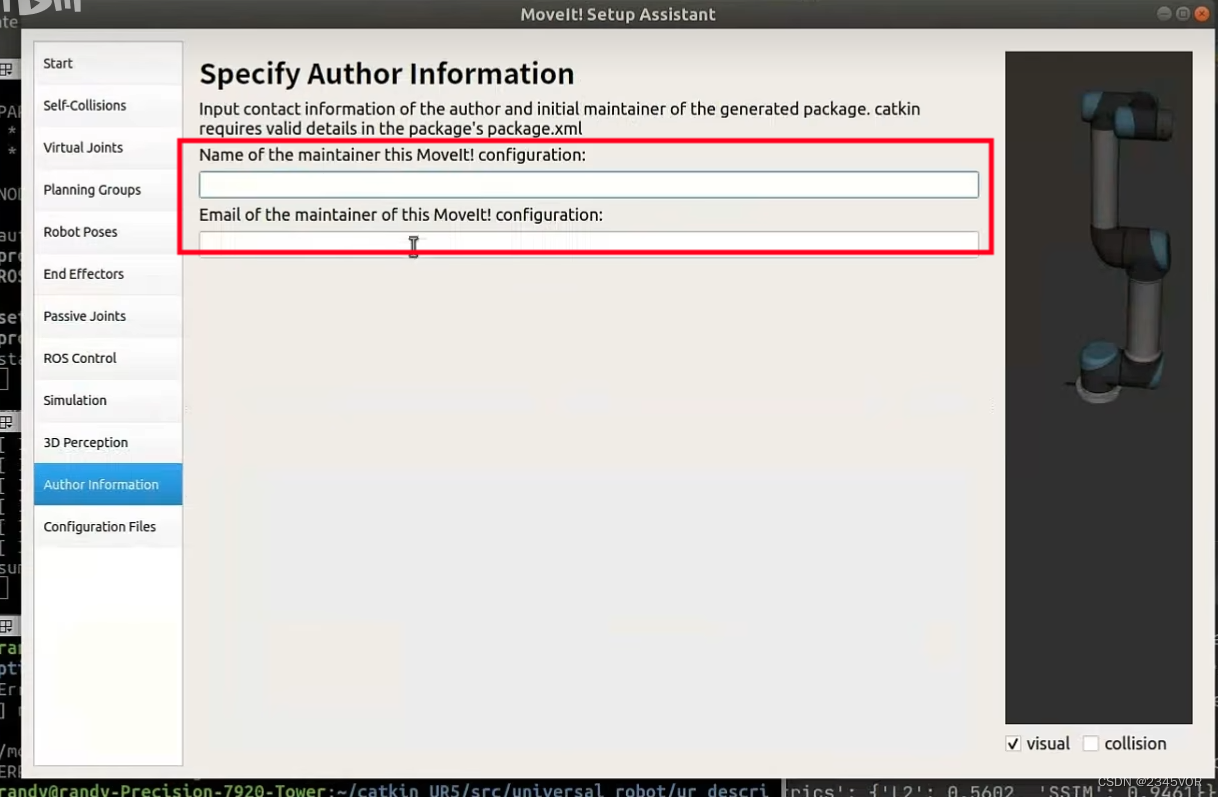 et créez enfin le modèle
et créez enfin le modèle
Importer directement le modèle
4.3 Paramètres de l'ordinateur
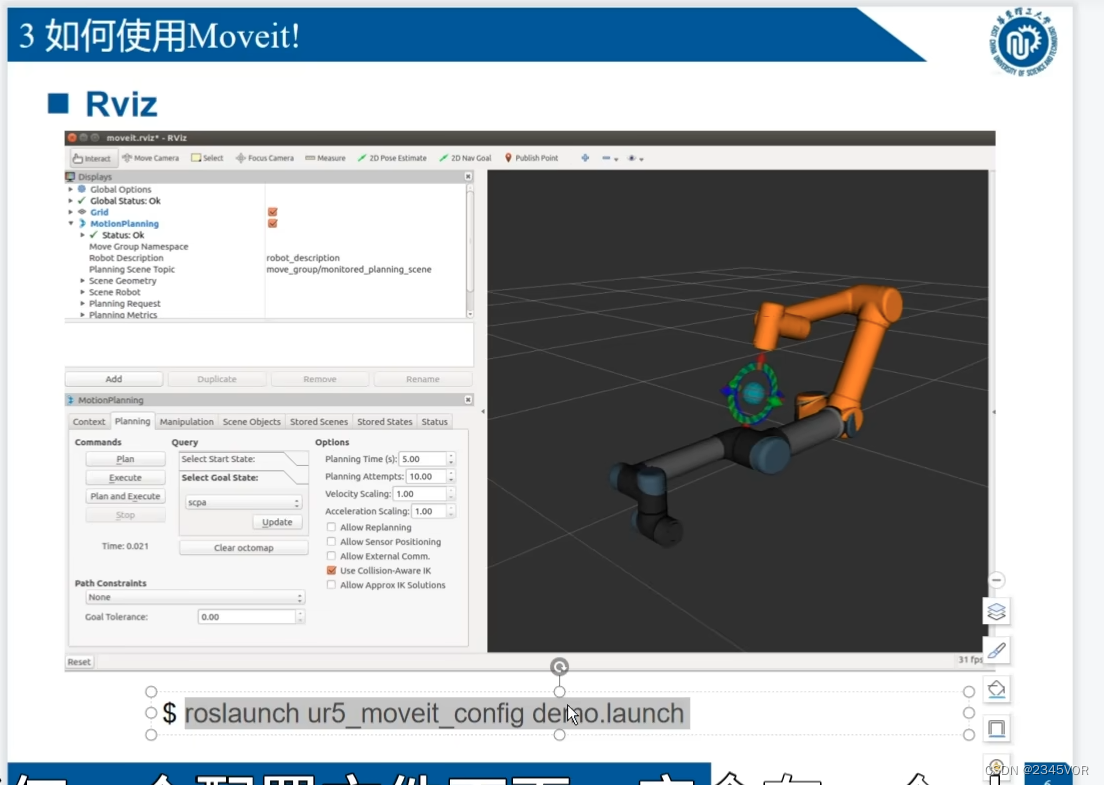
 Il y a une démo Rviz correspondante après la configuration de moveit
Il y a une démo Rviz correspondante après la configuration de moveit
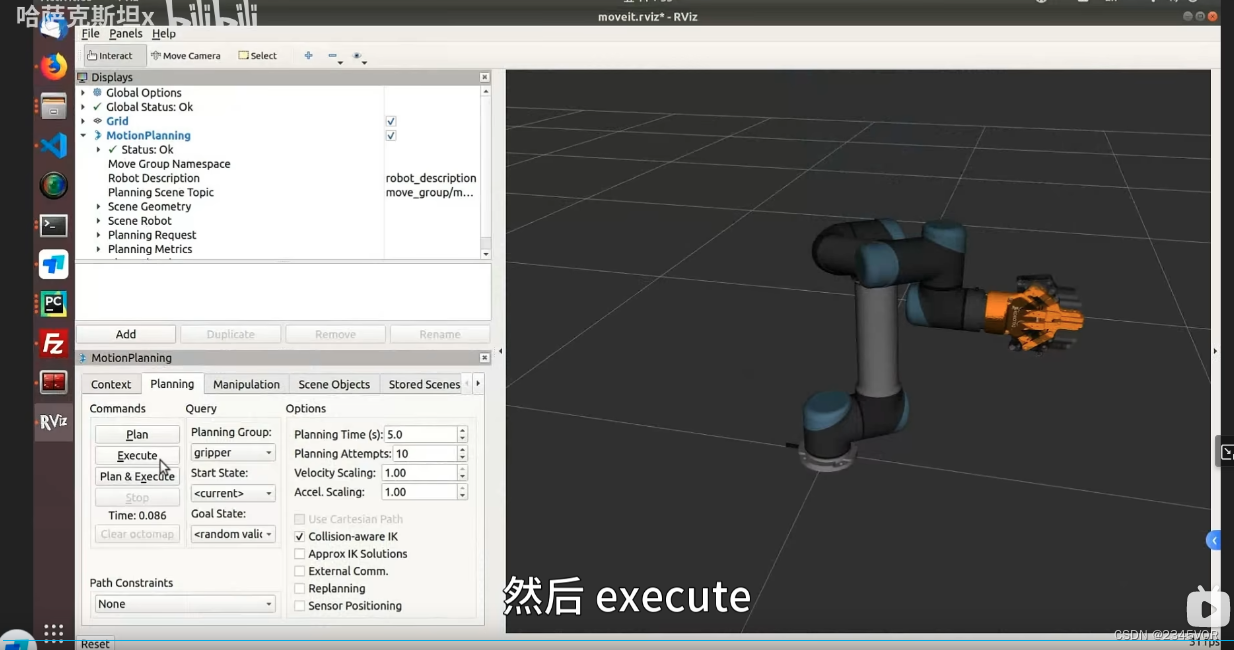
roslaunch ur5_moveit_config demo.launch

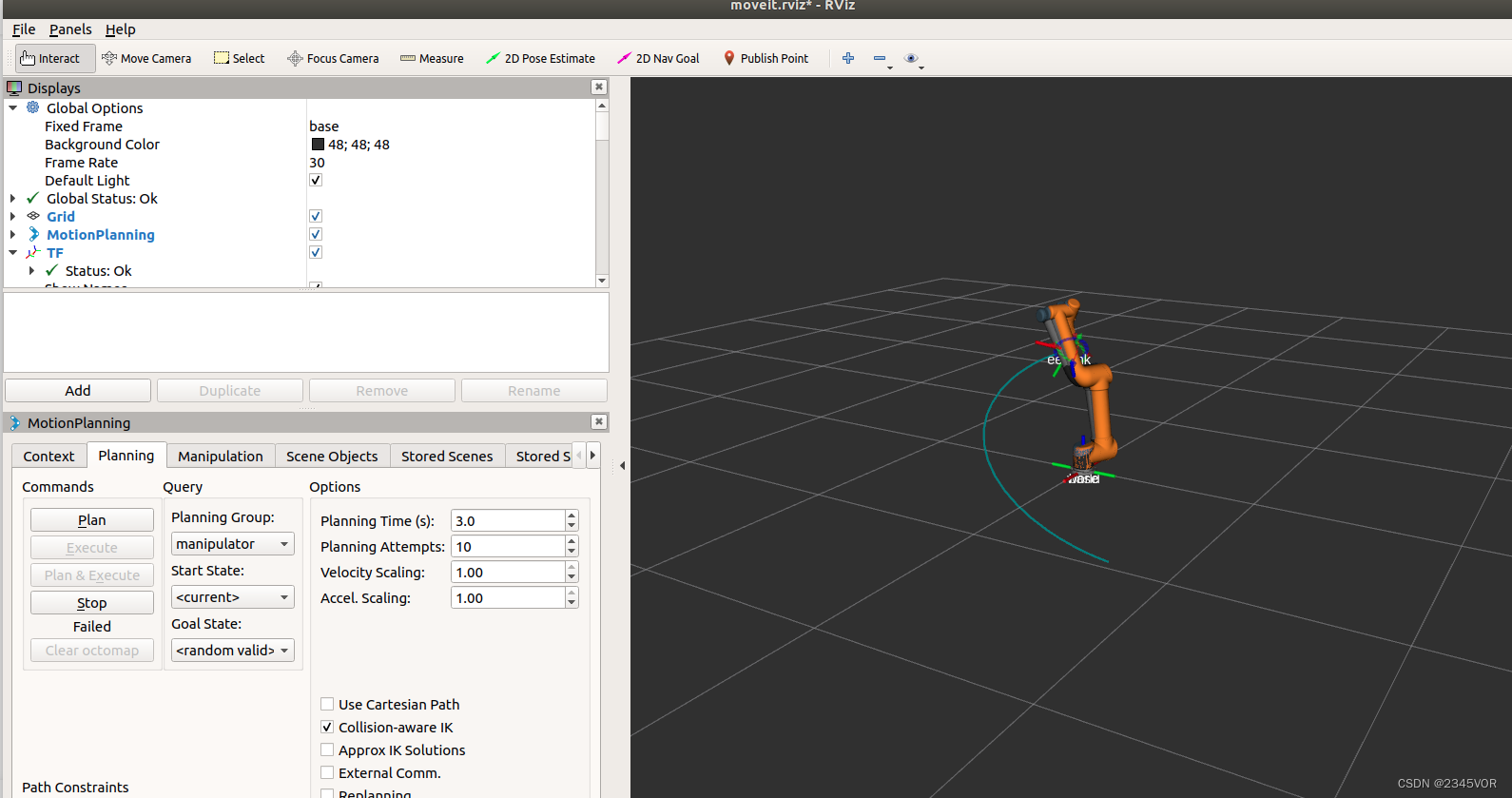
 Position cible aléatoire, cliquez sur planifier et exécuter, vous pouvez passer à la position correspondante
Position cible aléatoire, cliquez sur planifier et exécuter, vous pouvez passer à la position correspondante
Ajouter
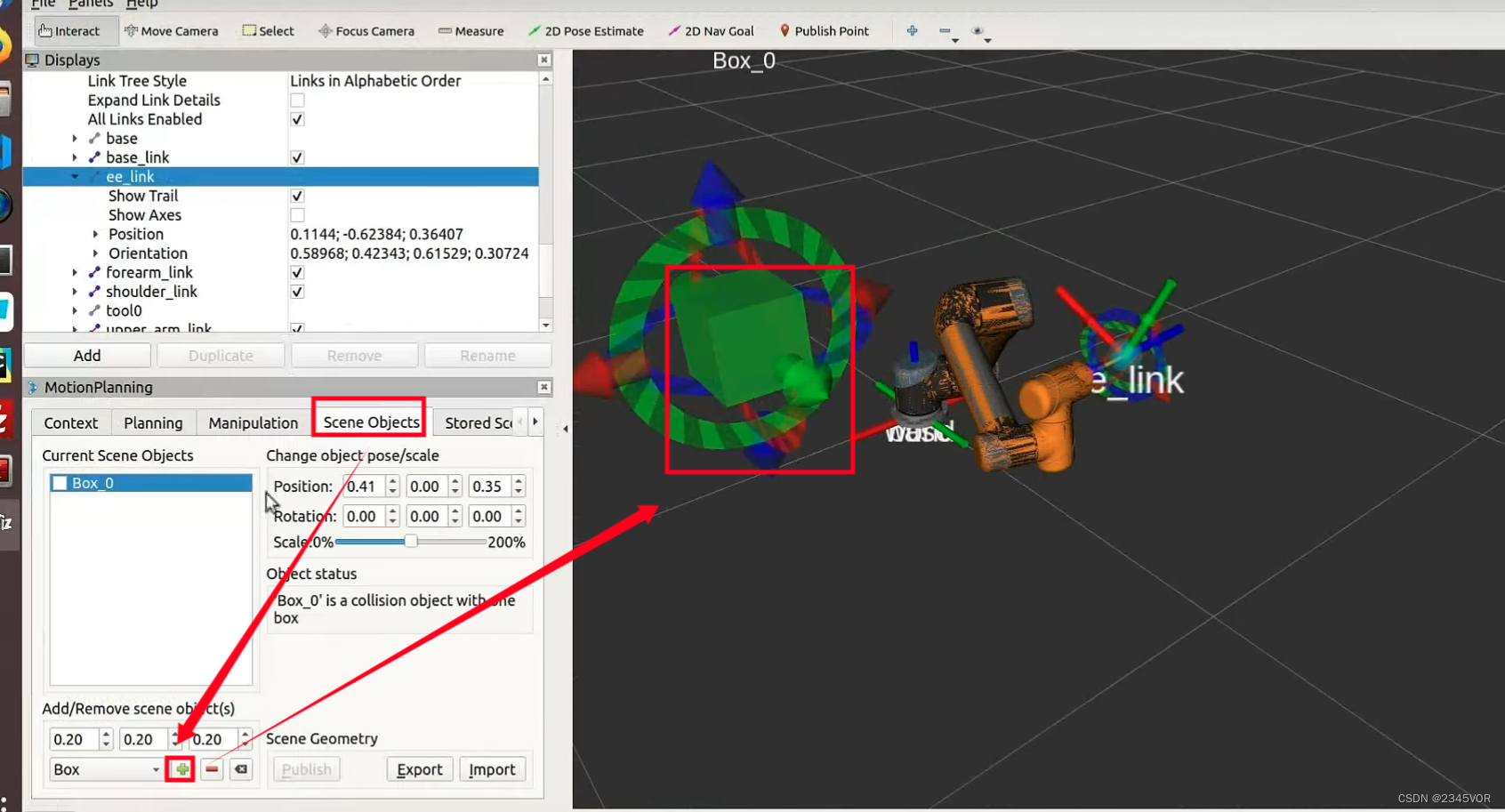 une démo de préhenseur d'obstacles
une démo de préhenseur d'obstacles
roslaunch ur5_gripper_moveit_config demo.launch
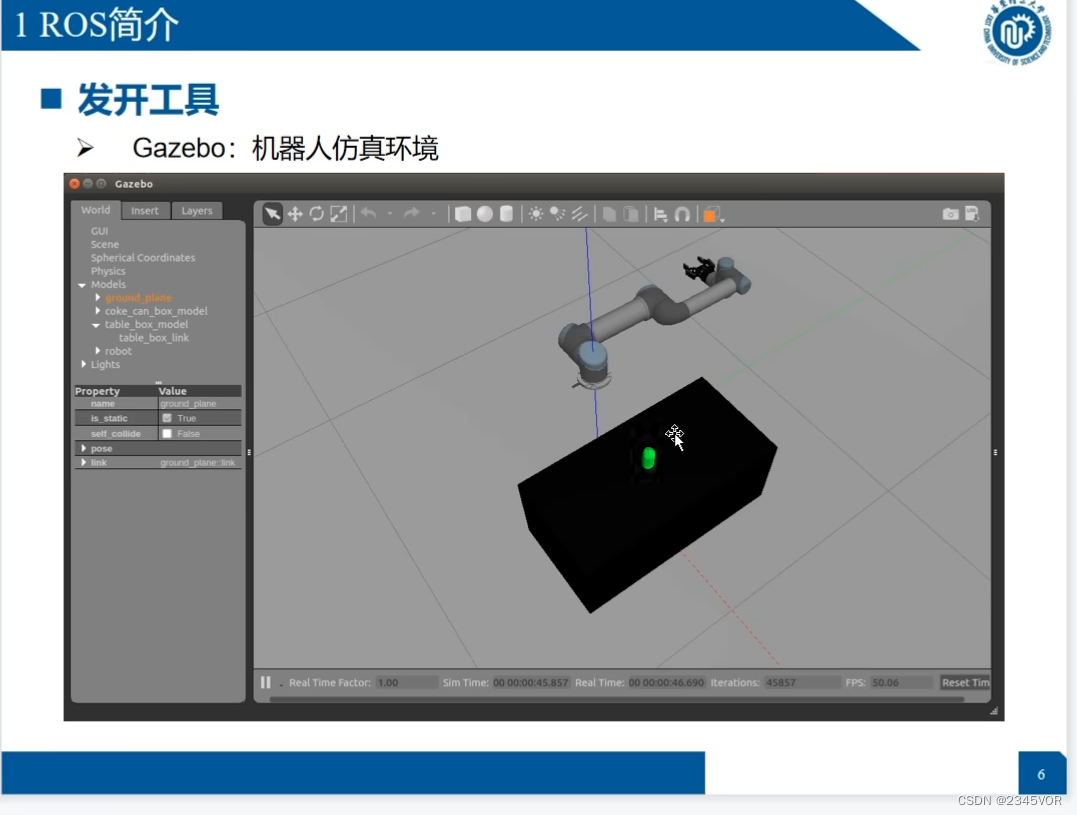
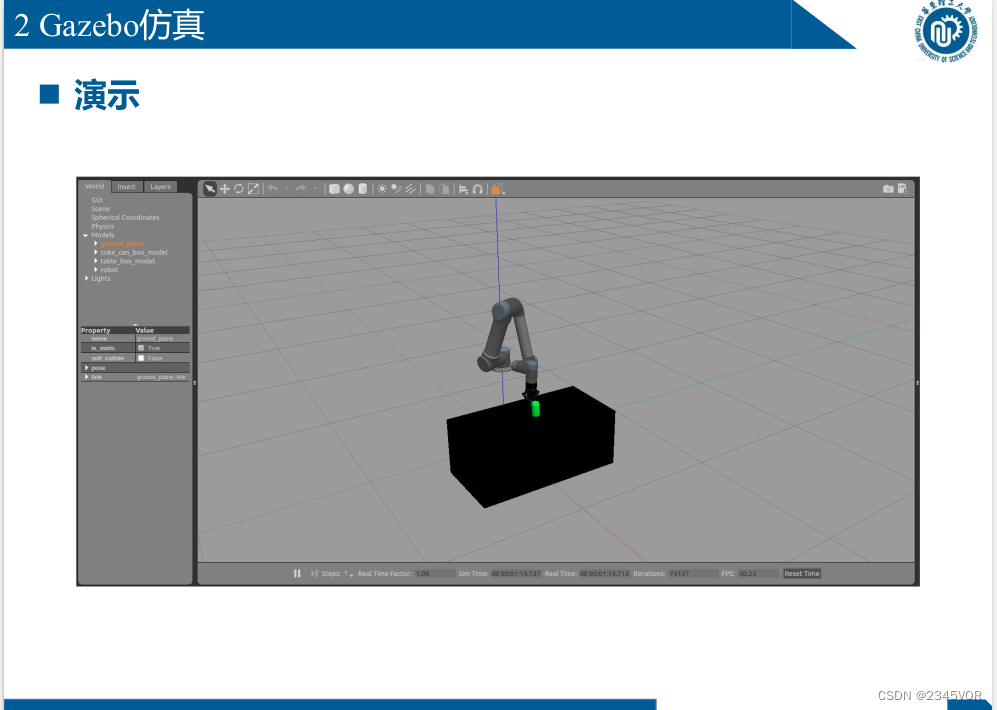
