Das Prinzip und die Anwendung des ORB-Algorithmus zur Opencv-Feature-Erkennung
- Features sind eine weitere digitale Darstellung von Bildinformationen. Ein guter Satz an Funktionen
ist entscheidend für die endgültige Leistung bei einer bestimmten Aufgabe. - Das Hauptproblem bei der visuellen Odometrie (VO) besteht darin, die Kamerabewegung anhand von Bildmerkmalen abzuschätzen. Die Berechnung und Analyse des gesamten Bildes ist jedoch normalerweise zeitaufwändig und wird daher konvertiert, um die Bewegung von Merkmalspunkten im Bild zu analysieren.
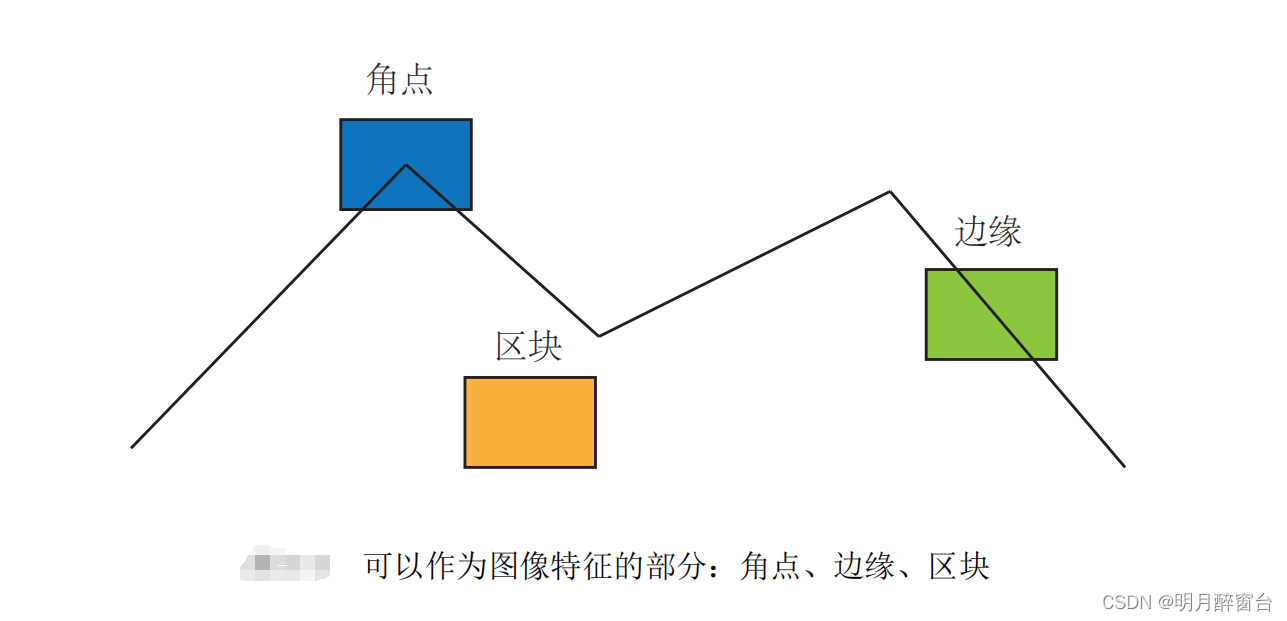
- Forscher im Bereich Computer Vision haben in jahrelanger Forschung viele weitere stabile lokale Bildmerkmale entworfen, wie zum Beispiel das berühmte SIFT, SURF, ORB und so weiter. Im Vergleich zu einfachen Eckpunkten können diese künstlich gestalteten Merkmalspunkte die folgenden Eigenschaften haben:
- Wiederholbarkeit: Die gleiche „Region“ kann in verschiedenen Bildern gefunden werden.
- Unterscheidungskraft: Unterschiedliche „Regionen“ haben unterschiedliche Ausdrücke.
- Effizienz: Im selben Bild sollte die Anzahl der Merkmalspunkte viel kleiner sein als die Anzahl der Pixel.
- Lokalität: Features sind nur einem kleinen Bildbereich zugeordnet.
- Feature-Punkte bestehen aus zwei Teilen: Schlüsselpunkt und Deskriptor. Wenn wir beispielsweise über SIFT-Funktionen sprechen, meinen wir zwei Dinge: „SIFT-Schlüsselpunkte extrahieren und SIFT-Deskriptoren berechnen“. Der Schlüsselpunkt bezieht sich auf die Position des Merkmalspunkts im Bild, und einige Merkmalspunkte enthalten auch Informationen wie Ausrichtung und Größe. Der Deskriptor ist normalerweise ein Vektor, der die Informationen der Pixel um den Schlüsselpunkt auf künstlich gestaltete Weise beschreibt. Die Deskriptoren sind nach dem Grundsatz konzipiert, dass „Merkmale mit ähnlichem Aussehen ähnliche Deskriptoren haben sollten“. Solange die Deskriptoren zweier Merkmalspunkte im Vektorraum ähnliche Abstände haben, können sie daher als derselbe Merkmalspunkt betrachtet werden.
- Das Prinzip des ORB-Algorithmus (Schlüsselpunkte + Merkmalsdeskriptoren) wird im Folgenden ausführlich beschrieben.
1. Einführung in ORB
- ORB-Papier: https://www.gwylab.com/download/ORB_2012.pdf
- In der Vergangenheit haben Forscher viele Bildmerkmale vorgeschlagen. Einige von ihnen sind genau und stellen bei Kamerabewegungen und Beleuchtungsänderungen ähnliche Darstellungen dar, sind jedoch entsprechend rechenintensiv. Unter diesen ist SIFT (Scale Invariant Feature Transform) zweifellos der Klassiker. Es berücksichtigt vollständig die Änderungen der Beleuchtung, des Maßstabs, der Drehung usw., die während des Bildtransformationsprozesses auftreten, ist jedoch mit einem enormen Rechenaufwand verbunden. Da die Extraktion und der Abgleich von Bildmerkmalen nur einer von vielen Gliedern im gesamten SLAM-Prozess ist, war die CPU eines gewöhnlichen PCs bisher (2016) nicht in der Lage, SIFT-Merkmale zur Positionierung und Kartierung in Echtzeit zu berechnen. Daher verwenden wir diese „Luxus“-Bildfunktion in SLAM selten.
