DSO初始化过程分析
将单目dso与双目dso初始化过程进行分析
单目dso初始化
1、程序一开始,读取图片,经过处理进入addActiveFrame()(Fullsystem.cpp)函数。
2、然后将其加入帧历史窗口中,这里初始化位姿为SE3():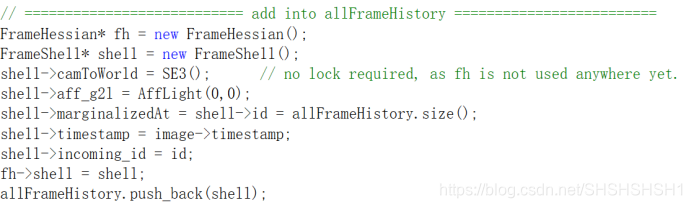
3、进行图像金字塔处理

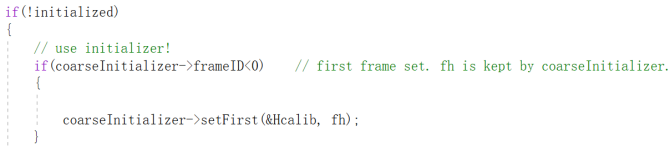
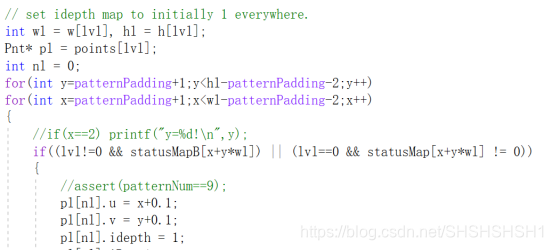
4、如果是第一帧,则进入setFirst()进行处理
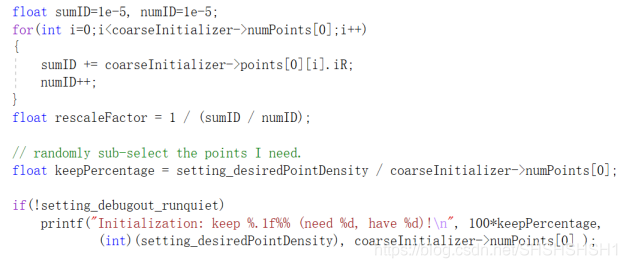
涉及到选点,逆深度设置为1,初始化位姿

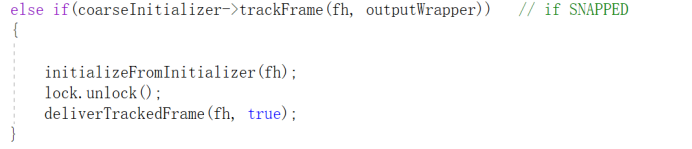
5、第二帧先交给trackFrame()处理,如果处理完再进入initializeFromInitializer(),再作为关键帧传入makekeyframe处理
trackFrame()
如果snapped==false,则将第一帧选出的点深度设置为1
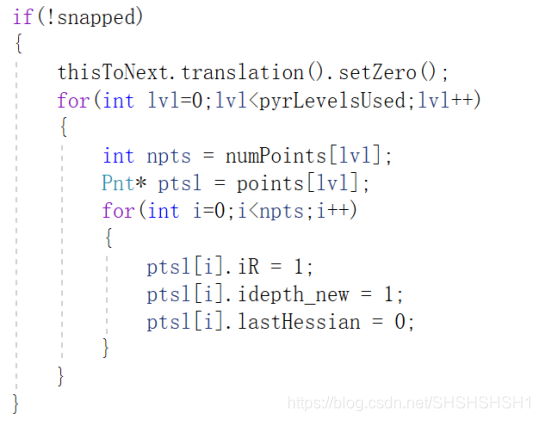
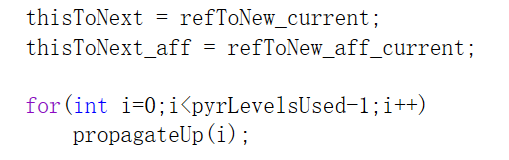
暂存thisToNext位姿
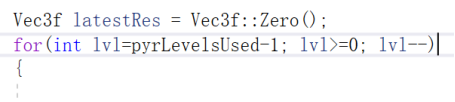
然后对金字塔从高层到低层进行匹配
先通过calcResAndGS()计算一次 residual(残差), Hessian() and Hessian-block neede ,得到resold
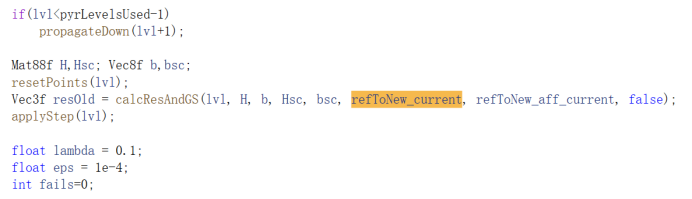
再进入高斯牛顿法,每一层都是
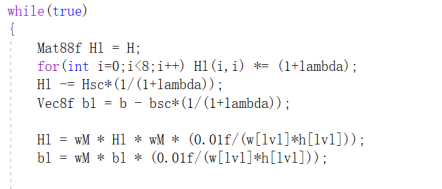
之后先计算inc,再计算出相对位姿,初步计算
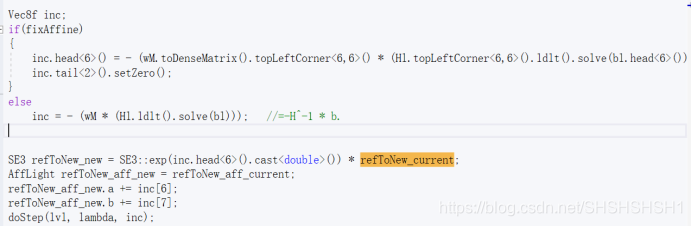
再利用计算出来的相对位姿,通过calcResAndGS()计算一次 residual(残差), Hessian() and Hessian-block neede ,得到resnew