5. Gazebo simule ou contrôle un vrai robot
Hyper Terminal
sudo apt install terminator
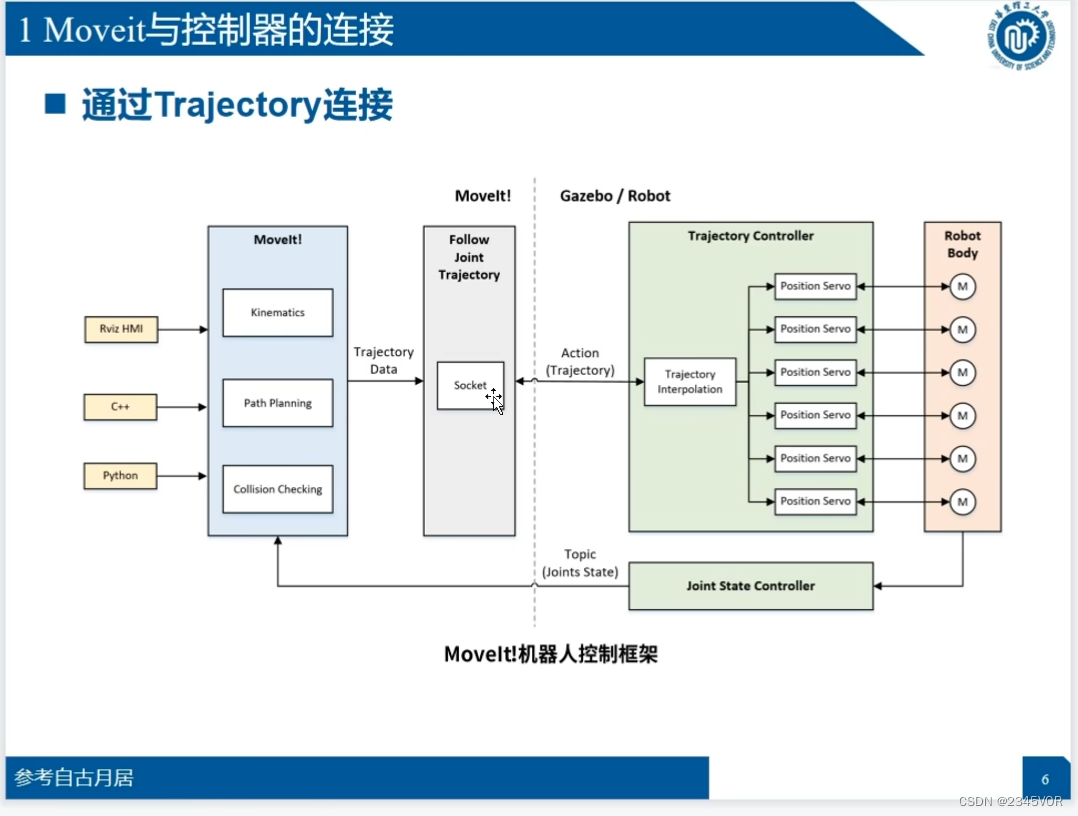
5.1 Connexion entre Moveit et le contrôleur
 Comment utiliser
Comment utiliser
# gazebo仿真中控制机器人
roslaunch ur_gazebo ur5.launch
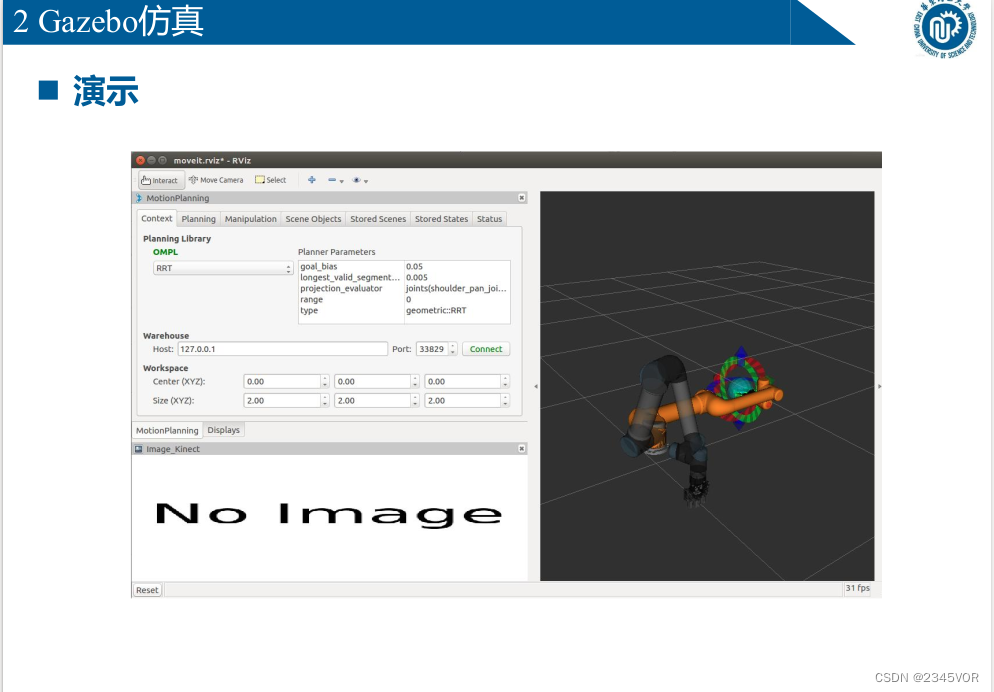
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
roslaunch ur5_moveit_config moveit_rviz.launch config:=true
# 控制真实UR5机器人
一键启动:
roslaunch ur_planning start_ur5.launch
分开启动:
roslaunch ur_modern_driver ur5_bringup.launch
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch
roslaunch ur5_moveit_config moveit_rviz.launch config:=true
# rviz 仅作可视化显示
roslaunch ur5_moveit_config demo.launch
rosrun ur_planning moveitServer.py
5.2 Simulation de belvédère
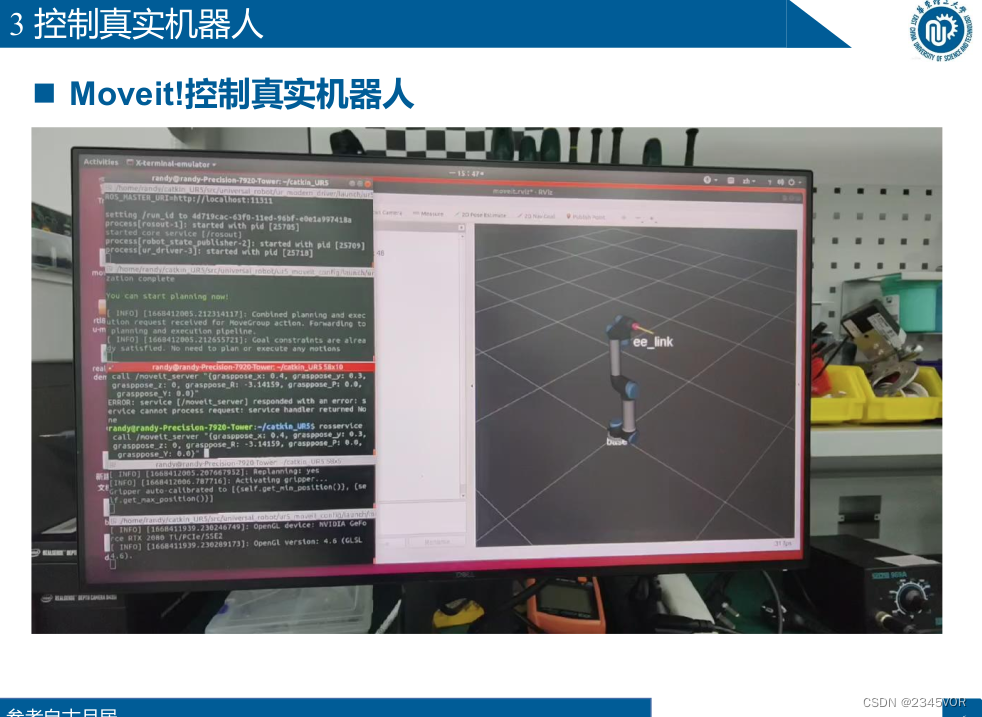
5.3 Contrôler le vrai robot UR5
démarrage à un bouton :
roslaunch ur_planning start_ur5.launch
Commencez séparément :
