# 오늘도 젓갈의 날 ~
로베이 컵에 참여하는 것은 로봇이되는 것이기 때문에 로봇의 구체적인 기계 방식에 대해 이야기하지 말고 외부 세계와 통신하는 센서는 필수 불가결합니다. 외부 환경 데이터를 수집하고 처리하여 수행 할 수 있습니다. 다양한 기능.
간단한 모듈, 온도 및 습도 센서 DHT11에 대해 이야기하겠습니다.
DHT11 소개
DHT11은 온도 및 습도 측정을위한 저렴하고 사용하기 쉬운 투 인원 센서입니다. 그것은 초소형 크기와 극히 낮은 전력 소비의 특성을 가지고 있습니다. 단일 버스를 사용하여 단일 칩 컴퓨터로 양방향 직렬 데이터 전송을 수행하며 신호 전송 거리는 20m 이상에 달할 수 있습니다. 높은 정확도와 실시간이 필요하지 않은 온도 및 습도 측정 상황에 매우 적합합니다.
이 기사에서는 DFRobot 오픈 소스 하드웨어 플랫폼의 DHT11 모듈과 DFRduino 개발 보드를 보여주고 DHT11의 드라이버와 사용을 설명합니다.
DHT11 전기 매개 변수
전원 공급 장치 전압 : 3 ~ 5.5V (일반 값 : 5V);
온도 범위 : 0 ~ 50 ℃, 오류 ± 2 ℃;
습도 범위 : 20 ~ 90 % RH, 오류 ± 5 % RH;
샘플링 기간 : 더 큼 1 초 / 회 이상.
이 센서에는 VCC, GND 및 DATA라는 세 개의 핀이 있습니다. 이것은 단일 데이터 포트가있는 센서입니다. 데이터 포트는 양방향 전송에 사용됩니다.이 핀은 FPGA에서로 설정되어야합니다 inout.
작동 원리
DHT11은 통신을 위해 단일 버스를 사용하는데, 이는 DATA 핀과 마이크로 컨트롤러를 연결하는 라인입니다. 버스는 항상 유휴 상태 와 통신 상태 사이에 있습니다.
단일 칩 마이크로 컴퓨터가 DHT11과 상호 작용하지 않을 때 버스는 유휴 상태에 있고 풀업 저항의 작동하에 높은 수준의 상태에 있습니다.
MCU와 DHT11이 통신 중일 때 버스는 통신 상태이며 완전한 통신 과정은 다음과 같습니다.
① MCU는 버스를 구동하는 IO를 출력 모드로 구성합니다. DHT11로 데이터를 보낼 준비가되었습니다.
② 마이크로 컨트롤러는 시작 신호를 보내기 위해 최소 18ms 동안 버스를 아래로 당깁니다. 그런 다음 버스를 하이로 당기고 20 ~ 40us를 지연시켜 시작 신호의 끝을 나타냅니다.
③ 단일 칩 마이크로 컴퓨터는 DHT11에서 반환 된 데이터를 수신 할 준비가 된 입력 모드로 드라이브 버스의 IO를 구성합니다.
④ DHT11은 마이크로 컨트롤러에서 보낸 초기 신호를 감지하면 응답을 시작하고 수집 된 센서 데이터를 반환합니다. DHT11은 먼저 마이크로 컨트롤러에 대한 승인 (ACK)으로 버스를 80us 낮게 가져온 다음 수집 된 온도 및 습도 데이터를 반환 할 준비가 된 버스를 80us만큼 높입니다. 온도 및 습도 데이터는 고정 프레임 형식으로 전송됩니다.
프레임은 40 비트이고 각 비트의 전송 타이밍 로직은 다음과 같습니다. 각 비트는 50us의 로우 레벨 (DHT11이 버스를 로우로 끌어 옴)에 의해 주도되고 DHT11은 버스를 하이로 끌어옵니다. 26 ~ 28us는 로직 0을 나타내고, 70us 지속되면 로직 1을 나타냅니다.