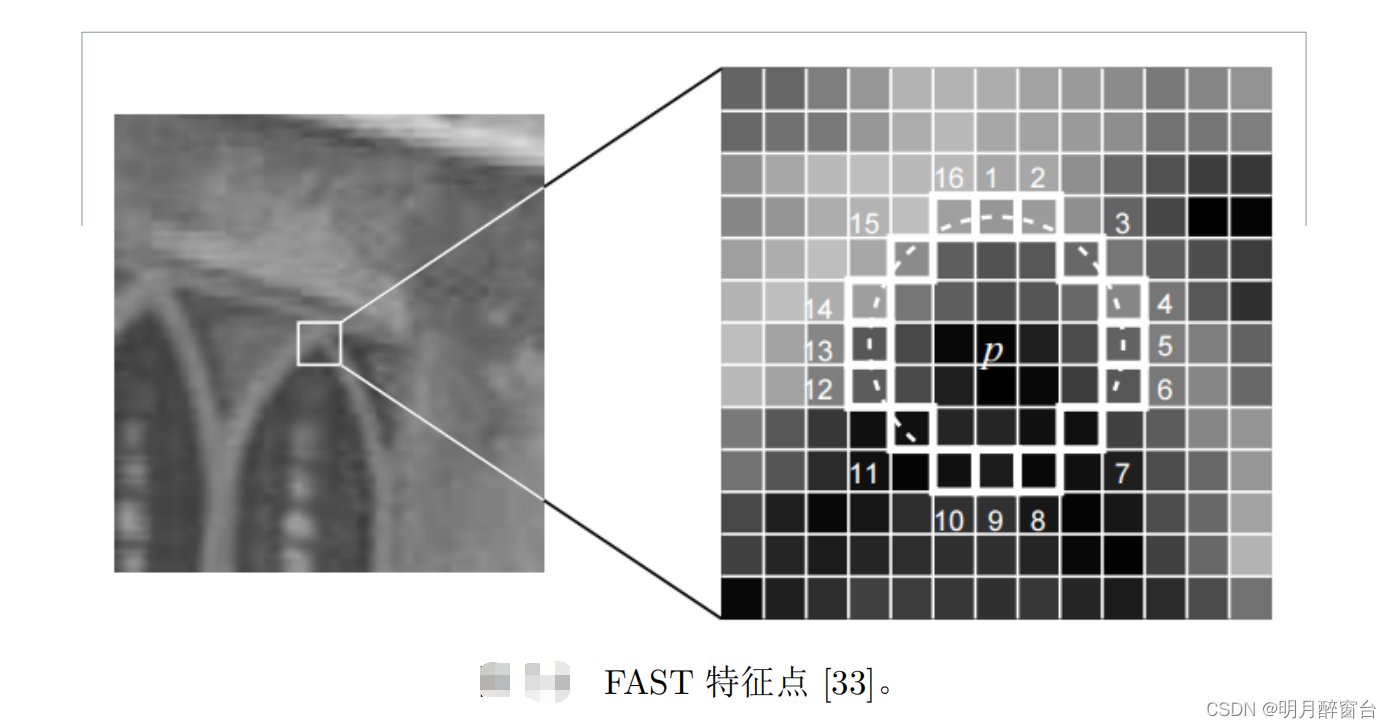
- Erwägen Sie bei anderen Funktionen eine entsprechende Reduzierung der Genauigkeit und Robustheit, um die Berechnungsgeschwindigkeit zu erhöhen. Beispielsweise ist der FAST-Schlüsselpunkt eine Art Feature-Punkt, der besonders schnell berechnet wird (beachten Sie hier das Wort „Schlüsselpunkt“, das darauf hinweist, dass es keinen Deskriptor gibt). Die ORB-Funktion (Oriented FAST and Rotated BRIEF) ist derzeit eine sehr repräsentative Echtzeitbildfunktion. Es verbessert das Problem, dass der FAST-Detektor [33] keine Direktionalität hat, und verwendet den extrem schnellen binären Deskriptor BRIEF, der den gesamten Bildmerkmalsextraktionsprozess erheblich beschleunigt. Laut dem Test des Autors in diesem Artikel benötigt ORB beim gleichzeitigen Extrahieren von etwa 1000 Merkmalspunkten im selben Bild etwa 15,3 ms, SURF etwa 217,3 ms und SIFT etwa 5228,7 ms. Daraus ist ersichtlich, dass ORB zwar die Rotations- und Skaleninvarianz des Features beibehält, die Geschwindigkeit jedoch deutlich verbessert wird und eine gute Wahl für SLAM mit hohen Echtzeitanforderungen ist. Die meisten Feature-Extraktionen weisen eine gute Parallelität auf und können durch Geräte wie GPUs beschleunigt werden. Nach der GPU-Beschleunigung kann SIFT die Anforderungen an die Echtzeitberechnung erfüllen. Allerdings wird die Einführung der GPU die Kosten des gesamten SLAM erhöhen. Ob die dadurch erzielte Leistungsverbesserung ausreicht, um die gezahlten Rechenkosten auszugleichen, muss vom Systementwickler sorgfältig abgewogen werden. Im aktuellen SLAM-Schema stellt ORB einen besseren Kompromiss zwischen Qualität und Leistung dar, daher verwenden wir ORB als Stellvertreter, um den gesamten Prozess der Merkmalsextraktion vorzustellen.
2. ORB-Prinzip

\quad\quadORB-Funktionen bestehen ebenfalls aus Schlüsselpunkten und Deskriptoren. Sein Schlüsselpunkt heißt „OrientedFAST“ und ist ein verbesserter FAST-Eckpunkt. Was ein FAST-Eckpunkt ist, wird im Folgenden vorgestellt. Sein Deskriptor heißt BRIEF (BinaryRobustIndependentElementaryFeatures). Daher ist das Extrahieren von ORB-Features in zwei Schritte unterteilt:
- SCHNELLE Eckpunktextraktion: Finden Sie die „Eckpunkte“ im Bild. Im Vergleich zur Originalversion von FAST berechnet ORB
die Hauptrichtung von Merkmalspunkten und fügt dem nachfolgenden BRIEF-Deskriptor das rotationsinvariante Merkmal hinzu. - KURZER Deskriptor: Beschreiben Sie den umgebenden Bildbereich, in dem die Merkmalspunkte im vorherigen Schritt extrahiert wurden.
Im Folgenden stellen wir FAST bzw. BRIEF vor.