roslaunch ur_modern_driver ur5_bringup.launch
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch
roslaunch ur5_moveit_config moveit_rviz.launch config:=true
6. Bases de Moveit (python)
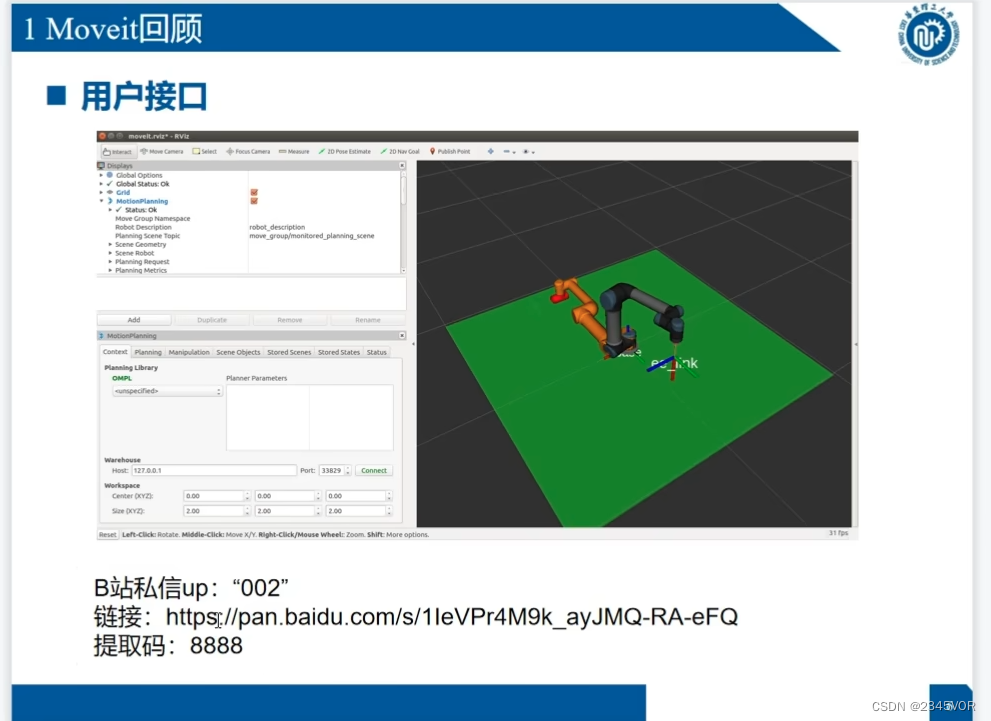
6.1 Examen de Moveit!
6.2 Mouvement spatial conjoint
Installer moveit_commander en Python
sudo apt-get update
sudo apt-get install ros-melodic-moveit-commander
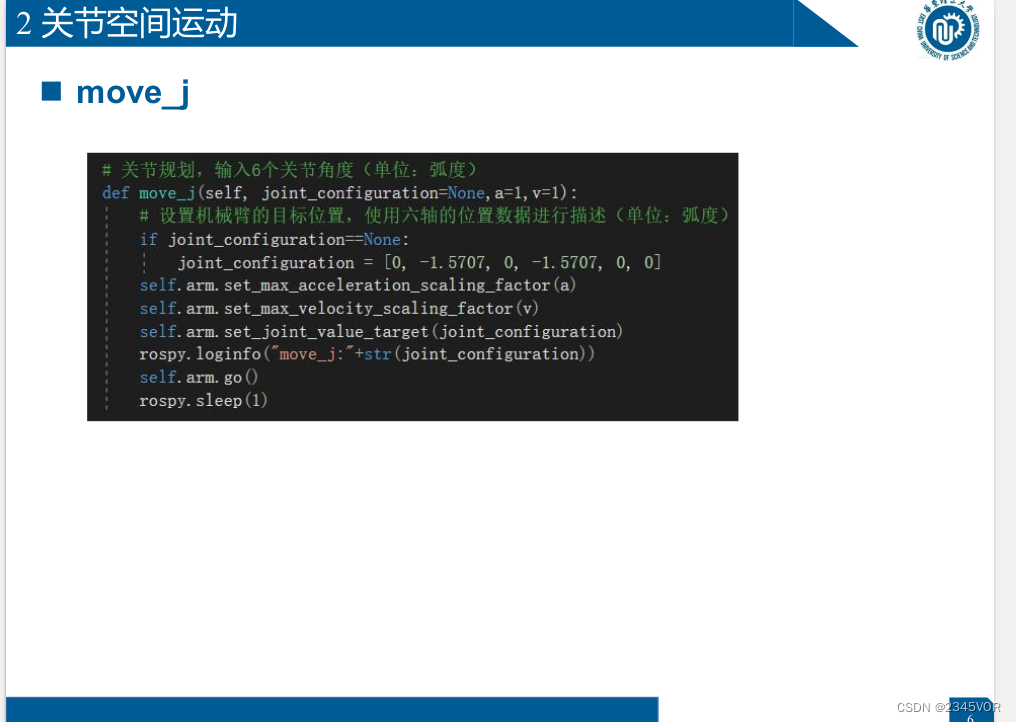
# 关节规划,输入6个关节角度(单位:弧度)
def move_j(self, joint_configuration=None,a=1,v=1):
# 设置机械臂的目标位置,使用六轴的位置数据进行描述(单位:弧度)
if joint_configuration==None:
joint_configuration = [0, -1.5707, 0, -1.5707, 0, 0]
self.arm.set_max_acceleration_scaling_factor(a)
self.arm.set_max_velocity_scaling_factor(v)
self.arm.set_joint_value_target(joint_configuration)
rospy.loginfo("move_j:"+str(joint_configuration))
self.arm.go()
rospy.sleep(1)
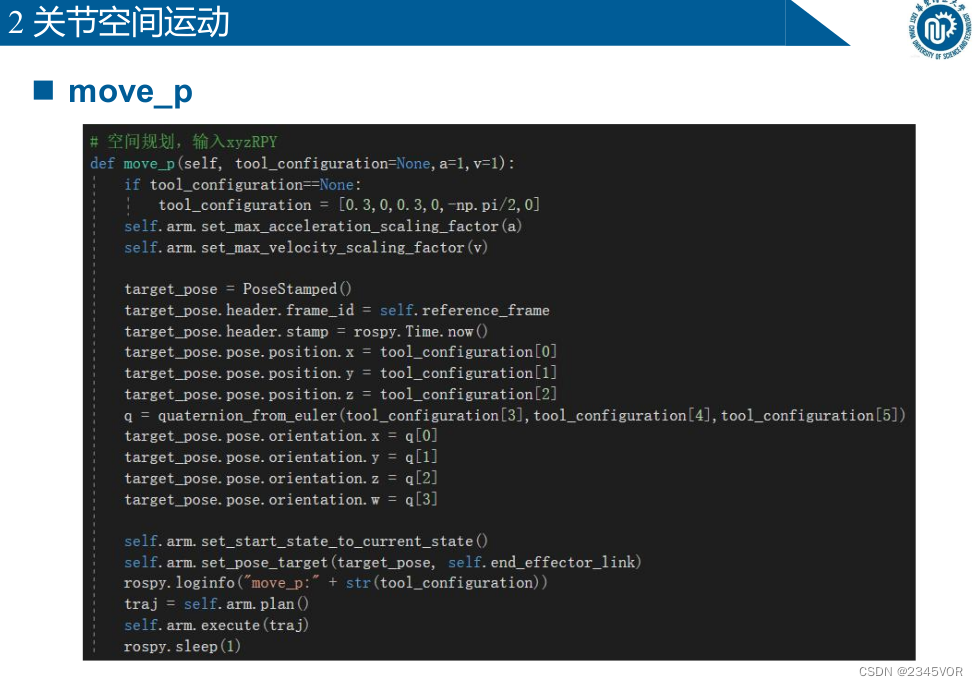
# 空间规划,输入xyzRPY
def move_p(self, tool_configuration=None,a=1,v=1):
if tool_configuration==None:
tool_configuration = [0.3,0,0.3,0,-np.pi/2,0]
self.arm.set_max_acceleration_scaling_factor(a)
self.arm.set_max_velocity_scaling_factor(v)
target_pose = PoseStamped()
target_pose.header.frame_id = self.reference_frame
target_pose.header.stamp = rospy.Time.now()
target_pose.pose.position.x = tool_configuration[0]
target_pose.pose.position.y = tool_configuration[1]
target_pose.pose.position.z = tool_configuration[2]
q = quaternion_from_euler(tool_configuration[3],tool_configuration[4],tool_configuration[5])
target_pose.pose.orientation.x = q[0]
target_pose.pose.orientation.y = q[1]
target_pose.pose.orientation.z = q[2]
target_pose.pose.orientation.w = q[3]
self.arm.set_start_state_to_current_state()
self.arm.set_pose_target(target_pose, self.end_effector_link)
rospy.loginfo("move_p:" + str(tool_configuration))
traj = self.arm.plan()
self.arm.execute(traj)
rospy.sleep(1)
6.3 Mouvement spatial cartésien
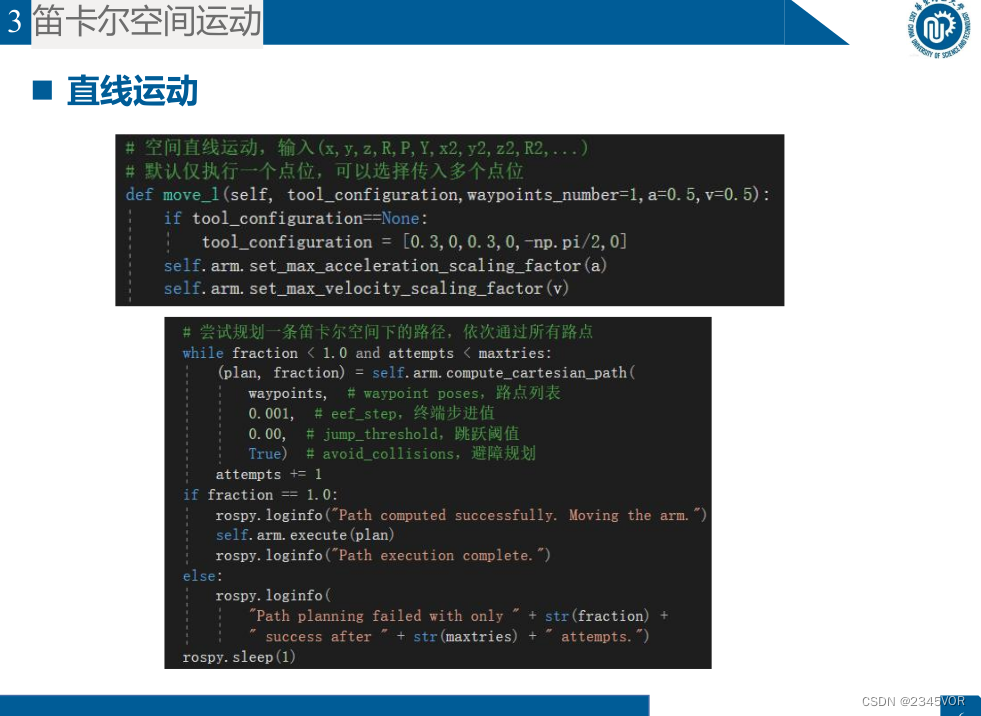
# 空间直线运动,输入(x,y,z,R,P,Y,x2,y2,z2,R2,...)
# 默认仅执行一个点位,可以选择传入多个点位
def move_l(self, tool_configuration,waypoints_number=1,a=0.5,v=0.5):
if tool_configuration==None:
tool_configuration = [0.3,0,0.3,0,-np.pi/2,0]
self.arm.set_max_acceleration_scaling_factor(a)
self.arm.set_max_velocity_scaling_factor(v)
# 设置路点
waypoints = []
for i in range(waypoints_number):
target_pose = PoseStamped()
target_pose.header.frame_id = self.reference_frame
target_pose.header.stamp = rospy.Time.now()
target_pose.pose.position.x = tool_configuration[6*i+0]
target_pose.pose.position.y = tool_configuration[6*i+1]
target_pose.pose.position.z = tool_configuration[6*i+2]
q = quaternion_from_euler(tool_configuration[6*i+3],tool_configuration[6*i+4],tool_configuration[6*i+5])
target_pose.pose.orientation.x = q[0]
target_pose.pose.orientation.y = q[1]
target_pose.pose.orientation.z = q[2]
target_pose.pose.orientation.w = q[3]
waypoints.append(target_pose.pose)
rospy.loginfo("move_l:" + str(tool_configuration))
self.arm.set_start_state_to_current_state()
fraction = 0.0 # 路径规划覆盖率
maxtries = 100 # 最大尝试规划次数
attempts = 0 # 已经尝试规划次数
# 设置机器臂当前的状态作为运动初始状态
self.arm.set_start_state_to_current_state()
# 尝试规划一条笛卡尔空间下的路径,依次通过所有路点
while fraction < 1.0 and attempts < maxtries:
(plan, fraction) = self.arm.compute_cartesian_path(
waypoints, # waypoint poses,路点列表
0.001, # eef_step,终端步进值
0.00, # jump_threshold,跳跃阈值
True) # avoid_collisions,避障规划
attempts += 1
if fraction == 1.0:
rospy.loginfo("Path computed successfully. Moving the arm.")
self.arm.execute(plan)
rospy.loginfo("Path execution complete.")
else:
rospy.loginfo(
"Path planning failed with only " + str(fraction) +
" success after " + str(maxtries) + " attempts.")
rospy.sleep(1)
6.4 Interaction avec l'environnement
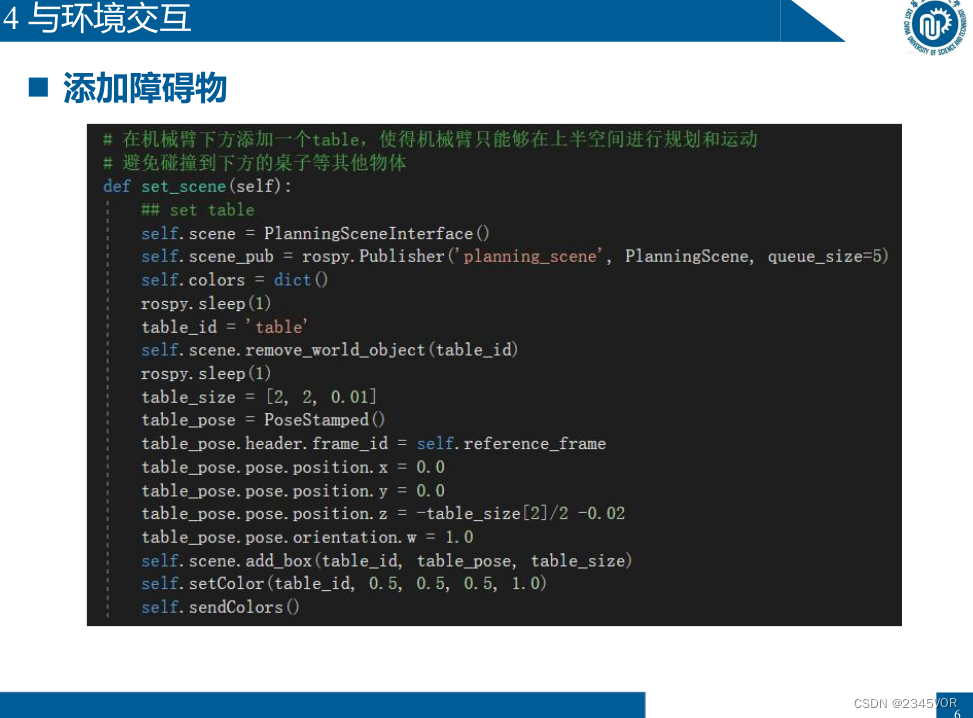
# 在机械臂下方添加一个table,使得机械臂只能够在上半空间进行规划和运动
# 避免碰撞到下方的桌子等其他物体
def set_scene(self):
## set table
self.scene = PlanningSceneInterface()
self.scene_pub = rospy.Publisher('planning_scene', PlanningScene, queue_size=5)
self.colors = dict()
rospy.sleep(1)
table_id = 'table'
self.scene.remove_world_object(table_id)
rospy.sleep(1)
table_size = [2, 2, 0.01]
table_pose = PoseStamped()
table_pose.header.frame_id = self.reference_frame
table_pose.pose.position.x = 0.0
table_pose.pose.position.y = 0.0
table_pose.pose.position.z = -table_size[2]/2 -0.02
table_pose.pose.orientation.w = 1.0
self.scene.add_box(table_id, table_pose, table_size)
self.setColor(table_id, 0.5, 0.5, 0.5, 1.0)
self.sendColors()
7. Fondation Moveit (C++) pour réaliser une planification de chemin avec des contraintes
8. Motion Planning - Comment choisir l'algorithme de planification dans Moveit ?
8.1 Pourquoi la planification du chemin est nécessaire
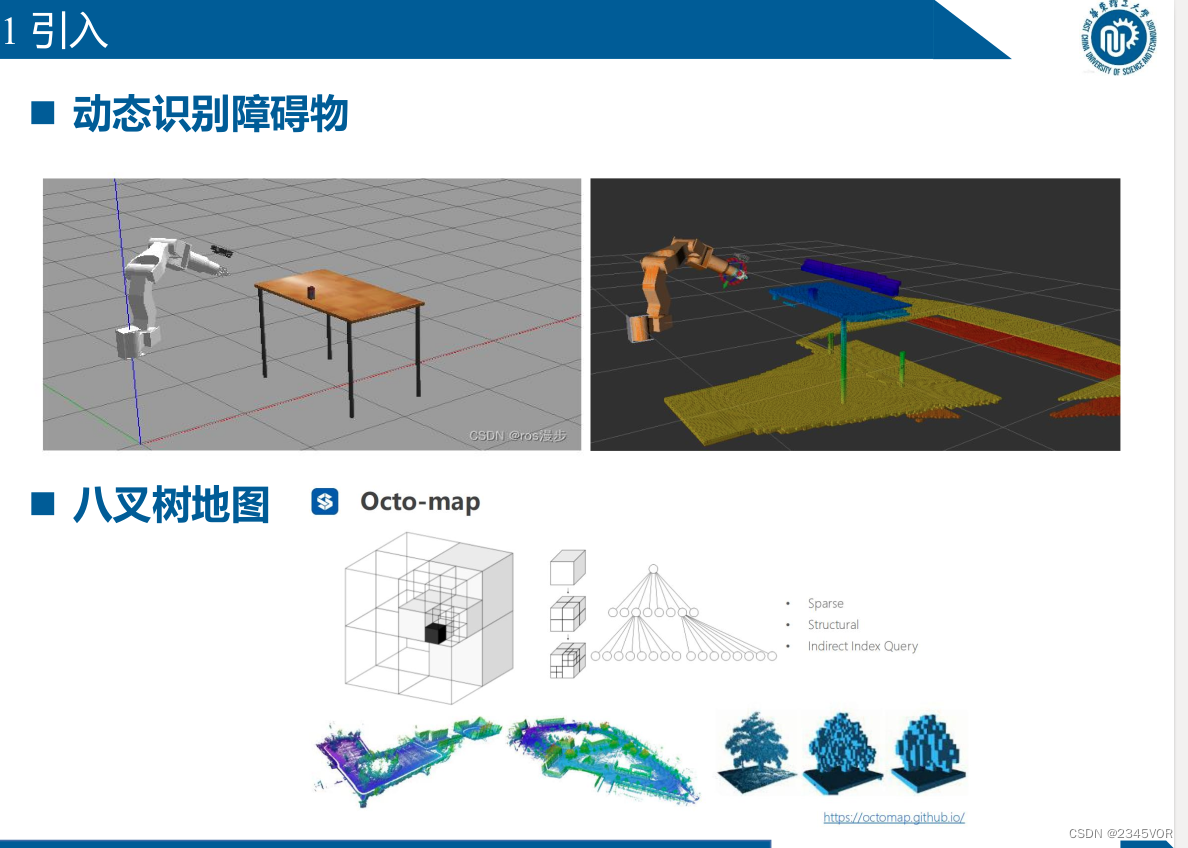
Ø Évitement d'obstacles : éviter les collisions avec des objets statiques à proximité du bras robotique tels que des tables ; éviter
les collisions avec des objets dynamiques tels que des personnes (s'approchant soudainement)
Ø La tâche a des exigences sur la trajectoire de mouvement : avec des contraintes cinématiques ou dynamiques, telles que le soudage , Prenez
une tasse remplie d'eau , etc.