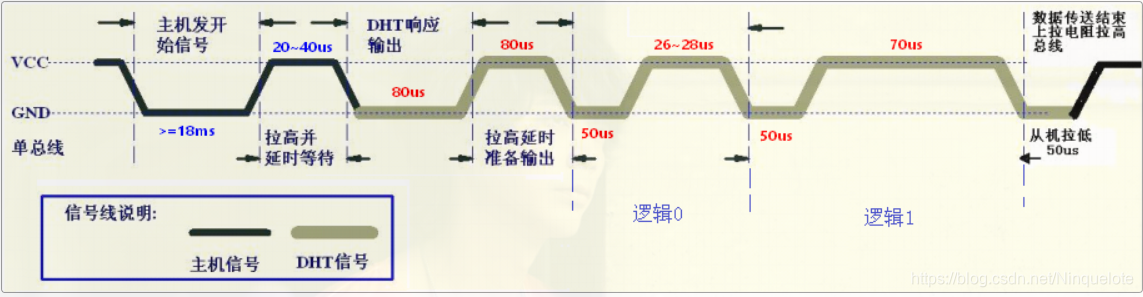
이 신호 다이어그램을 보면 모듈과 마스터 간의 통신 모드를 알 수 있습니다.
- 전원을 켠 후 1 초 동안 불안정한 상태를 지나갈 때까지 기다리십시오.
- IO는 신호 출력 모드이며 로우 레벨은 18ms 이상 지속됩니다. (20ms 권장)
- IO 레벨은 20 ~ 40us 동안 높게 설정됩니다. (30us 권장)
- IO는 신호 입력 모드이며 DHT 응답 시간으로 들어갑니다. (즉, 모듈은 마스터 컨트롤의 정보를 수신하고 데이터 전송 전 신호를 반환합니다.)
- 낮은 레벨은 80us를 지연시키고 레벨은 80us를 끌어 올려 DHT 응답을 완료합니다.
- 전송할 데이터 로직 0/1을 입력하고 40 비트 지속됩니다.
- 로직 0, 레벨은 50us 동안 풀다운되고 레벨은 25us 동안 풀업됩니다.
- 로직 1, 레벨은 50us에 대해 풀다운되고 레벨은 80us에 대해 풀업됩니다.
- 데이터 전송이 끝나면 버스가 하이로 당겨집니다. (여기에서 1 초 이상 지연된 후 다음 데이터 수집을 수행 할 수 있습니다.)
Verilog 드라이버 코드 :
// dht11
// made by 00
//time 2020.4.28
module dht11(
input clk,
input rst_n,
inout dht11,
output reg [31:0] data_valid
);
/**************parameter********************/
parameter POWER_ON_NUM = 1000_000;
parameter S_POWER_ON = 3'd0;
parameter S_LOW_20MS = 3'd1;
parameter S_HIGH_13US = 3'd2;
parameter S_LOW_83US = 3'd3;
parameter S_HIGH_87US = 3'd4;
parameter S_SEND_DATA = 3'd5;
parameter S_DEALY = 3'd6;
//reg define
reg[2:0] cur_state;
reg[2:0] next_state;
reg[20:0] count_1us;
reg[5:0] data_count;
reg[39:0] data_temp;
reg[4:0] clk_cnt;
reg clk_1M;
reg us_clear;
reg state;
reg dht_buffer;
reg dht_d0;
reg dht_d1;
wire dht_podge; //data posedge
wire dht_nedge; //data negedge
/*********************main codes*********************/
assign dht11 = dht_buffer;
assign dht_podge = ~dht_d1 & dht_d0; // catch posedge
assign dht_nedge = dht_d1 & (~dht_d0); // catch negedge
/*********************counters*****************************/
//clock with 1MHz
always @ (posedge clk or negedge rst_n) begin
if (!rst_n) begin
clk_cnt <= 5'd0;
clk_1M <= 1'b0;
end
else if (clk_cnt < 5'd24)
clk_cnt <= clk_cnt + 1'b1;
else begin
clk_cnt <= 5'd0;
clk_1M <= ~ clk_1M;
end
end
//counter 1 us
always @ (posedge clk_1M or negedge rst_n) begin
if (!rst_n)
count_1us <= 21'd0;
else if (us_clear)
count_1us <= 21'd0;
else
count_1us <= count_1us + 1'b1;
end
//change state
always @ (posedge clk_1M or negedge rst_n) begin
if (!rst_n)
cur_state <= S_POWER_ON;
else
cur_state <= next_state;
end
// state machine
always @ (posedge clk_1M or negedge rst_n) begin
if(!rst_n)
begin
next_state <= S_POWER_ON;
dht_buffer <= 1'bz;