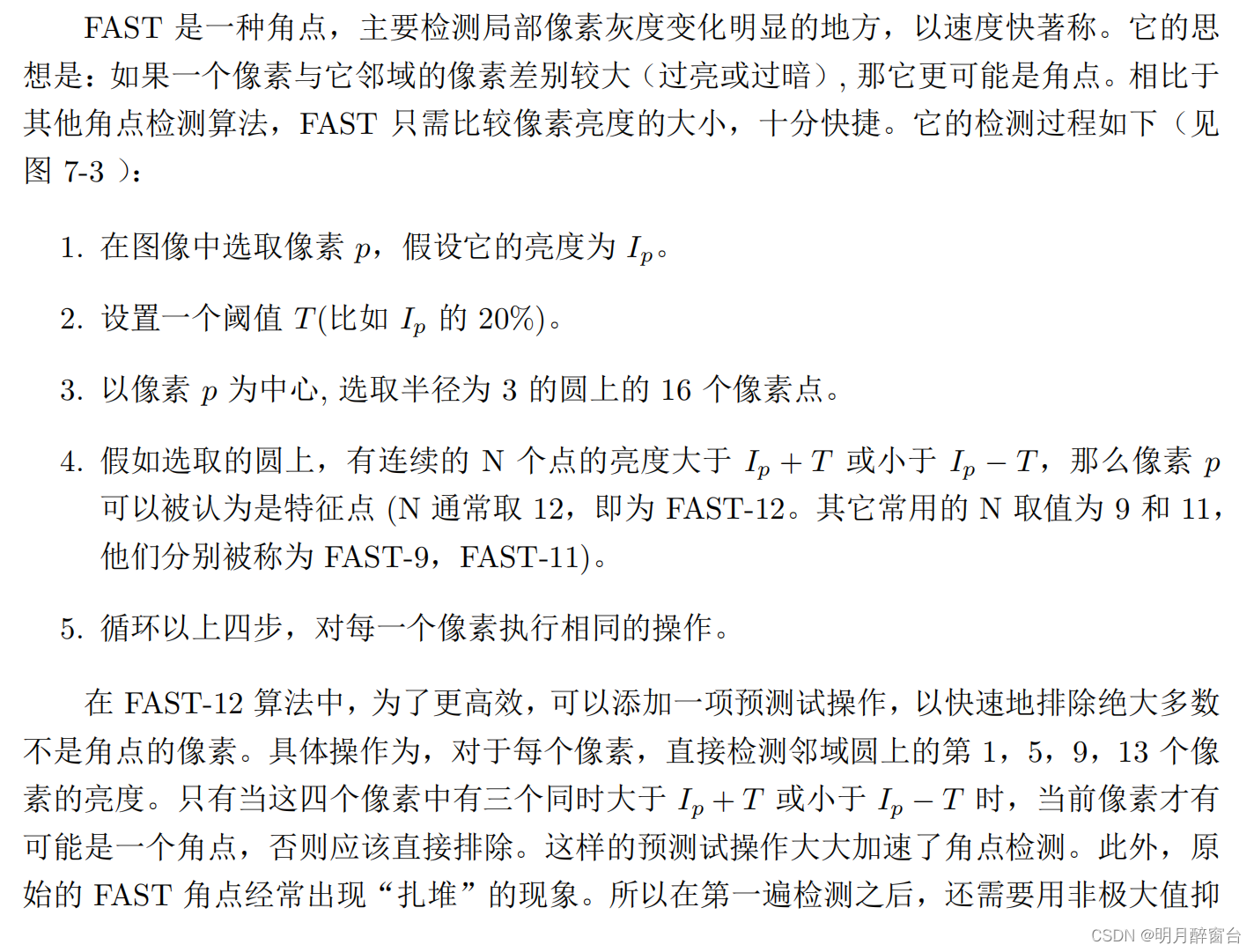
2.1 Kernpunkte von FAST
2.2 KURZE Beschreibung
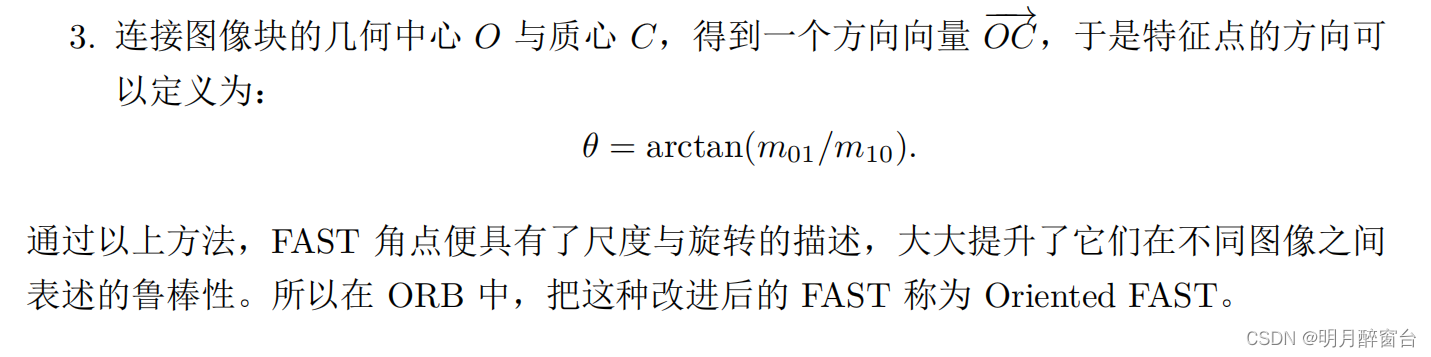
Nachdem wir die Oriented FAST-Schlüsselpunkte extrahiert haben, berechnen wir den Deskriptor für jeden Punkt. ORB verwendet eine modifizierte KURZE Funktionsbeschreibung. Lassen Sie uns zunächst darüber sprechen, was BRIEF ist.
- Implementierung:
- Ein besserer Blog: ORB-Algorithmus und OpenCV-Implementierung
2.3 Implementierung des ORB-Algorithmus
2.4 Opencv-Quellcode-Analyse
- Einführung in APIs
//ORB类定义:位置..\features2d.hpp
static Ptr<ORB> cv::ORB::create (
int nfeatures = 500, //需要的特征点总数;
float scaleFactor = 1.2f, //尺度因子;
int nlevels = 8, //金字塔层数;
int edgeThreshold = 31, //边界阈值;
int firstLevel = 0, //起始层;
int WTA_K = 2, //描述子形成方法,WTA_K=2表示,采用两两比较;
int scoreType = ORB::HARRIS_SCORE, //角点响应函数,可以选择Harris或者Fast的方法;
int patchSize = 31, //特征点邻域大小;
int fastThreshold = 20) //FAST阈值
- Quellcode:
- Die Definition der Header-Dateiklasse lautet wie folgt:
/*!
ORB implementation.