n Classification de planification de chemin
Ø Basé sur la recherche, Dijkstra, A*, Anytime A*, ARA*, D*
Ø Basé sur l'échantillonnage, PRM, RRT, RRT-connect, RRT*, Kinodynamic-
RRT* (Conforming to dynamics), Anytime RRT*, Informed RRT*
Ø Algorithmes intelligents tels que l'algorithme génétique, l'algorithme de colonie de fourmis
 Algorithme de planification de chemin basé sur l'échantillonnage
Algorithme de planification de chemin basé sur l'échantillonnage
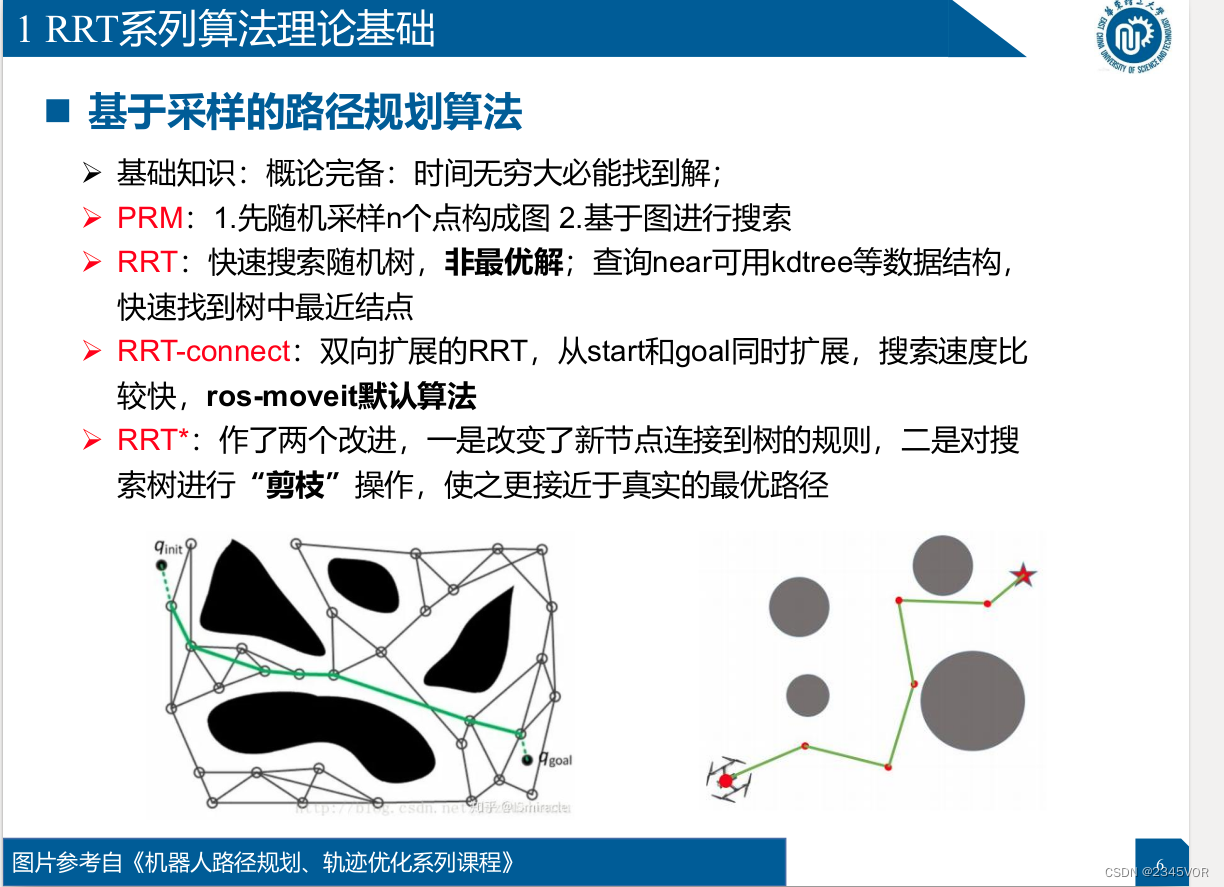
Ø Connaissances de base : introduction complète : la solution sera trouvée lorsque le temps sera infini ;
Ø PRM : 1. Premier échantillonnage aléatoire de n points pour former Figure 2. Recherche basée sur des graphes
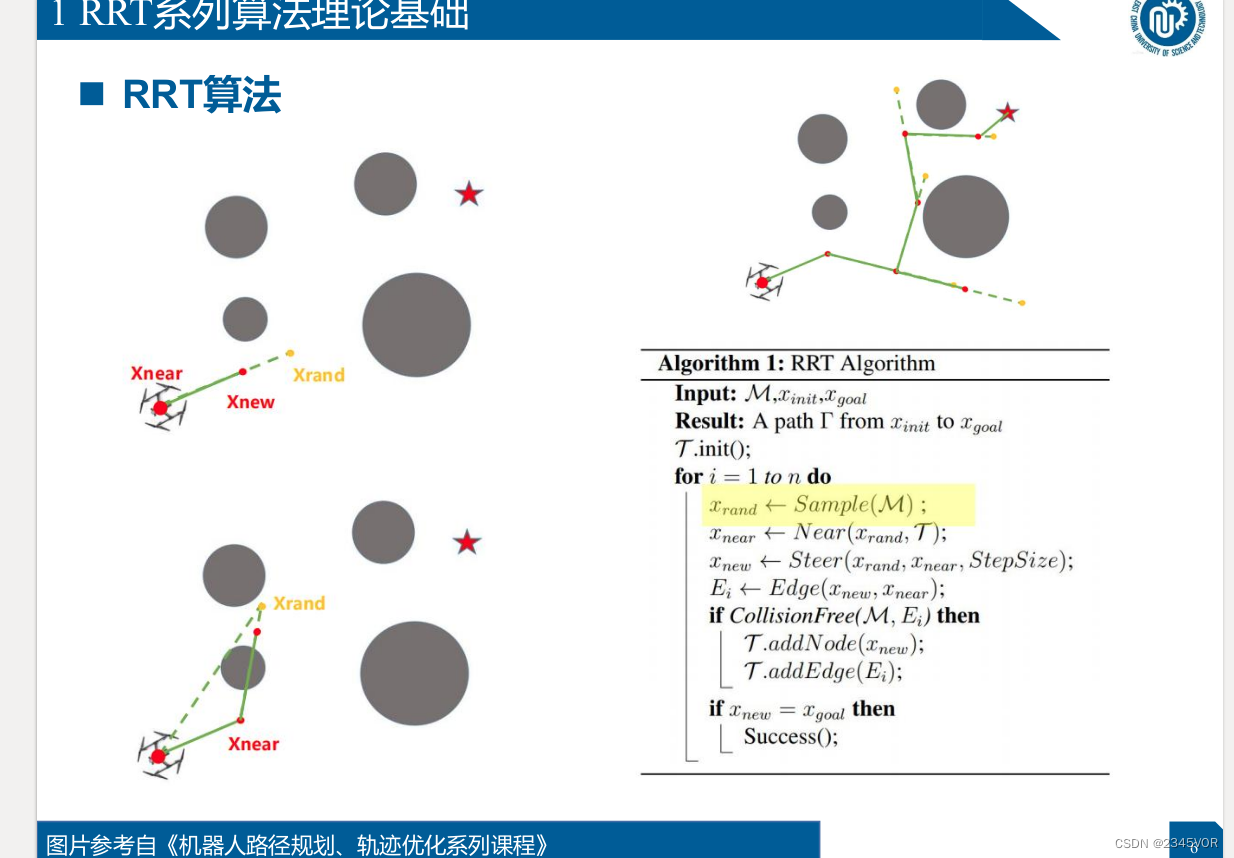
Ø RRT : recherche rapide d'arbres aléatoires, de solutions non optimales ; l'interrogation de proximité peut utiliser kdtree et d'autres structures de données pour
trouver rapidement le nœud le plus proche dans le arbre
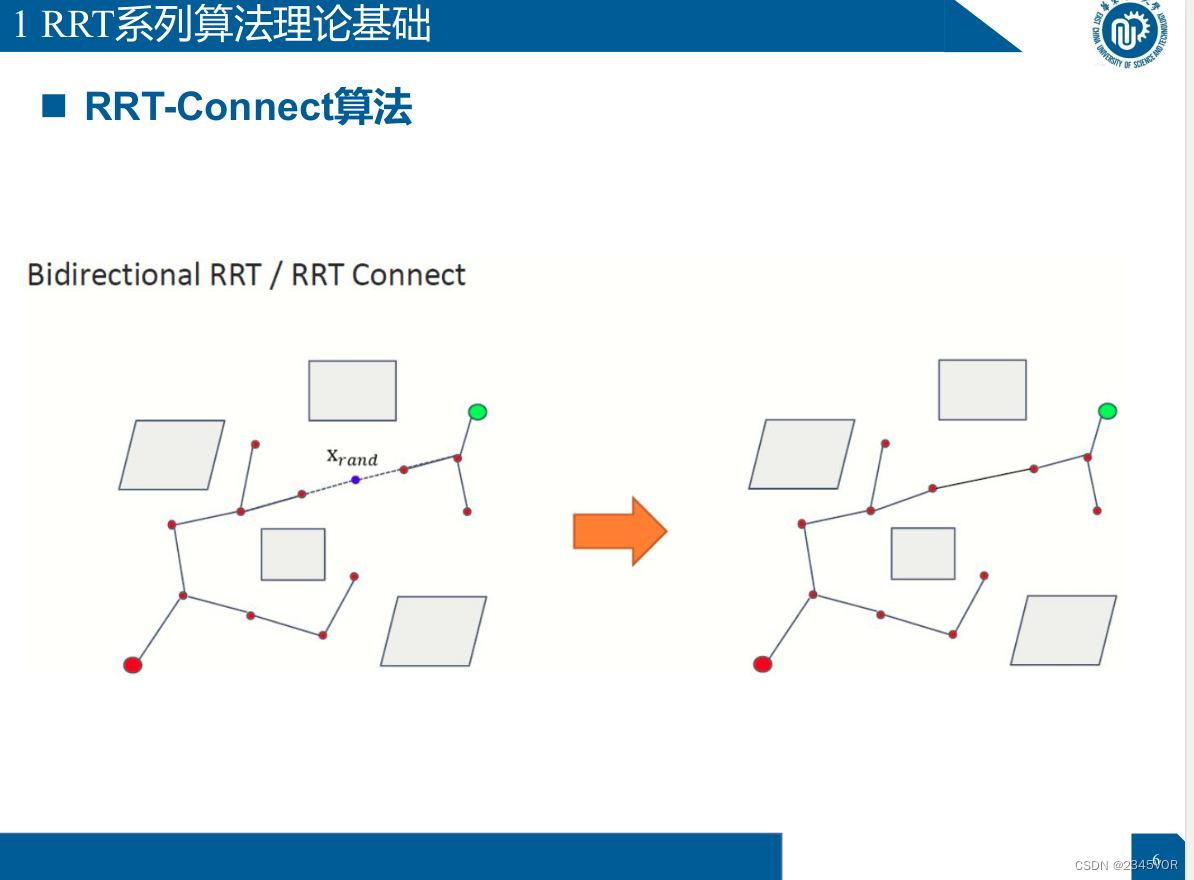
Ø RRT-connect : RRT bidirectionnel étendu, s'étendre à partir du début et de l'objectif en même temps, et la vitesse de recherche est relativement
rapide. L'algorithme par défaut de ros-moveit
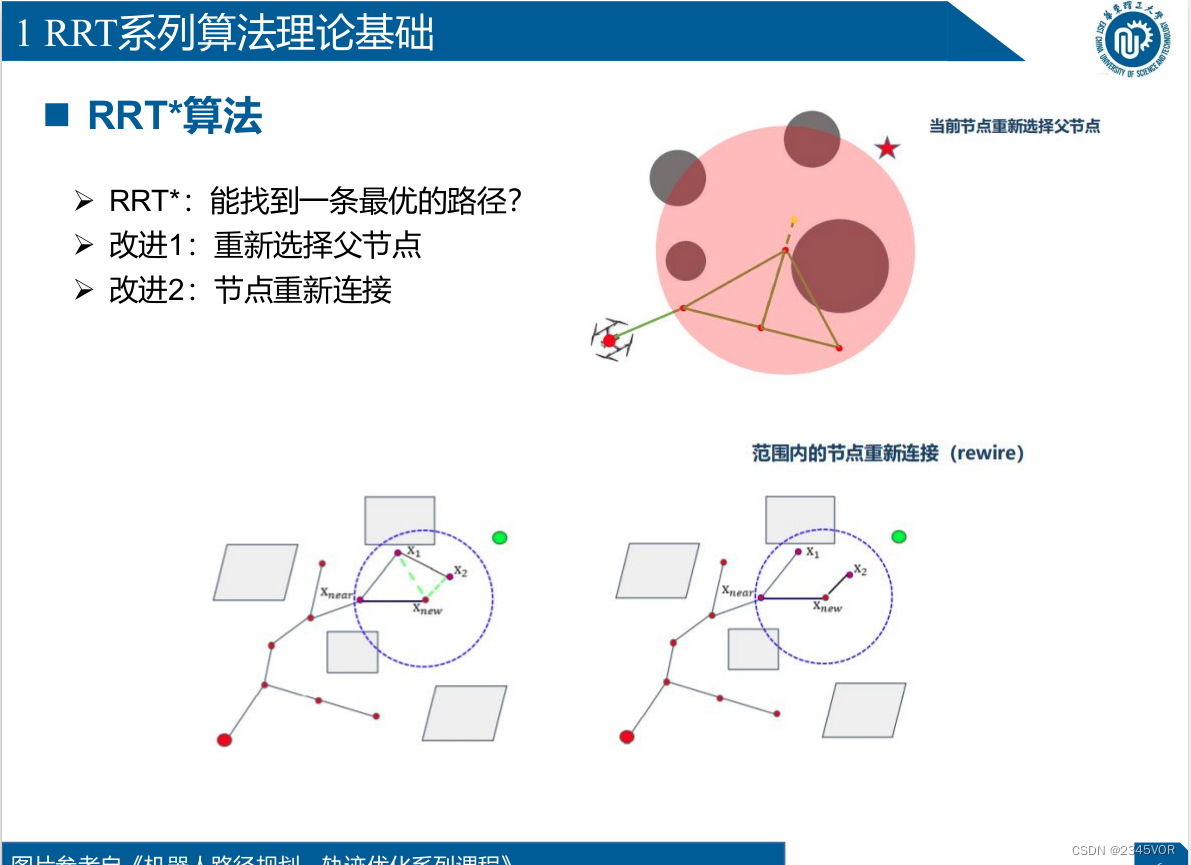
Ø RRT* : deux améliorations ont été apportées, l'une consiste à modifier le règles pour connecter de nouveaux nœuds à l'arborescence, et l'autre consiste à "élaguer" l'opération d'arborescence
de recherche pour la rendre plus proche du chemin optimal réel