state <= 1'b0;
us_clear <= 1'b0;
data_temp <= 40'd0;
data_count <= 6'd0;
end
else
begin
case (cur_state)
S_POWER_ON : //wait
begin
if(count_1us < POWER_ON_NUM)
begin
dht_buffer <= 1'bz;
us_clear <= 1'b0;
end
else
begin
next_state <= S_LOW_20MS;
us_clear <= 1'b1;
end
end
S_LOW_20MS: // send 20 ms
begin
if(count_1us < 20000)
begin
dht_buffer <= 1'b0;
us_clear <= 1'b0;
end
else
begin
next_state <= S_HIGH_13US;
dht_buffer <= 1'bz;
us_clear <= 1'b1;
end
end
S_HIGH_13US: // Hign 13 us
begin
if (count_1us < 20)
begin
us_clear <= 1'b0;
if(dht_nedge)
begin
next_state <= S_LOW_83US;
us_clear <= 1'b1;
end
end
else
next_state <= st_delay;
end
S_LOW_83US:
begin
if(dht_podge)
next_state <= S_HIGH_87US;
end
S_HIGH_87US: // ready to receive data signal
begin
if(dht_nedge)
begin
next_state <= S_SEND_DATA;
us_clear <= 1'b1;
end
else
begin
data_count <= 6'd0;
data_temp <= 40'd0;
state <= 1'b0;
end
end
S_SEND_DATA: // have 40 bit
begin
case(state)
0: begin
if(dht_podge)
begin
state <= 1'b1;
us_clear <= 1'b1;
end
else
us_clear <= 1'b0;
end
1: begin
if(dht_nedge)
begin
data_count <= data_count + 1'b1;
state <= 1'b0;
us_clear <= 1'b1;
if(count_1us < 60)
data_temp <= {
data_temp[38:0],1'b0}; //0
else
data_temp <= {
data_temp[38:0],1'b1}; //1
end
else //wait for high end
us_clear <= 1'b0;
end
endcase
if(data_cnt == 40) //check data bit
begin
next_state <= st_delay;
if(data_temp[7:0] == data_temp[39:32] + data_temp[31:24] + data_temp[23:16] + data_temp[15:8])
data_valid <= data_temp[39:8];
end
end
S_DELAY: // after data received delay 2s
begin
if(count_1us < 2000_000)
us_cnt_clr <= 1'b0;
else
begin
next_state <= S_LOW_20MS; // send signal again
us_cnt_clr <= 1'b1;
end
end
default :
cur_state <= cur_state;
endcase
end
end
//edge
always @ (posedge clk_1M or negedge rst_n) begin
if (!rst_n) begin
dht_d0 <= 1'b1;
dht_d1 <= 1'b1;
end
else begin
dht_d0 <= dht11;
dht_d1 <= dht_d0;
end
end
endmodule Pro-test 가능합니다. 댓글이 모두 영어로되어있는 이유는 코드를 작성할 때 영문 키보드를 열고 중국어를 쓸 수 없어 중국어 기호의 실수를 피할 수 있기 때문입니다.
물리적 테스트

이것은 Robei Cup 대회에서 사용될 예정이지만, RISC-V 아키텍처를 사용하려면 Xilinx를 사용하여 하드 코어를 조정해야하기 때문에 Xilinx 또는 Altera의 보드를 사용할지 여전히 얽혀 있습니다. 아직 할 수없는 것 같아서 먼저 구조를 구축 한 다음 RISC-V로 구현할 수 있는지 확인하려고합니다.