コーナー検出
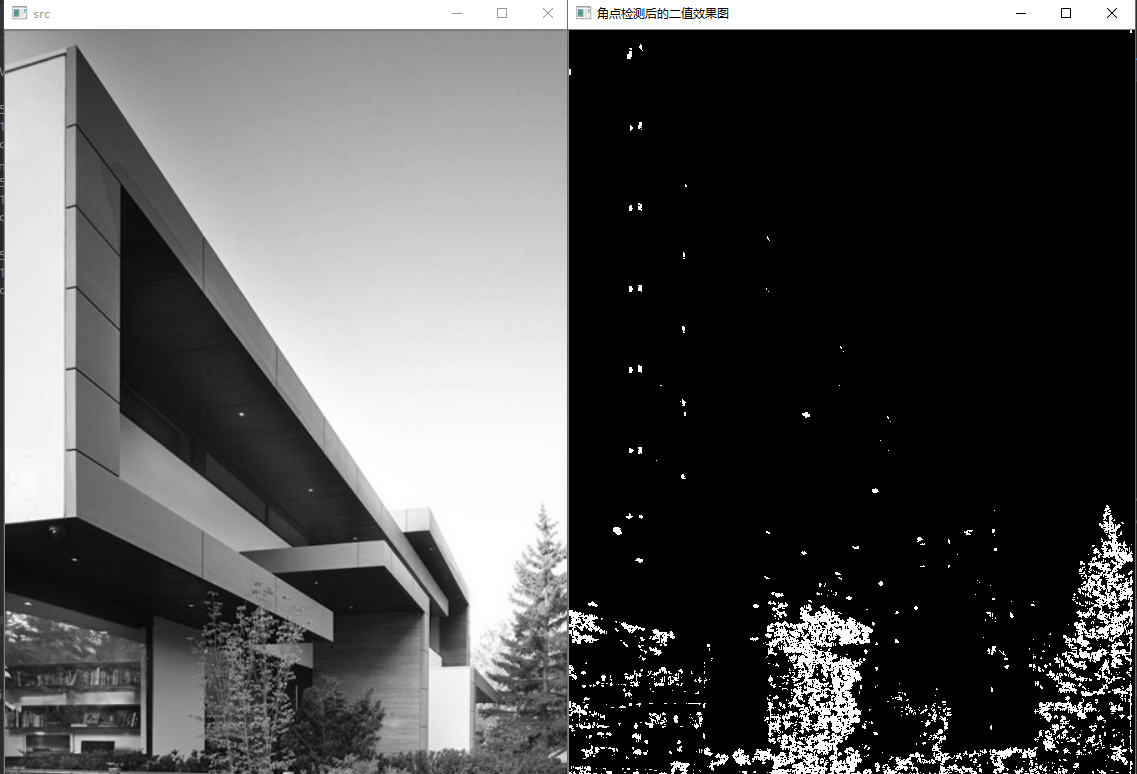
焦点検出1.harris
空cornerHarris (InputArray SRC、OutputArray DST、int型のblockSize、int型ksize、ダブルK、intborderType = BORDER_DEFAULT)

1 マットSRC =(IMREAD " E:/house.png "、0 ); 2つの マットハリス、harris_bin; 。3 cornerHarris(SRC、ハリス、2、3、0.01 ); 4 閾値(ハリス、harris_bin、0.00001、255 、THRESH_BINARY ) 。5 関数imshow(" SRC " 、SRC) 。6 関数imshow(" コーナー点がバイナリレンダリングを検出する" 、harris_bin) 。7 waitKey()。
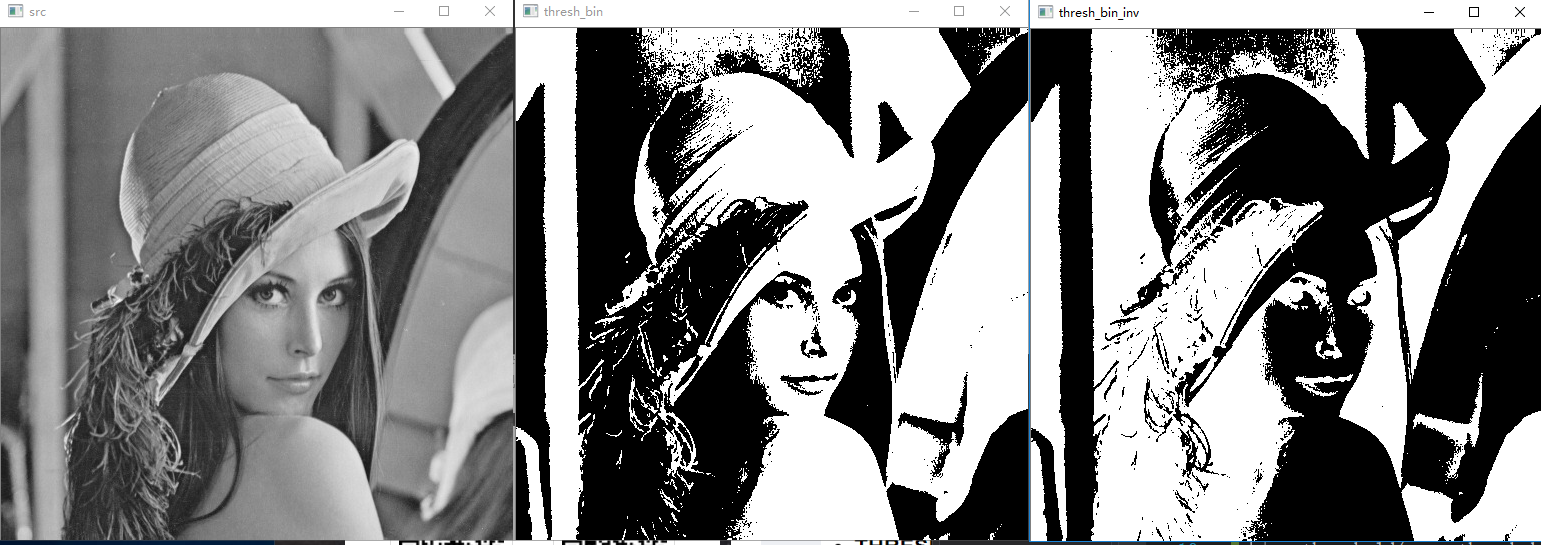
2.閾値(二値画像を生成するための)
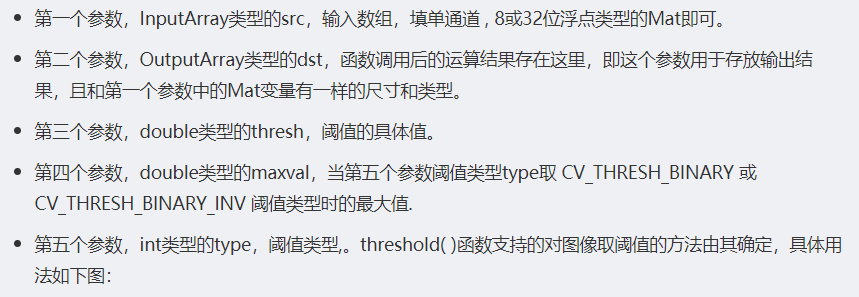
double threshold(InputArray src,OutputArray dst, double thresh, double maxval, int type)

1 #include<opencv.hpp> 2 #include<vector> 3 using namespace std; 4 using namespace cv; 5 int main() 6 { 7 Mat src = imread("E:/test.jpg",0); 8 imshow("src", src); 9 Mat thresh_bin; 10 threshold(src, thresh_bin, 127, 255, THRESH_BINARY); //阈值127 11 imshow("thresh_bin", thresh_bin); 12 Mat thresh_bin_inv; 13 threshold(src, thresh_bin_inv, 127, 255, THRESH_BINARY_INV); 14 imshow("thresh_bin_inv", thresh_bin_inv); 15 waitKey(); 16 return 0; 17 }