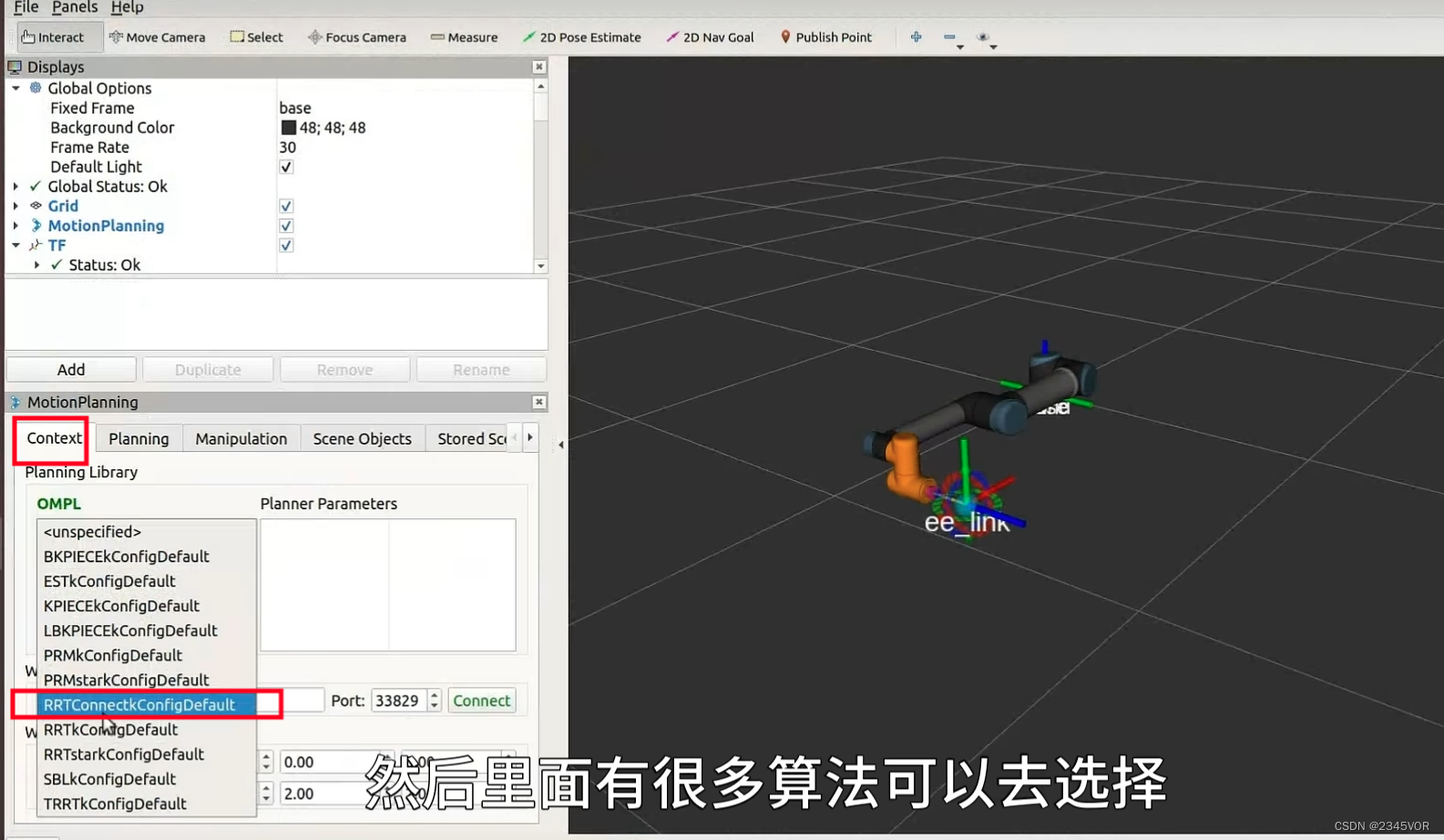
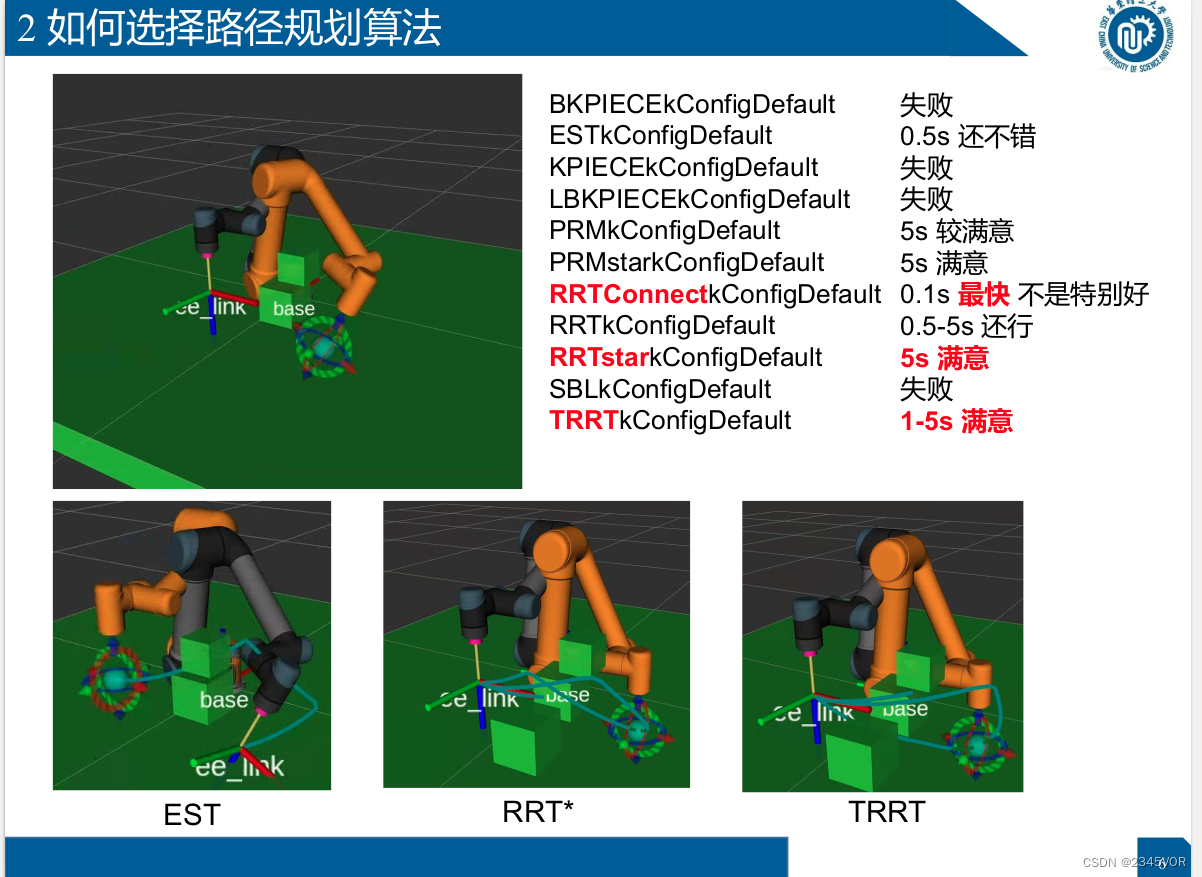
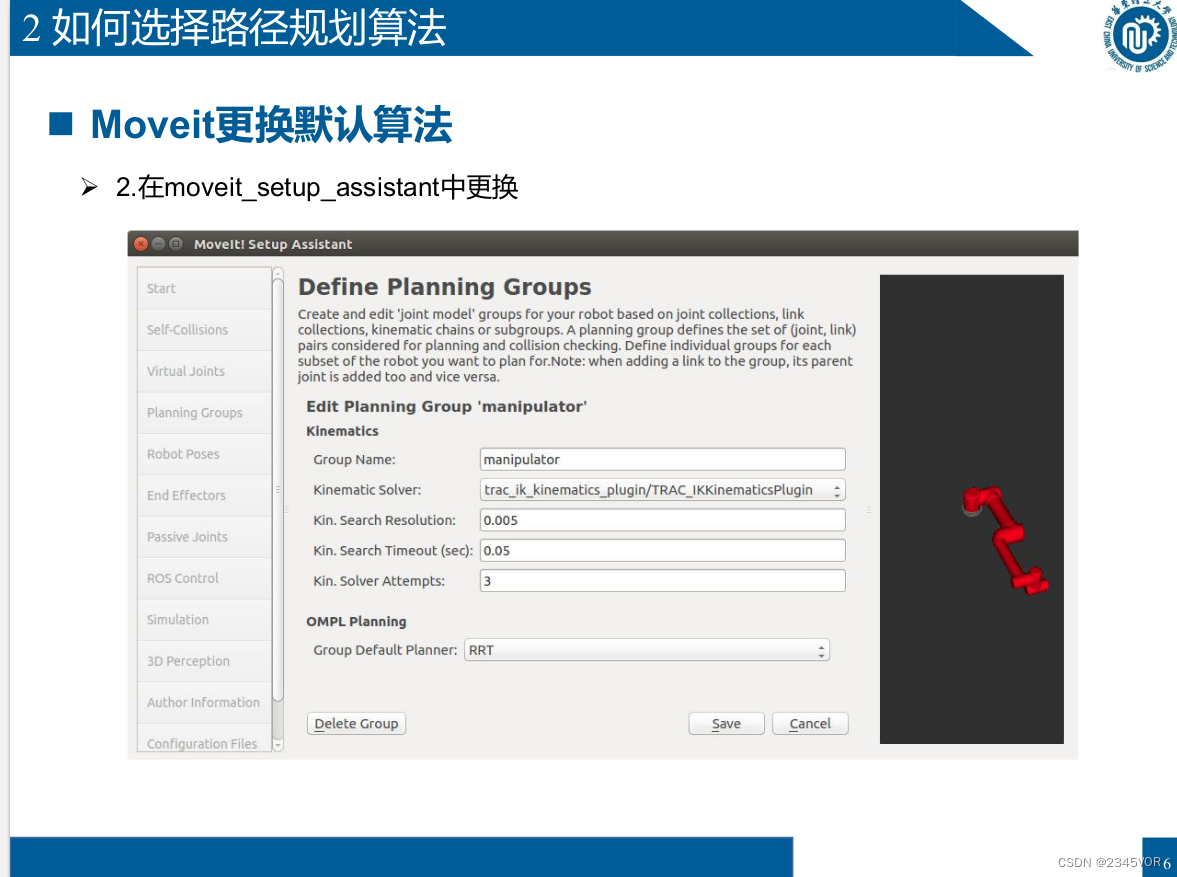
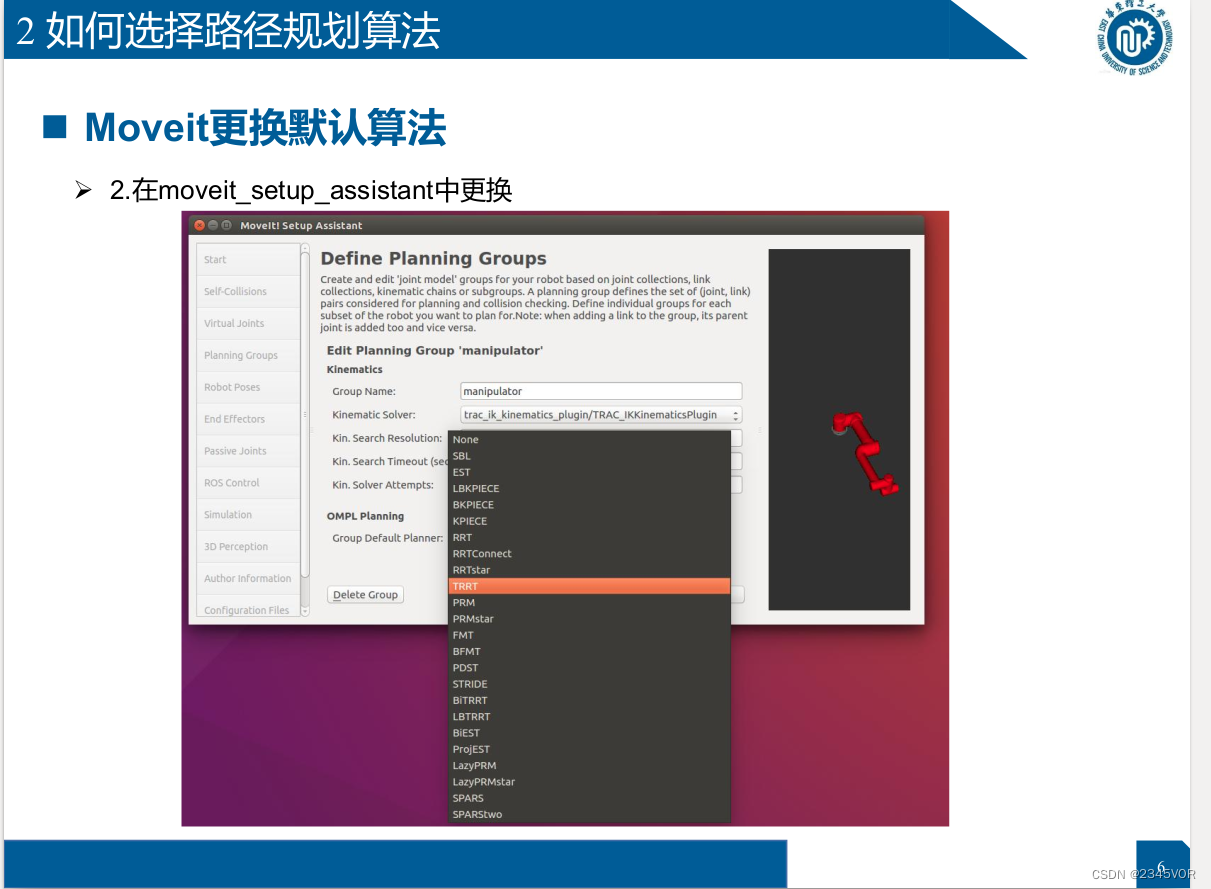
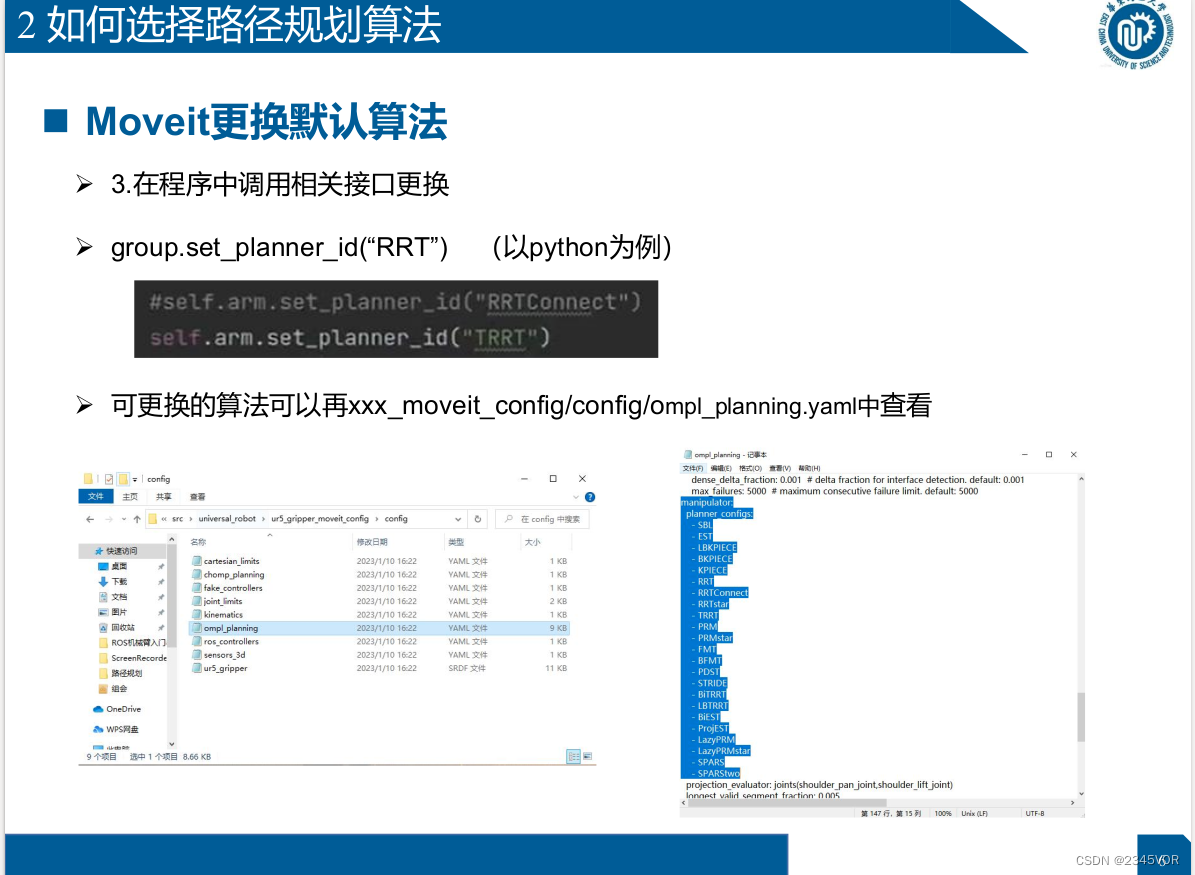
8.2 Comment choisir un algorithme de planification de trajectoire

- Rviz

- Moveit_setup_assistant
- dans le programme
9. Évitement d'obstacle visuel

9.1 Présentation
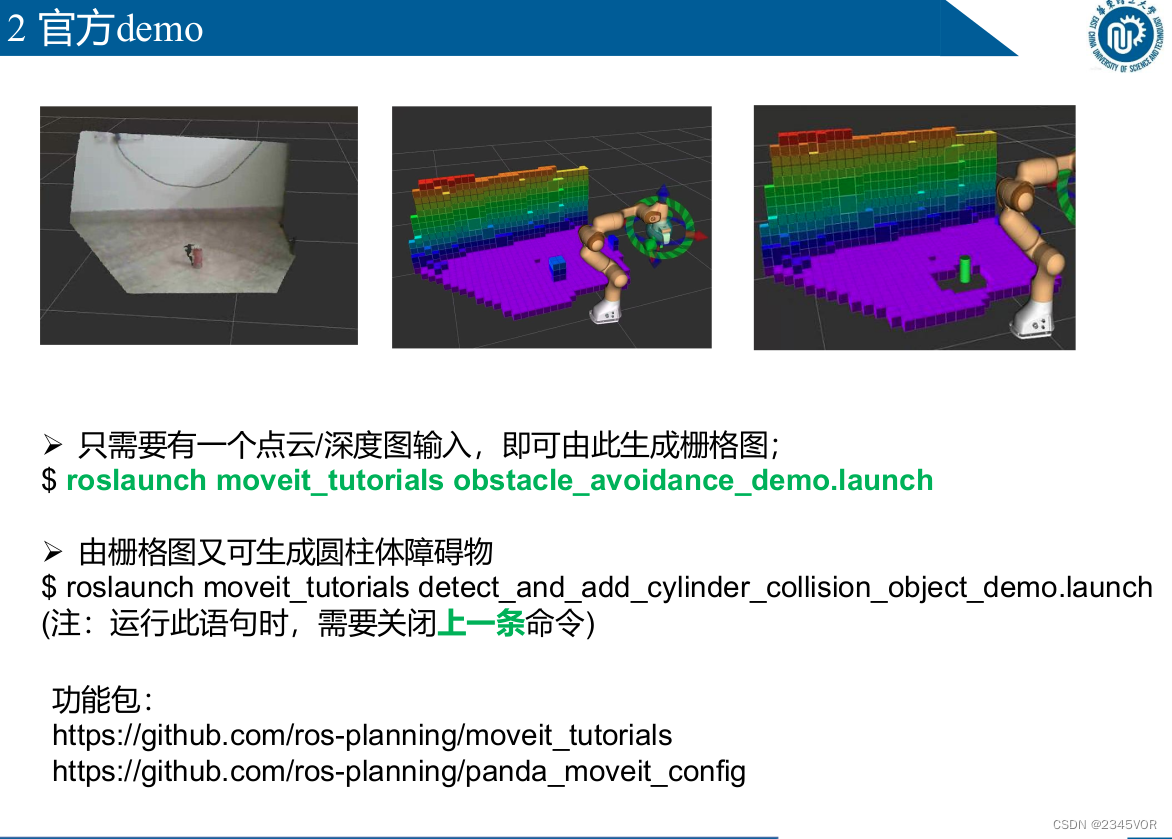
9.2 Démo officielle
Ø Une seule entrée de nuage de points/carte de profondeur est nécessaire pour générer une carte raster ;
$ roslaunch moveit_tutorials obstacle_avoidance_demo.launch
Ø Les obstacles cylindriques peuvent être générés à partir de la carte quadrillée
$ roslaunch moveit_tutorials detect_and_add_cylinder_collision_object_demo.launch
(Remarque : lors de l'exécution de cette instruction, vous devez fermer la commande précédente)
Package de fonctions :
https://github.com/ros-planning/moveit_tutorials
https://github.com/ros-planning/panda_moveit_config
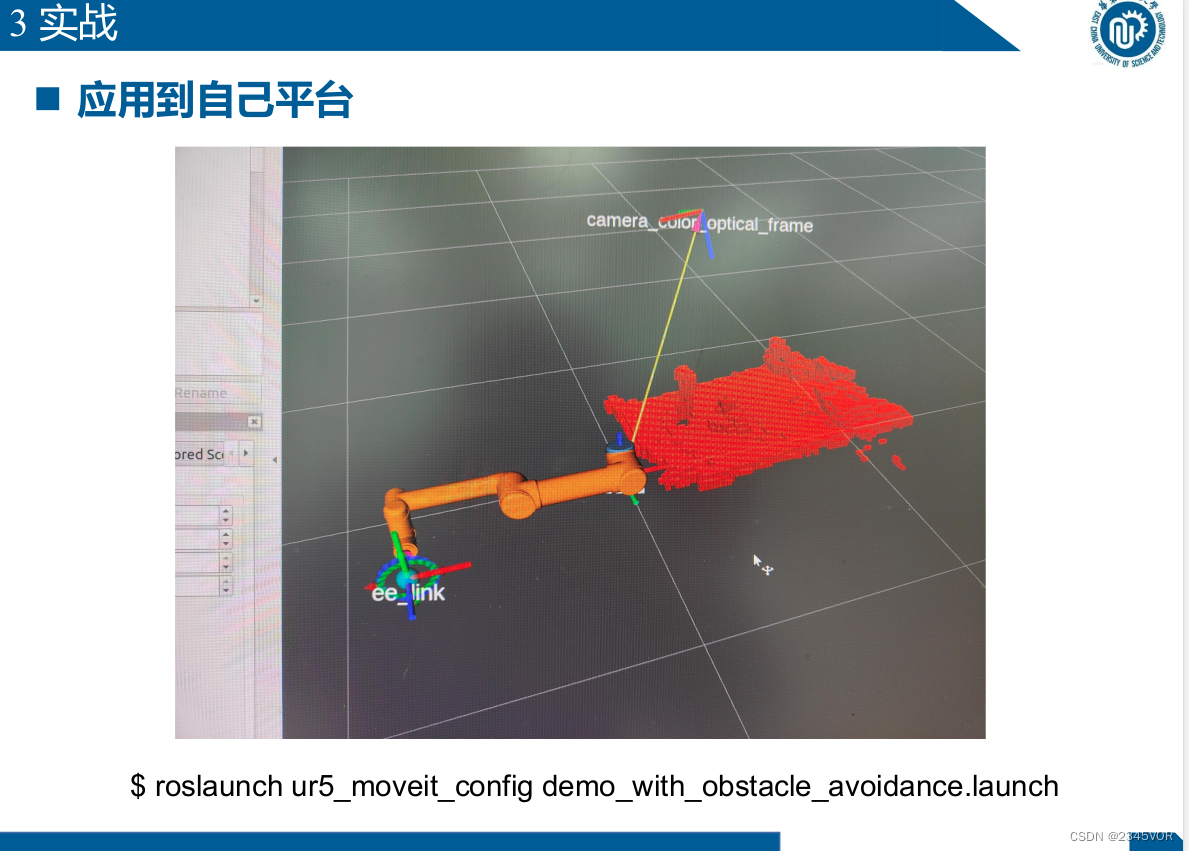
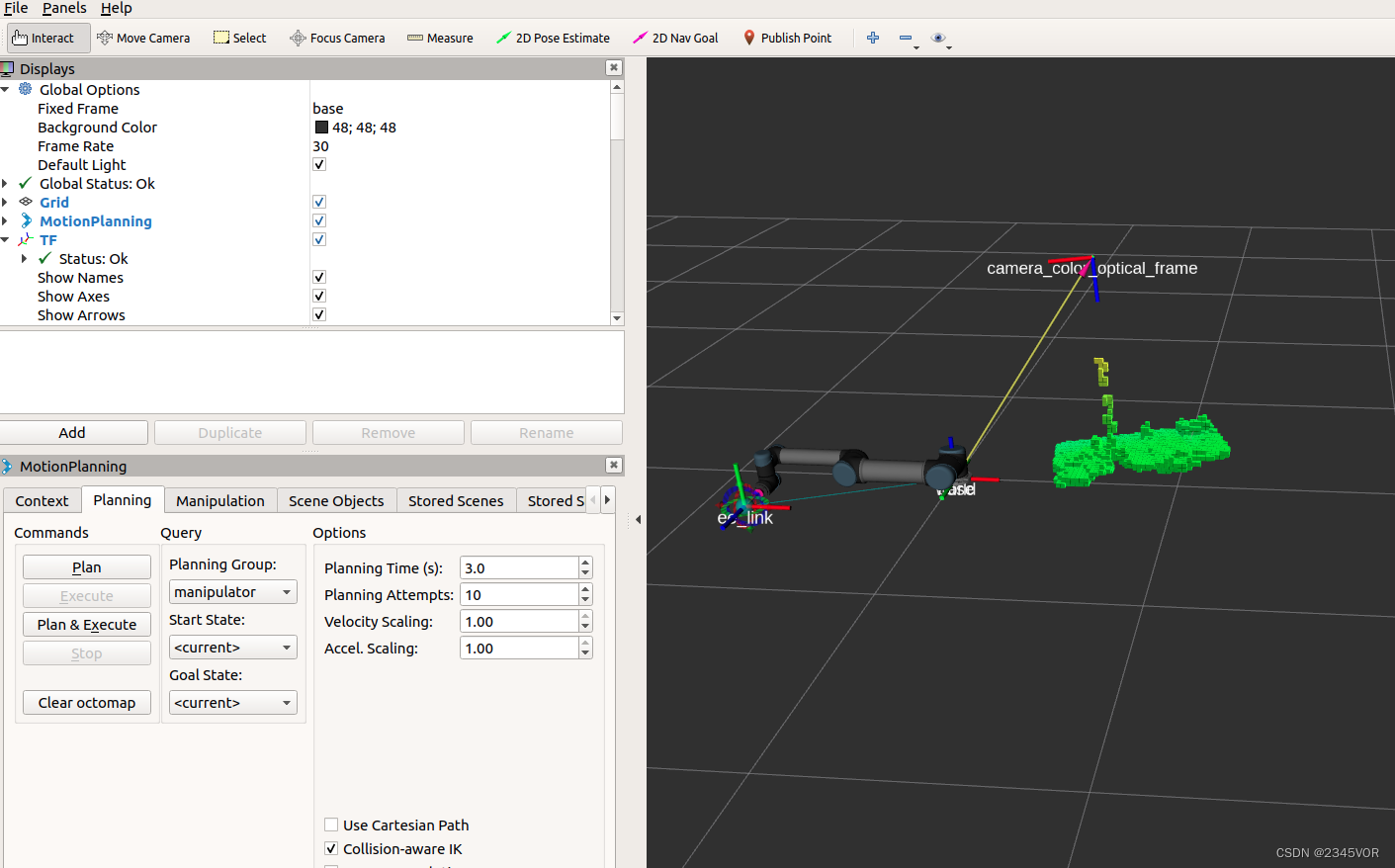
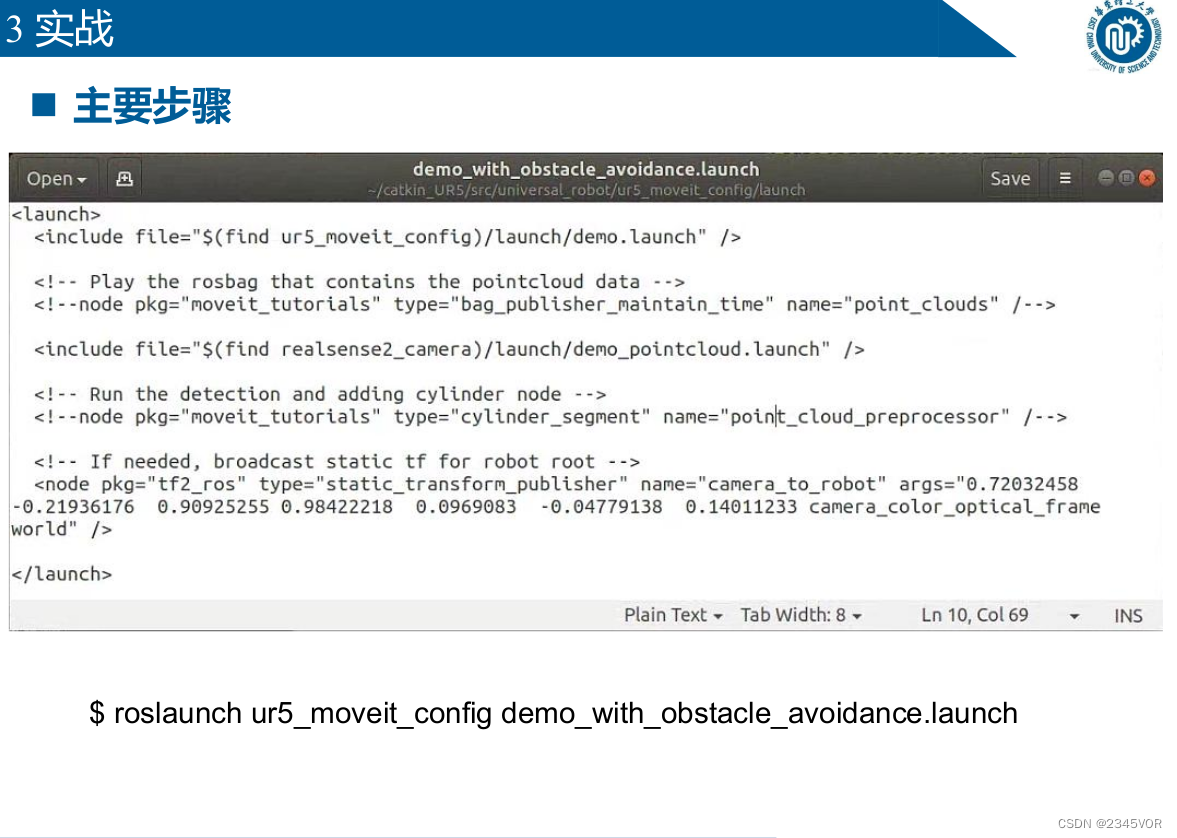
9.3 Combat réel
roslaunch ur5_moveit_config demo_with_obstacle_avoidance.launch
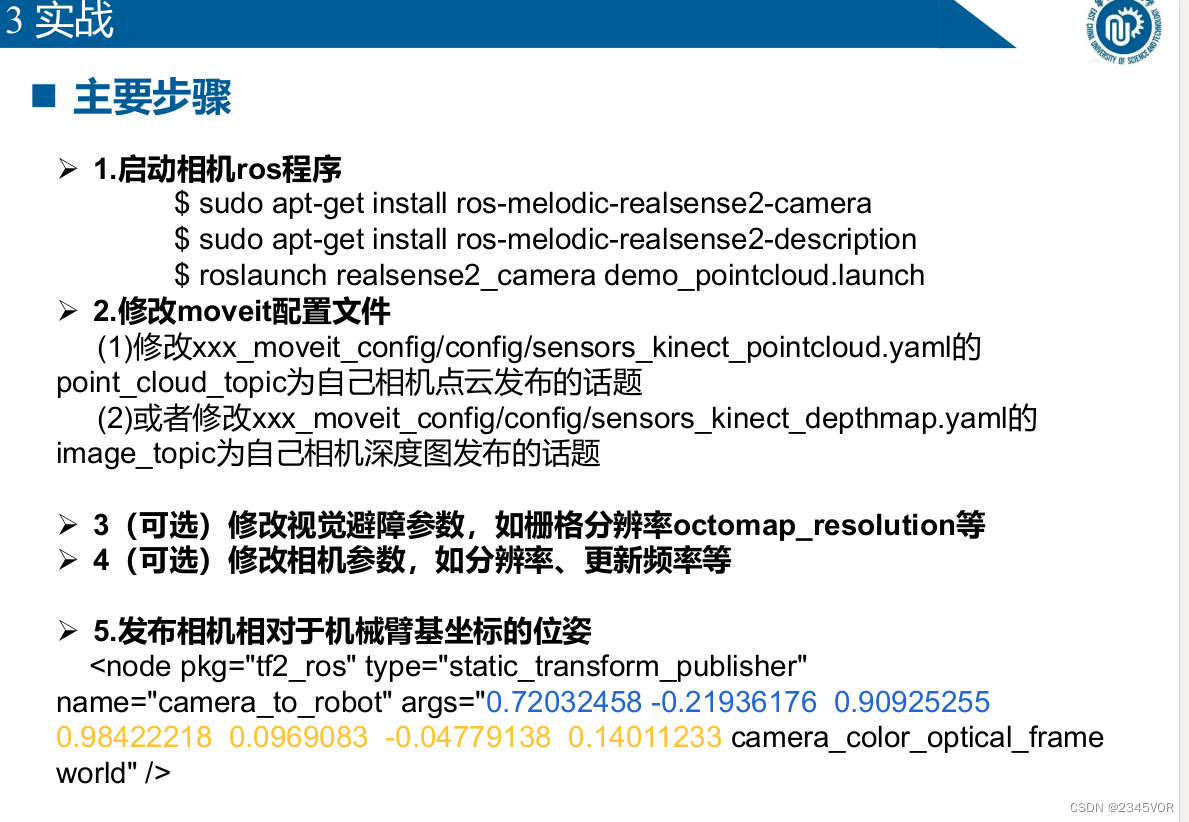
Principales étapes
Ø 1. Démarrer le programme camera ros
$ sudo apt-get install ros-melodic-realsense2-camera
$ sudo apt-get install ros-melodic-realsense2-description
$ roslaunch realsense2_camera demo_pointcloud.launch
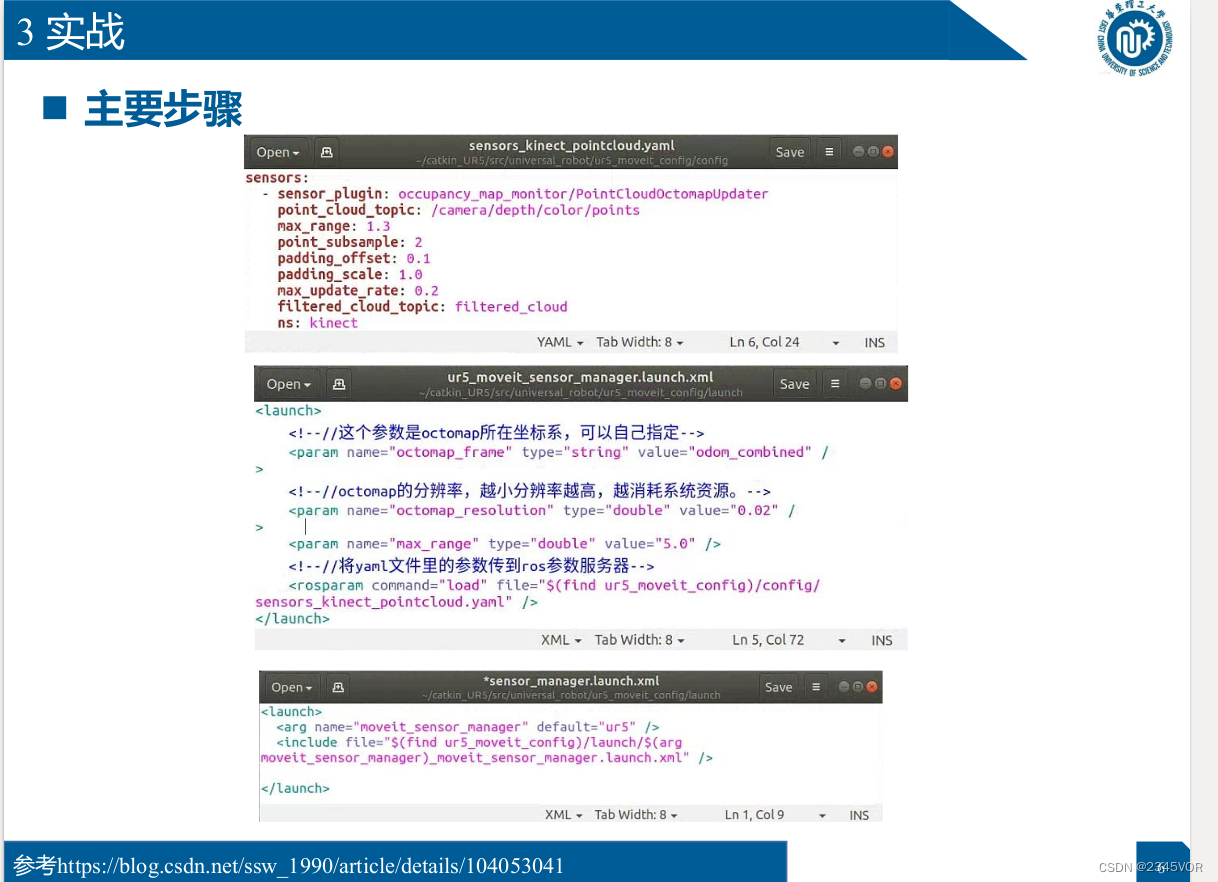
Ø 2. Modifier le fichier de configuration de moveit