*/
class CV_EXPORTS_W ORB : public Feature2D
{
public:
// the size of the signature in bytes
enum {
kBytes = 32, HARRIS_SCORE=0, FAST_SCORE=1 };
CV_WRAP explicit ORB(int nfeatures = 500, float scaleFactor = 1.2f, int nlevels = 8, int edgeThreshold = 31,//构造函数
int firstLevel = 0, int WTA_K=2, int scoreType=ORB::HARRIS_SCORE, int patchSize=31 );
// returns the descriptor size in bytes
int descriptorSize() const; //描述子占用的字节数,默认32字节
// returns the descriptor type
int descriptorType() const;//描述子类型,8位整形数
// Compute the ORB features and descriptors on an image
void operator()(InputArray image, InputArray mask, vector<KeyPoint>& keypoints) const;
// Compute the ORB features and descriptors on an image
void operator()( InputArray image, InputArray mask, vector<KeyPoint>& keypoints, //提取特征点与形成描述子
OutputArray descriptors, bool useProvidedKeypoints=false ) const;
AlgorithmInfo* info() const;
protected:
void computeImpl( const Mat& image, vector<KeyPoint>& keypoints, Mat& descriptors ) const;//计算描述子
void detectImpl( const Mat& image, vector<KeyPoint>& keypoints, const Mat& mask=Mat() ) const;//检测特征点
CV_PROP_RW int nfeatures;//特征点总数
CV_PROP_RW double scaleFactor;//尺度因子
CV_PROP_RW int nlevels;//金字塔内层数
CV_PROP_RW int edgeThreshold;//边界阈值
CV_PROP_RW int firstLevel;//开始层数
CV_PROP_RW int WTA_K;//描述子形成方法,默认WTA_K=2,两两比较
CV_PROP_RW int scoreType;//角点响应函数
CV_PROP_RW int patchSize;//邻域Patch大小
};
- Merkmalsextraktion und Bildung von Deskriptoren: Verwenden Sie diese Funktion, um schnelle Merkmalspunkte zu extrahieren oder Merkmalsdeskriptoren für Bilder zu berechnen
_image:输入图像;
_mask:掩码图像;
_keypoints:输入角点;
_descriptors:如果为空,只寻找特征点,不计算特征描述子;
_useProvidedKeypoints:如果为true,函数只计算特征描述子;
/** Compute the ORB features and descriptors on an image
* @param img the image to compute the features and descriptors on
* @param mask the mask to apply
* @param keypoints the resulting keypoints
* @param descriptors the resulting descriptors
* @param do_keypoints if true, the keypoints are computed, otherwise used as an input
* @param do_descriptors if true, also computes the descriptors
*/
void ORB::operator()( InputArray _image, InputArray _mask, vector<KeyPoint>& _keypoints,
OutputArray _descriptors, bool useProvidedKeypoints) const
{
CV_Assert(patchSize >= 2);
bool do_keypoints = !useProvidedKeypoints;
bool do_descriptors = _descriptors.needed();
if( (!do_keypoints && !do_descriptors) || _image.empty() )
return;
//ROI handling
const int HARRIS_BLOCK_SIZE = 9;//Harris角点响应需要的边界大小
int halfPatchSize = patchSize / 2;.//邻域半径
int border = std::max(edgeThreshold, std::max(halfPatchSize, HARRIS_BLOCK_SIZE/2))+1;//采用最大的边界
Mat image = _image.getMat(), mask = _mask.getMat();
if( image.type() != CV_8UC1 )
cvtColor(_image, image, CV_BGR2GRAY);//转灰度图
int levelsNum = this->nlevels;//金字塔层数
if( !do_keypoints ) //不做特征点检测
{
// if we have pre-computed keypoints, they may use more levels than it is set in parameters
// !!!TODO!!! implement more correct method, independent from the used keypoint detector.
// Namely, the detector should provide correct size of each keypoint. Based on the keypoint size
// and the algorithm used (i.e. BRIEF, running on 31x31 patches) we should compute the approximate
// scale-factor that we need to apply. Then we should cluster all the computed scale-factors and
// for each cluster compute the corresponding image.
//
// In short, ultimately the descriptor should
// ignore octave parameter and deal only with the keypoint size.
levelsNum = 0;
for( size_t i = 0; i < _keypoints.size(); i++ )
levelsNum = std::max(levelsNum, std::max(_keypoints[i].octave, 0));//提取特征点的最大层数
levelsNum++;
}
// Pre-compute the scale pyramids
vector<Mat> imagePyramid(levelsNum), maskPyramid(levelsNum);//创建尺度金字塔图像
for (int level = 0; level < levelsNum; ++level)
{
float scale = 1/getScale(level, firstLevel, scaleFactor); //每层对应的尺度
/*
static inline float getScale(int level, int firstLevel, double scaleFactor)
{
return (float)std::pow(scaleFactor, (double)(level - firstLevel));
}
*/
Size sz(cvRound(image.cols*scale), cvRound(image.rows*scale));//每层对应的图像大小
Size wholeSize(sz.width + border*2, sz.height + border*2);
Mat temp(wholeSize, image.type()), masktemp;
imagePyramid[level] = temp(Rect(border, border, sz.width, sz.height));
if( !mask.empty() )
{
masktemp = Mat(wholeSize, mask.type());
maskPyramid[level] = masktemp(Rect(border, border, sz.width, sz.height));
}
// Compute the resized image
if( level != firstLevel ) //得到金字塔每层的图像
{
if( level < firstLevel )
{
resize(image, imagePyramid[level], sz, 0, 0, INTER_LINEAR);
if (!mask.empty())
resize(mask, maskPyramid[level], sz, 0, 0, INTER_LINEAR);
}
else
{
resize(imagePyramid[level-1], imagePyramid[level], sz, 0, 0, INTER_LINEAR);
if (!mask.empty())
{
resize(maskPyramid[level-1], maskPyramid[level], sz, 0, 0, INTER_LINEAR);
threshold(maskPyramid[level], maskPyramid[level], 254, 0, THRESH_TOZERO);
}
}
copyMakeBorder(imagePyramid[level], temp, border, border, border, border,//扩大图像的边界
BORDER_REFLECT_101+BORDER_ISOLATED);
if (!mask.empty())
copyMakeBorder(maskPyramid[level], masktemp, border, border, border, border,
BORDER_CONSTANT+BORDER_ISOLATED);
}
else
{
copyMakeBorder(image, temp, border, border, border, border,//扩大图像的四个边界
BORDER_REFLECT_101);
if( !mask.empty() )
copyMakeBorder(mask, masktemp, border, border, border, border,
BORDER_CONSTANT+BORDER_ISOLATED);
}
}
// Pre-compute the keypoints (we keep the best over all scales, so this has to be done beforehand
vector < vector<KeyPoint> > allKeypoints;
if( do_keypoints )//提取角点
{
// Get keypoints, those will be far enough from the border that no check will be required for the descriptor
computeKeyPoints(imagePyramid, maskPyramid, allKeypoints, //对每一层图像提取角点,见下面(1)的分析
nfeatures, firstLevel, scaleFactor,
edgeThreshold, patchSize, scoreType);
// make sure we have the right number of keypoints keypoints
/*vector<KeyPoint> temp;
for (int level = 0; level < n_levels; ++level)
{
vector<KeyPoint>& keypoints = all_keypoints[level];
temp.insert(temp.end(), keypoints.begin(), keypoints.end());