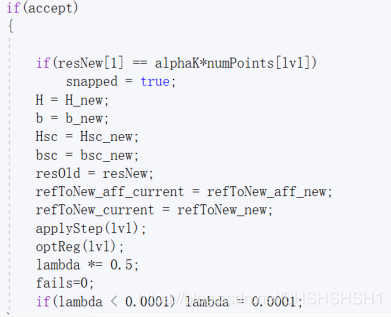
如果新能量更低,则接受这次位姿优化
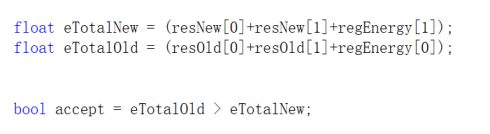
反之则不接受
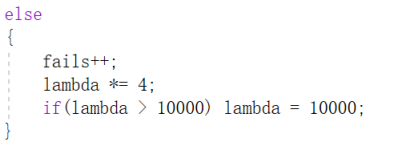
跳出高斯循环条件
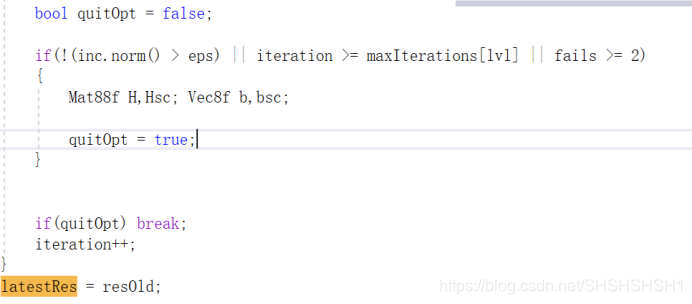
所有金字塔遍历后,得到最终位姿
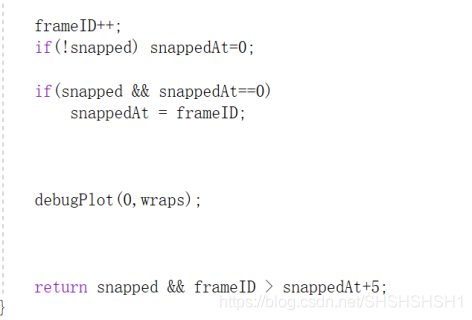
之后是判断是否trackeframe成功,流程应该是开始snapped=0,snappedAt=0,frameID=0在金字塔的高斯匹配中,如果被接受了一次,则snapped=1,然后snappedAt=frmaeID+1;则需要之后再读入6帧,则trackframe成功。
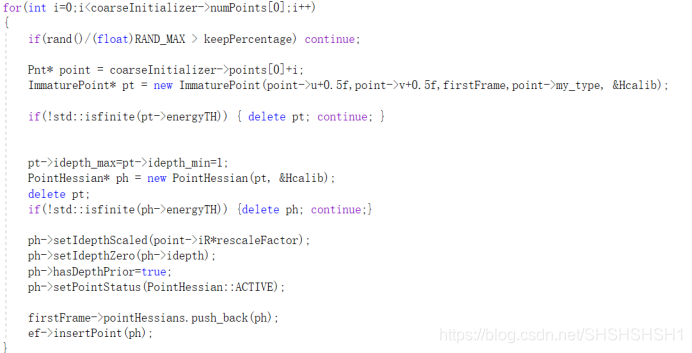
之后进入initializeFromInitializer()函数,进行成熟点的选择
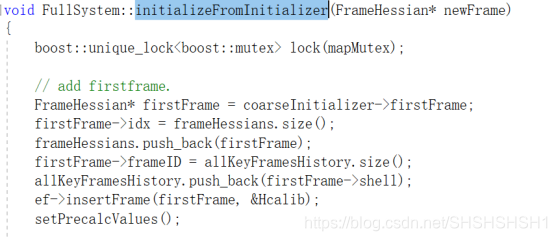
之后将trackFrame()优化的位姿暂存

在对头两帧进行配置,第一帧位姿为SE3(),第二key帧为优化的相对位姿
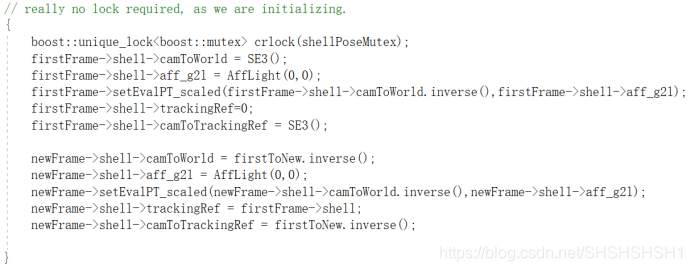
然后初始化成功