(1) Modifier le point_cloud_topic de xxx_moveit_config/config/sensors_kinect_pointcloud.yaml pour être
le sujet publié par votre nuage de points de caméra
(2) ou modifier le image_topic de xxx_moveit_config/config/sensors_kinect_depthmap.yaml
pour être le sujet publié par votre propre carte de profondeur de caméra
Ø 3 (Facultatif) Modifier les paramètres d'évitement d'obstacles visuels, tels que la résolution de la grille octomap_resolution, etc.
Ø 4 (Facultatif) Modifier les paramètres de la caméra, tels que la résolution, la fréquence de mise à jour, etc.
Ø 5. Publier le position de la caméra par rapport aux coordonnées de base du manipulateur
<node pkg="tf2_ros" type="static_transform_publisher"
name="camera_to_robot" args="0.72032458 -0.21936176 0.90925255
0.98422218 0.0969083 -0.04779138 0.14011233 camera_color_optical_frame
world" />
roslaunch ur5_moveit_config demo_with_obstacle_avoidance.launch
Référence https://blog.csdn.net/ssw_1990/article/details/104053041
 Référence https://blog.csdn.net/ssw_1990/article/details/104053041
Référence https://blog.csdn.net/ssw_1990/article/details/104053041
10. ROS et apprentissage en profondeur
10.1 Présentation
ROS-Moveit !
ROS-melodic以及之前版本Moveit!默认使用python2.7
ROS-noetic以及ROS2支持python3
Deep learning
Le deep learning utilise python3, et le deep learning a généralement besoin de configurer l'environnement dans un environnement virtuel
Comment intégrer le deep learning dans ROS ?
10. 2 Combat réel
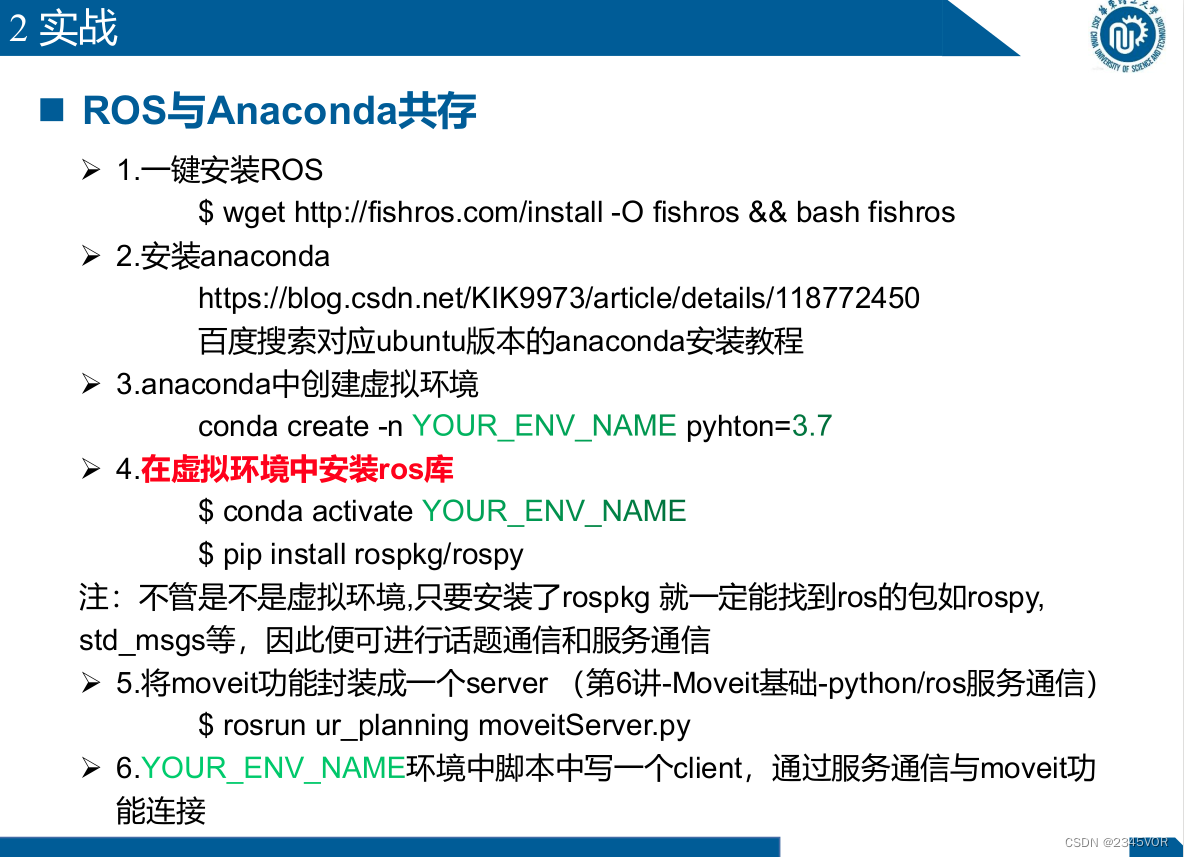
n Coexistence de ROS et Anaconda