keypoints.clear();
}
KeyPoint::retainBest(temp, n_features_);
for (vector<KeyPoint>::iterator keypoint = temp.begin(),
keypoint_end = temp.end(); keypoint != keypoint_end; ++keypoint)
all_keypoints[keypoint->octave].push_back(*keypoint);*/
}
else //不提取角点
{
// Remove keypoints very close to the border
KeyPointsFilter::runByImageBorder(_keypoints, image.size(), edgeThreshold);
// Cluster the input keypoints depending on the level they were computed at
allKeypoints.resize(levelsNum);
for (vector<KeyPoint>::iterator keypoint = _keypoints.begin(),
keypointEnd = _keypoints.end(); keypoint != keypointEnd; ++keypoint)
allKeypoints[keypoint->octave].push_back(*keypoint); //把角点信息存入allKeypoints内
// Make sure we rescale the coordinates
for (int level = 0; level < levelsNum; ++level) //把角点位置信息缩放到指定层位置上
{
if (level == firstLevel)
continue;
vector<KeyPoint> & keypoints = allKeypoints[level];
float scale = 1/getScale(level, firstLevel, scaleFactor);
for (vector<KeyPoint>::iterator keypoint = keypoints.begin(),
keypointEnd = keypoints.end(); keypoint != keypointEnd; ++keypoint)
keypoint->pt *= scale; //缩放
}
}
Mat descriptors;
vector<Point> pattern;
if( do_descriptors ) //计算特征描述子
{
int nkeypoints = 0;
for (int level = 0; level < levelsNum; ++level)
nkeypoints += (int)allKeypoints[level].size();//得到所有层的角点总数
if( nkeypoints == 0 )
_descriptors.release();
else
{
_descriptors.create(nkeypoints, descriptorSize(), CV_8U);//创建一个矩阵存放描述子,每一行表示一个角点信息
descriptors = _descriptors.getMat();
}
const int npoints = 512;//取512个点,共256对,产生256维描述子,32个字节
Point patternbuf[npoints];
const Point* pattern0 = (const Point*)bit_pattern_31_;//训练好的256对数据点位置
if( patchSize != 31 )
{
pattern0 = patternbuf;
makeRandomPattern(patchSize, patternbuf, npoints);
}
CV_Assert( WTA_K == 2 || WTA_K == 3 || WTA_K == 4 );
if( WTA_K == 2 ) //WTA_K=2使用两个点之间作比较
std::copy(pattern0, pattern0 + npoints, std::back_inserter(pattern));
else
{
int ntuples = descriptorSize()*4;
initializeOrbPattern(pattern0, pattern, ntuples, WTA_K, npoints);
}
}
_keypoints.clear();
int offset = 0;
for (int level = 0; level < levelsNum; ++level)//依次计算每一层的角点描述子
{
// Get the features and compute their orientation
vector<KeyPoint>& keypoints = allKeypoints[level];
int nkeypoints = (int)keypoints.size();//本层内角点个数
// Compute the descriptors
if (do_descriptors)
{
Mat desc;
if (!descriptors.empty())
{
desc = descriptors.rowRange(offset, offset + nkeypoints);
}
offset += nkeypoints; //偏移量
// preprocess the resized image
Mat& workingMat = imagePyramid[level];
//boxFilter(working_mat, working_mat, working_mat.depth(), Size(5,5), Point(-1,-1), true, BORDER_REFLECT_101);
GaussianBlur(workingMat, workingMat, Size(7, 7), 2, 2, BORDER_REFLECT_101);//高斯平滑图像
computeDescriptors(workingMat, keypoints, desc, pattern, descriptorSize(), WTA_K);//计算本层内角点的描述子,(3)
}
// Copy to the output data
if (level != firstLevel) //角点位置信息返回到原图上
{
float scale = getScale(level, firstLevel, scaleFactor);
for (vector<KeyPoint>::iterator keypoint = keypoints.begin(),
keypointEnd = keypoints.end(); keypoint != keypointEnd; ++keypoint)
keypoint->pt *= scale;
}
// And add the keypoints to the output
_keypoints.insert(_keypoints.end(), keypoints.begin(), keypoints.end());//存入描述子信息,返回
}
}
2.4.1 Eckpunkte extrahieren
imagePyramid: die konstruierte Pyramide
/** Compute the ORB keypoints on an image
* @param image_pyramid the image pyramid to compute the features and descriptors on
* @param mask_pyramid the masks to apply at every level
* @param keypoints the resulting keypoints, clustered per level
*/
static void computeKeyPoints(const vector<Mat>& imagePyramid,
const vector<Mat>& maskPyramid,
vector<vector<KeyPoint> >& allKeypoints,
int nfeatures, int firstLevel, double scaleFactor,
int edgeThreshold, int patchSize, int scoreType )
{
int nlevels = (int)imagePyramid.size(); //金字塔层数
vector<int> nfeaturesPerLevel(nlevels);
// fill the extractors and descriptors for the corresponding scales
float factor = (float)(1.0 / scaleFactor);
float ndesiredFeaturesPerScale = nfeatures*(1 - factor)/(1 - (float)pow((double)factor, (double)nlevels));//
int sumFeatures = 0;
for( int level = 0; level < nlevels-1; level++ ) //对每层图像上分配相应角点数
{
nfeaturesPerLevel[level] = cvRound(ndesiredFeaturesPerScale);
sumFeatures += nfeaturesPerLevel[level];
ndesiredFeaturesPerScale *= factor;
}
nfeaturesPerLevel[nlevels-1] = std::max(nfeatures - sumFeatures, 0);//剩下角点数,由最上层图像提取
// Make sure we forget about what is too close to the boundary
//edge_threshold_ = std::max(edge_threshold_, patch_size_/2 + kKernelWidth / 2 + 2);
// pre-compute the end of a row in a circular patch
int halfPatchSize = patchSize / 2; //计算每个特征点圆邻域的位置信息
vector<int> umax(halfPatchSize + 2);
int v, v0, vmax = cvFloor(halfPatchSize * sqrt(2.f) / 2 + 1);
int vmin = cvCeil(halfPatchSize * sqrt(2.f) / 2);
for (v = 0; v <= vmax; ++v) //
umax[v] = cvRound(sqrt((double)halfPatchSize * halfPatchSize - v * v));
// Make sure we are symmetric
for (v = halfPatchSize, v0 = 0; v >= vmin; --v)
{
while (umax[v0] == umax[v0 + 1])
++v0;
umax[v] = v0;
++v0;
}
allKeypoints.resize(nlevels);
for (int level = 0; level < nlevels; ++level)
{
int featuresNum = nfeaturesPerLevel[level];
allKeypoints[level].reserve(featuresNum*2);
vector<KeyPoint> & keypoints = allKeypoints[level];
// Detect FAST features, 20 is a good threshold
FastFeatureDetector fd(20, true);
fd.detect(imagePyramid[level], keypoints, maskPyramid[level]);//Fast角点检测
// Remove keypoints very close to the border
KeyPointsFilter::runByImageBorder(keypoints, imagePyramid[level].size(), edgeThreshold);//去除邻近边界的点
if( scoreType == ORB::HARRIS_SCORE )
{
// Keep more points than necessary as FAST does not give amazing corners
KeyPointsFilter::retainBest(keypoints, 2 * featuresNum);//按Fast强度排序,保留前2*featuresNum个特征点
// Compute the Harris cornerness (better scoring than FAST)
HarrisResponses(imagePyramid[level], keypoints, 7, HARRIS_K); //计算每个角点的Harris强度响应
}
//cull to the final desired level, using the new Harris scores or the original FAST scores.
KeyPointsFilter::retainBest(keypoints, featuresNum);//按Harris强度排序,保留前featuresNum个
float sf = getScale(level, firstLevel, scaleFactor);
// Set the level of the coordinates
for (vector<KeyPoint>::iterator keypoint = keypoints.begin(),
keypointEnd = keypoints.end(); keypoint != keypointEnd; ++keypoint)
{
keypoint->octave = level; //层信息
keypoint->size = patchSize*sf; //
}
computeOrientation(imagePyramid[level], keypoints, halfPatchSize, umax); //计算角点的方向,(2)分析
}
}
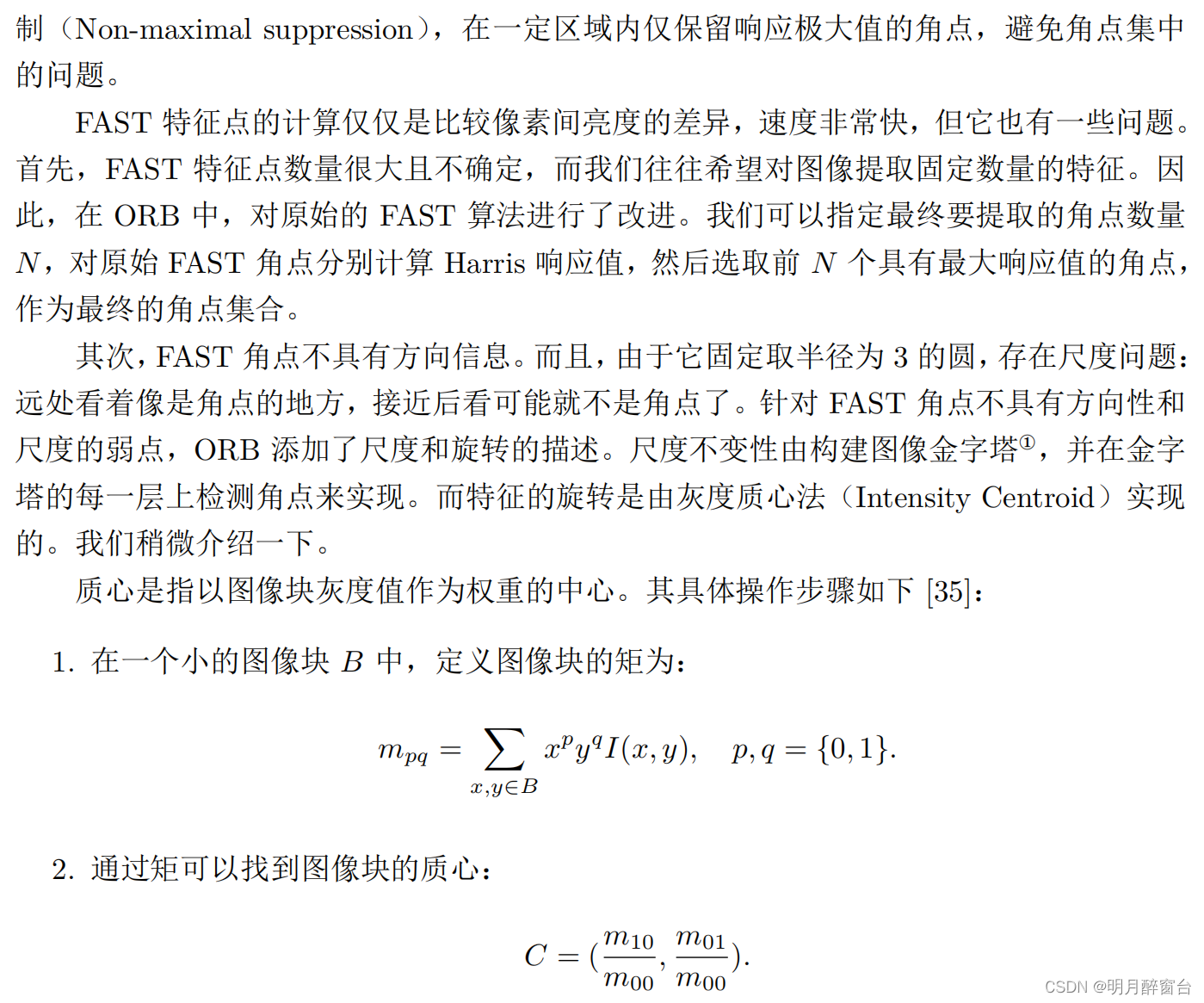
2.4.2 Schwerpunktmethode zur Berechnung der Hauptrichtung des Eckpunkts
static void computeOrientation(const Mat& image, vector<KeyPoint>& keypoints,
int halfPatchSize, const vector<int>& umax)
{
// Process each keypoint
for (vector<KeyPoint>::iterator keypoint = keypoints.begin(), //为每个角点计算主方向
keypointEnd = keypoints.end(); keypoint != keypointEnd; ++keypoint)
{
keypoint->angle = IC_Angle(image, halfPatchSize, keypoint->pt, umax);//计算质心方向
}
}
static float IC_Angle(const Mat& image, const int half_k, Point2f pt,
const vector<int> & u_max)
{
int m_01 = 0, m_10 = 0;
const uchar* center = &image.at<uchar> (cvRound(pt.y), cvRound(pt.x));
// Treat the center line differently, v=0
for (int u = -half_k; u <= half_k; ++u)
m_10 += u * center[u];
// Go line by line in the circular patch
int step = (int)image.step1();
for (int v = 1; v <= half_k; ++v) //每次处理对称的两行v
{
// Proceed over the two lines
int v_sum = 0;
int d = u_max[v];
for (int u = -d; u <= d; ++u)
{
int val_plus = center[u + v*step], val_minus = center[u - v*step];
v_sum += (val_plus - val_minus); //计算m_01时,位置上差一个符号
m_10 += u * (val_plus + val_minus);
}
m_01 += v * v_sum;//计算上下两行的m_01
}
return fastAtan2((float)m_01, (float)m_10);//计算角度
}
2.4.3 Berechnung von Feature-Point-Deskriptoren
static void computeDescriptors(const Mat& image, vector<KeyPoint>& keypoints, Mat& descriptors,
const vector<Point>& pattern, int dsize, int WTA_K)
{
//convert to grayscale if more than one color
CV_Assert(image.type() == CV_8UC1);
//create the descriptor mat, keypoints.size() rows, BYTES cols
descriptors = Mat::zeros((int)keypoints.size(), dsize, CV_8UC1);
for (size_t i = 0; i < keypoints.size(); i++)
computeOrbDescriptor(keypoints[i], image, &pattern[0], descriptors.ptr((int)i), dsize, WTA_K);
}
static void computeOrbDescriptor(const KeyPoint& kpt,
const Mat& img, const Point* pattern,
uchar* desc, int dsize, int WTA_K)
{
float angle = kpt.angle;
//angle = cvFloor(angle/12)*12.f;