Ø 1. Installation de ROS en un clic
$ wget http://fishros.com/install -O fishros && bash fishros
Ø 2. Installer anaconda
https://blog.csdn.net/KIK9973/article/details/118772450
Baidu recherche le tutoriel d'installation anaconda correspondant à la version ubuntu
Ø 3. Créer un environnement virtuel dans anaconda
conda create -n YOUR_ENV_NAME
pyhton=3.7
Ø 4. Installer la bibliothèque ros dans l'environnement virtuel
$ conda activate
$ pip install rospkg/rospy
Remarque : qu'il s'agisse d'un environnement virtuel ou non, tant que rospkg est installé, vous pourrez trouver des packages ros tels que rospy,
std_msgs, etc., afin que la communication de sujet et la communication de service puissent être effectuées
. Encapsuler la fonction moveit dans un serveur (Cours 6 - Communication du service Moveit Basic-python/ros)
$ rosrun ur_planning moveitServer.py
Ø 6. Écrivez un client dans le script dans l'environnement et connectez-vous à la fonction moveit via la communication de service
11. Réalisez une capture visuelle 6-DOF basée sur ROS-Moveit
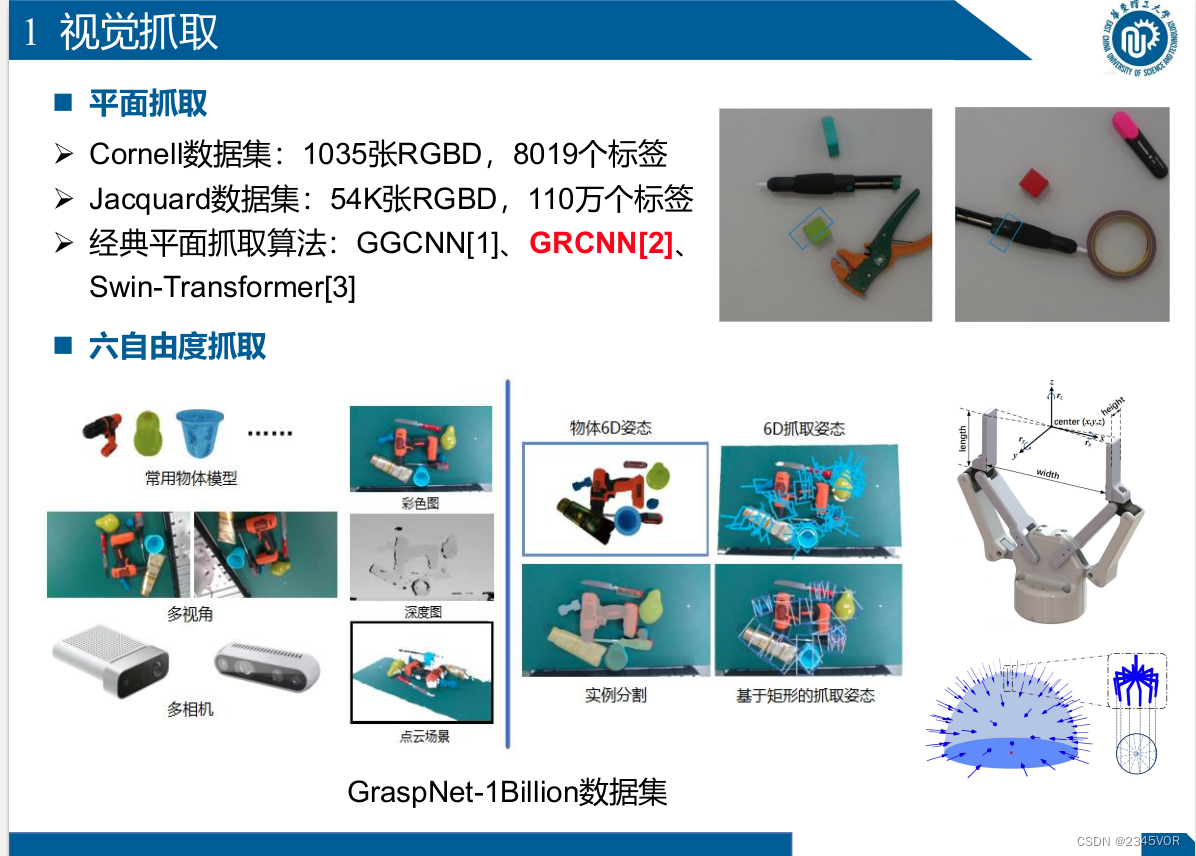
11.1 Saisie visuelle
- Capture de plan
Ø Jeu de données Cornell : 1035 images RGBD, 8019 étiquettes
Ø Jeu de données Jacquard : 54K images RGBD, 1,1 million d'étiquettes
Ø Algorithme de capture de plan classique : GGCNN[1], GRCNN[2],
Swin-Transformer[3] ] - Six degrés de liberté pour saisir
l'ensemble de données GraspNet-1Billion
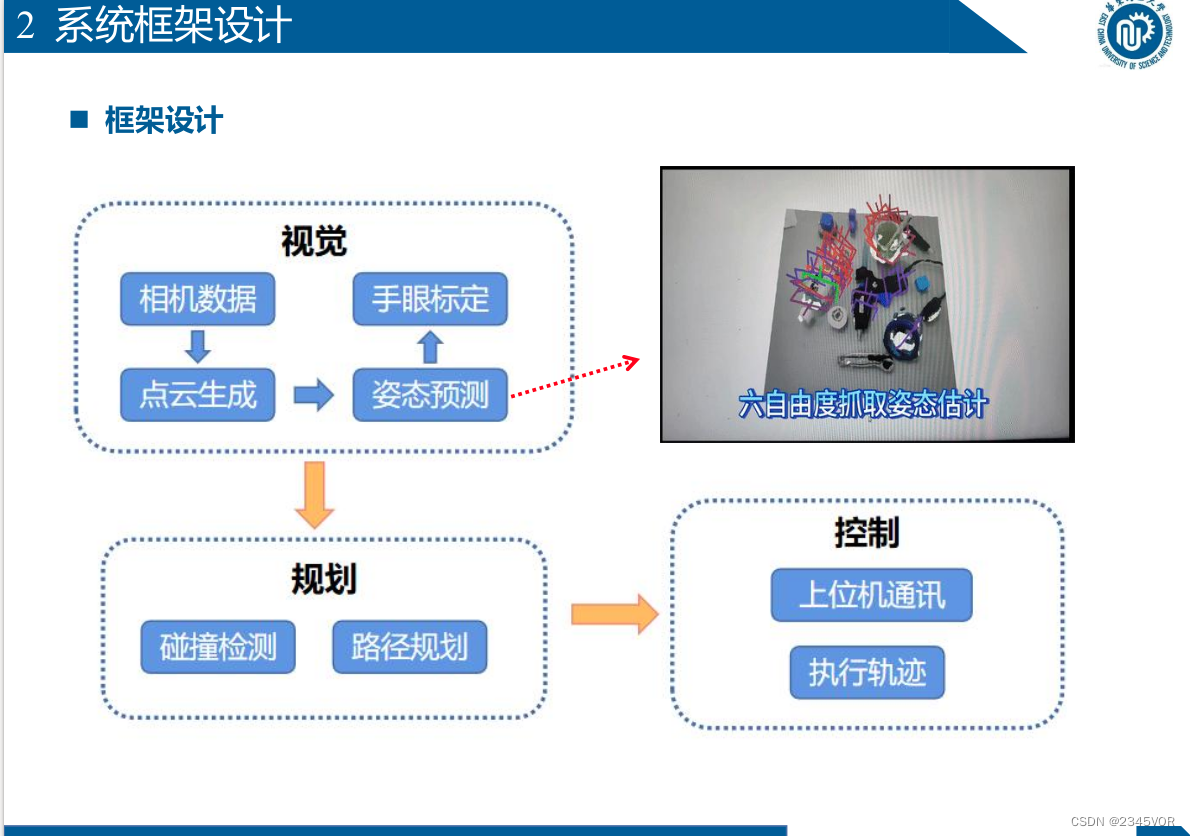
11. Conception du cadre du système
n Planification de mouvement