angle *= (float)(CV_PI/180.f);
float a = (float)cos(angle), b = (float)sin(angle);
const uchar* center = &img.at<uchar>(cvRound(kpt.pt.y), cvRound(kpt.pt.x));
int step = (int)img.step;
#if 1
#define GET_VALUE(idx) \ //取旋转后一个像素点的值
center[cvRound(pattern[idx].x*b + pattern[idx].y*a)*step + \
cvRound(pattern[idx].x*a - pattern[idx].y*b)]
#else
float x, y;
int ix, iy;
#define GET_VALUE(idx) \ //取旋转后一个像素点,插值法
(x = pattern[idx].x*a - pattern[idx].y*b, \
y = pattern[idx].x*b + pattern[idx].y*a, \
ix = cvFloor(x), iy = cvFloor(y), \
x -= ix, y -= iy, \
cvRound(center[iy*step + ix]*(1-x)*(1-y) + center[(iy+1)*step + ix]*(1-x)*y + \
center[iy*step + ix+1]*x*(1-y) + center[(iy+1)*step + ix+1]*x*y))
#endif
if( WTA_K == 2 )
{
for (int i = 0; i < dsize; ++i, pattern += 16)//每个特征描述子长度为32个字节
{
int t0, t1, val;
t0 = GET_VALUE(0); t1 = GET_VALUE(1);
val = t0 < t1;
t0 = GET_VALUE(2); t1 = GET_VALUE(3);
val |= (t0 < t1) << 1;
t0 = GET_VALUE(4); t1 = GET_VALUE(5);
val |= (t0 < t1) << 2;
t0 = GET_VALUE(6); t1 = GET_VALUE(7);
val |= (t0 < t1) << 3;
t0 = GET_VALUE(8); t1 = GET_VALUE(9);
val |= (t0 < t1) << 4;
t0 = GET_VALUE(10); t1 = GET_VALUE(11);
val |= (t0 < t1) << 5;
t0 = GET_VALUE(12); t1 = GET_VALUE(13);
val |= (t0 < t1) << 6;
t0 = GET_VALUE(14); t1 = GET_VALUE(15);
val |= (t0 < t1) << 7;
desc[i] = (uchar)val;
}
}
else if( WTA_K == 3 )
{
for (int i = 0; i < dsize; ++i, pattern += 12)
{
int t0, t1, t2, val;
t0 = GET_VALUE(0); t1 = GET_VALUE(1); t2 = GET_VALUE(2);
val = t2 > t1 ? (t2 > t0 ? 2 : 0) : (t1 > t0);
t0 = GET_VALUE(3); t1 = GET_VALUE(4); t2 = GET_VALUE(5);
val |= (t2 > t1 ? (t2 > t0 ? 2 : 0) : (t1 > t0)) << 2;
t0 = GET_VALUE(6); t1 = GET_VALUE(7); t2 = GET_VALUE(8);
val |= (t2 > t1 ? (t2 > t0 ? 2 : 0) : (t1 > t0)) << 4;
t0 = GET_VALUE(9); t1 = GET_VALUE(10); t2 = GET_VALUE(11);
val |= (t2 > t1 ? (t2 > t0 ? 2 : 0) : (t1 > t0)) << 6;
desc[i] = (uchar)val;
}
}
else if( WTA_K == 4 )
{
for (int i = 0; i < dsize; ++i, pattern += 16)
{
int t0, t1, t2, t3, u, v, k, val;
t0 = GET_VALUE(0); t1 = GET_VALUE(1);
t2 = GET_VALUE(2); t3 = GET_VALUE(3);
u = 0, v = 2;
if( t1 > t0 ) t0 = t1, u = 1;
if( t3 > t2 ) t2 = t3, v = 3;
k = t0 > t2 ? u : v;
val = k;
t0 = GET_VALUE(4); t1 = GET_VALUE(5);
t2 = GET_VALUE(6); t3 = GET_VALUE(7);
u = 0, v = 2;
if( t1 > t0 ) t0 = t1, u = 1;
if( t3 > t2 ) t2 = t3, v = 3;
k = t0 > t2 ? u : v;
val |= k << 2;
t0 = GET_VALUE(8); t1 = GET_VALUE(9);
t2 = GET_VALUE(10); t3 = GET_VALUE(11);
u = 0, v = 2;