Ø Fonction : Arriver à
la position et à l'attitude spécifiées par l'algorithme
Ø Planification de trajectoire : Planifier une trajectoire sans collision de la
position actuelle à la position attendue n Étalonnage œil-main Ø Fonction : Obtenir la relation entre le système de coordonnées du robot et le système de coordonnées de la caméra Ø Effet : Actuellement disponible Atteindre une erreur de ± 5 mm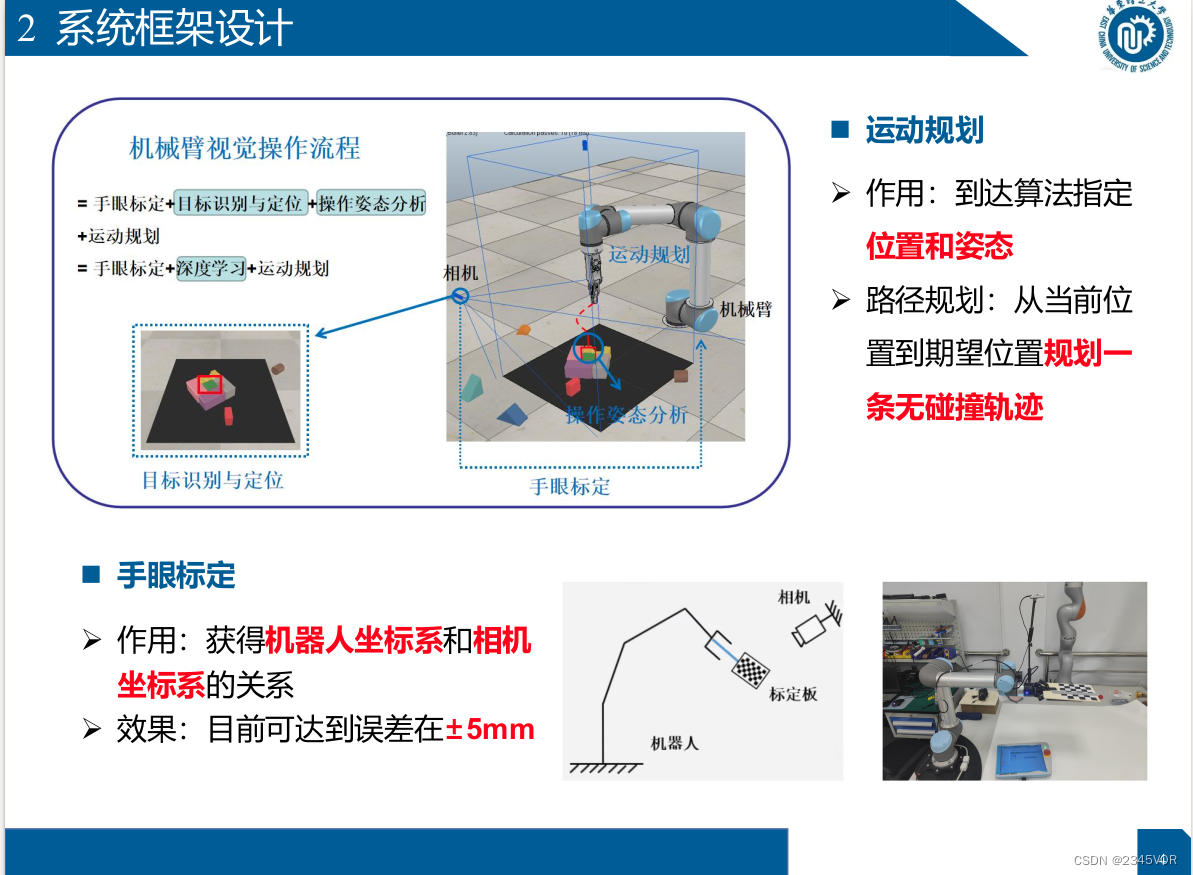
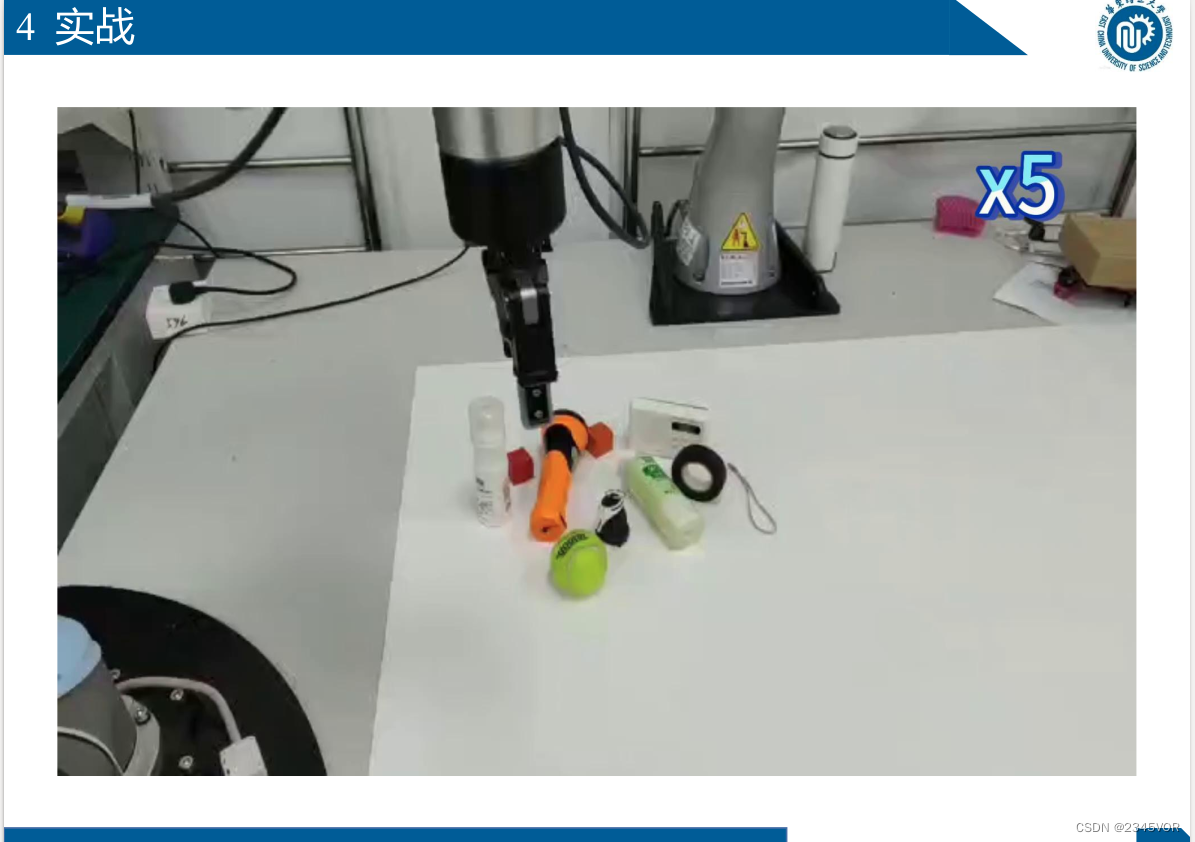
11. 3 Expérience de ramper
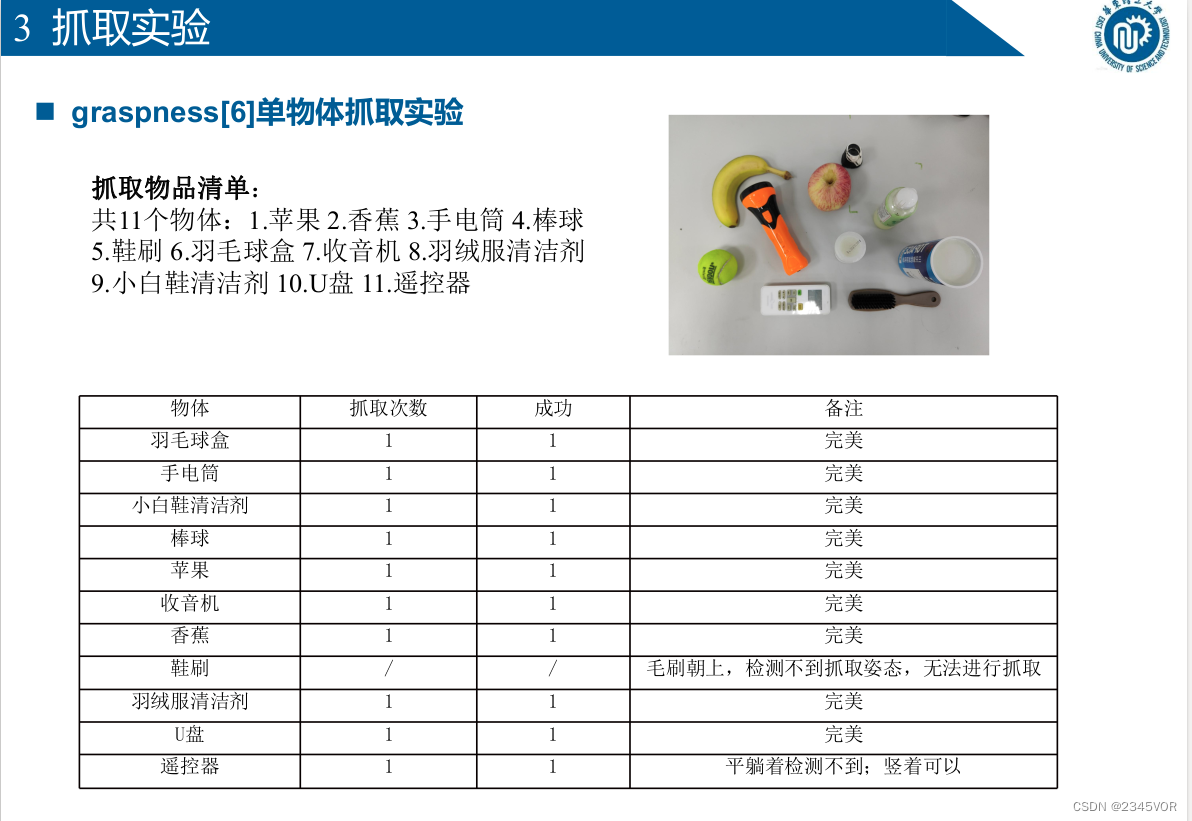
n préhension[6] Expérience de préhension d'objet unique
Liste des objets saisis :
11 objets au total : 1. Pomme 2. Banane 3. Lampe de poche 4. Baseball 5. Brosse à chaussures 6.
Boîte de badminton 7. Radio 8. Nettoyant pour doudoune
9. Petit nettoyeur de chaussures blanc 10. Disque U 11. Télécommande
11.3 Expérience d'exploration
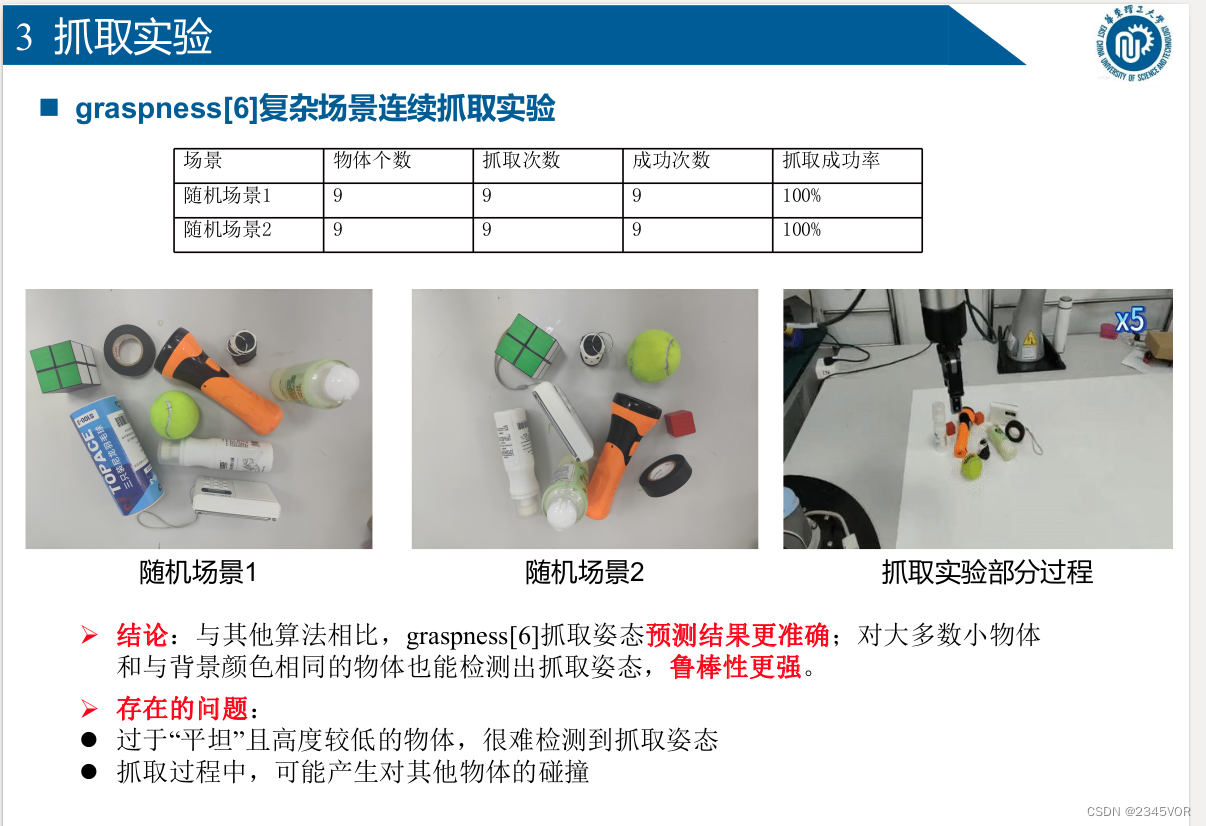
n Graspness[6] expérience de préhension continue de scène complexe
Ø Conclusion : par rapport à d'autres algorithmes, les résultats de prédiction de pose de préhension de préhension[6] sont plus précis ;
la préhension peut également être détectée pour la plupart des petits objets et des objets de la même couleur que l'arrière-plan Attitude , la robustesse est plus forte.
Ø Problèmes existants :
l Les objets trop "plats" et de faible hauteur rendent difficile la détection de la posture de préhension
l Pendant le processus de préhension, des collisions avec d'autres objets peuvent se produire