if( t1 > t0 ) t0 = t1, u = 1;
if( t3 > t2 ) t2 = t3, v = 3;
k = t0 > t2 ? u : v;
val |= k << 4;
t0 = GET_VALUE(12); t1 = GET_VALUE(13);
t2 = GET_VALUE(14); t3 = GET_VALUE(15);
u = 0, v = 2;
if( t1 > t0 ) t0 = t1, u = 1;
if( t3 > t2 ) t2 = t3, v = 3;
k = t0 > t2 ? u : v;
val |= k << 6;
desc[i] = (uchar)val;
}
}
else
CV_Error( CV_StsBadSize, "Wrong WTA_K. It can be only 2, 3 or 4." );
#undef GET_VALUE
}
3. ORB-Funktionsabgleich
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
int main ( int argc, char** argv )
{
if ( argc != 3 )
{
cout<<"usage: feature_extraction img1 img2"<<endl;
return 1;
}
//-- 读取图像
Mat img_1 = imread ( argv[1], CV_LOAD_IMAGE_COLOR );
Mat img_2 = imread ( argv[2], CV_LOAD_IMAGE_COLOR );
//-- 初始化
std::vector<KeyPoint> keypoints_1, keypoints_2;
Mat descriptors_1, descriptors_2;
Ptr<ORB> orb = ORB::create ( 500, 1.2f, 8, 31, 0, 2, ORB::HARRIS_SCORE,31,20 );
//-- 第一步: 检测 Oriented FAST 角点位置
orb->detect ( img_1,keypoints_1 );
orb->detect ( img_2,keypoints_2 );
//-- 第二步: 根据角点位置计算 BRIEF 描述子
orb->compute ( img_1, keypoints_1, descriptors_1 );
orb->compute ( img_2, keypoints_2, descriptors_2 );
Mat outimg1;
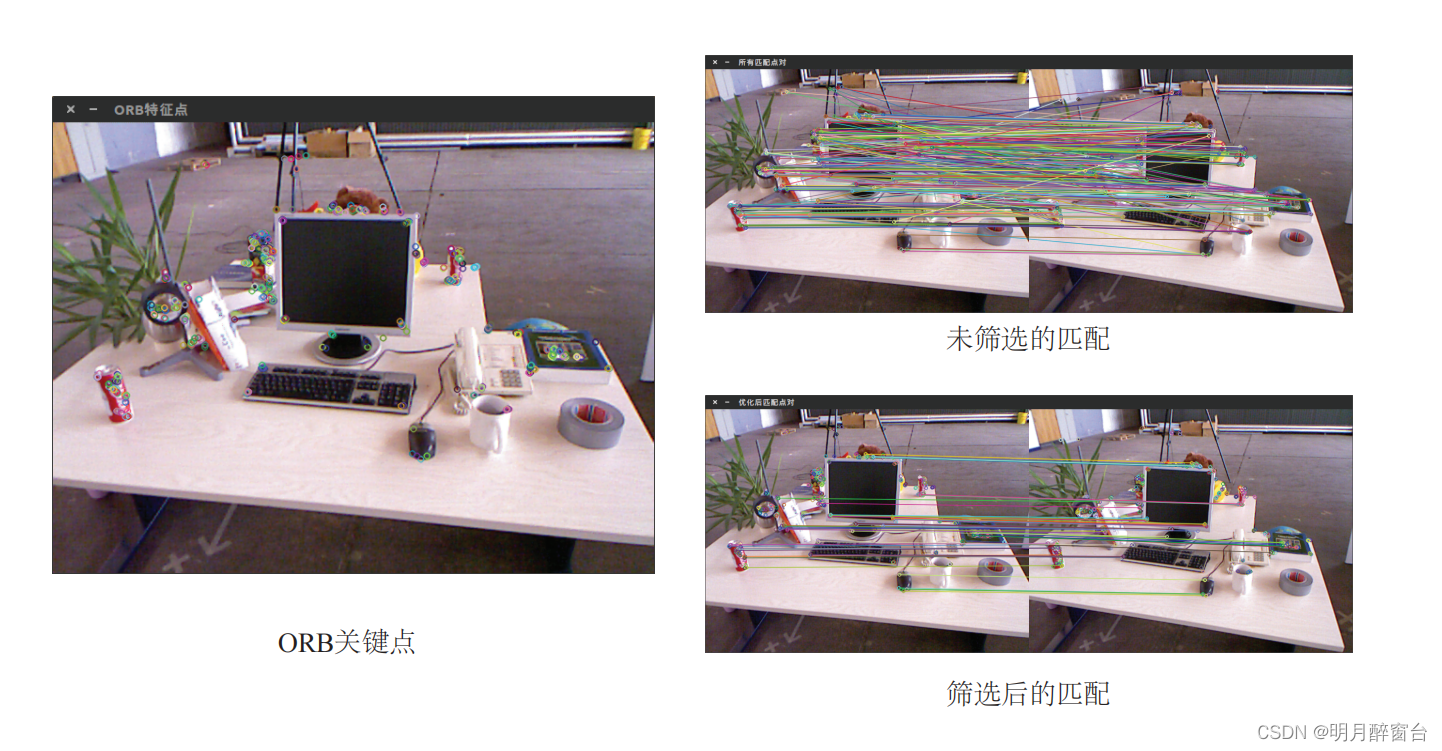
drawKeypoints( img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
imshow("ORB特征点",outimg1);
//-- 第三步: 对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> matches;
BFMatcher matcher ( NORM_HAMMING );
matcher.match ( descriptors_1, descriptors_2, matches );
//-- 第四步:匹配点对筛选
double min_dist=10000, max_dist=0;
// 找出所有匹配之间的最小距离和最大距离,即是最相似的和最不相似的两组点之间的距离
for ( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = matches[i].distance;
if ( dist < min_dist ) min_dist = dist;
if ( dist > max_dist ) max_dist = dist;
}
printf ( "-- Max dist : %f \n", max_dist );
printf ( "-- Min dist : %f \n", min_dist );
// 当描述子之间的距离大于两倍的最小距离时,即认为匹配有误。
// 但有时候最小距离会非常小,设置一个经验值作为下限。
std::vector< DMatch > good_matches;
for ( int i = 0; i < descriptors_1.rows; i++ )
{
if ( matches[i].distance <= max ( 2*min_dist, 30.0 ) )
{
good_matches.push_back ( matches[i] );
}
}
//-- 第五步: 绘制匹配结果
Mat img_match;
Mat img_goodmatch;
drawMatches ( img_1, keypoints_1, img_2, keypoints_2, matches, img_match );
drawMatches ( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch );
imshow ( "所有匹配点对", img_match );
imshow ( "优化后匹配点对", img_goodmatch );
waitKey(0);
return 0;
}
- Nachverfolgen:
Referenz:
1. ORB-Prinzip und Opencv-Quellcode-Analyse
2. ORBSLAM2-Lernen (1): Prinzip des ORB-Algorithmus