0.前言
本文根据HowToMechatronics1网站中的介绍MEMS加速度计、陀螺仪和磁强计的文章翻译和补充得来。
1. MEMS加速度计
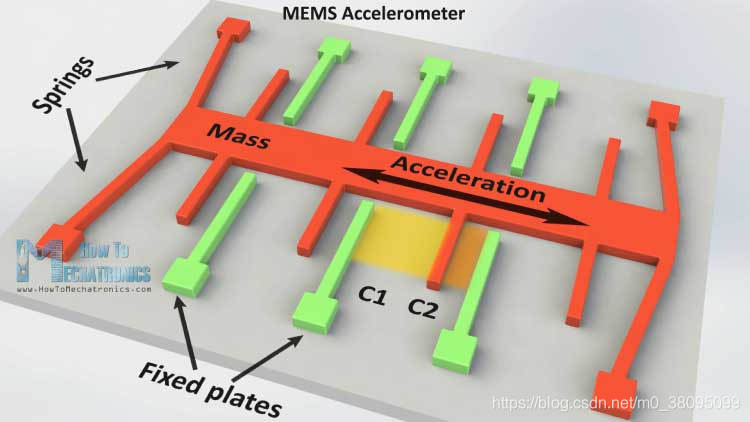
1MEMS加速度计的原理简图如下图所示,其中质量块mass被弹簧springs支撑,使得其只能沿着预定方向位移,从而检测特定方向的加速度;绿的部分是固定的电极板Fixed plates。检测原理是当质量块感受到加速度时,会在相应方向产生位移,从而使得固定电极板构成的两个平行板电容器C1,C2的电容大小发生改变,检测其电容值大小即可换算成相应的加速度。
2. MEMS陀螺仪
MEMS陀螺仪的检测原理与MEMS加速度计类似,不过需要用到一种叫做科里奥利效应(Coriolis Effect)所对应的科里奥利力(Coriolis Force)。
以下内容引自维基百科 科里奥利力。
科里奥利力来自于物体运动所具有的惯性,在旋转体系中进行直线运动的质点,由于惯性的作用,有沿着原有运动方向继续运动的趋势,但是由于体系本身是旋转的,在经历了一段时间的运动之后,体系中质点的位置会有所变化,而它原有的运动趋势的方向,如果以旋转体系的视角去观察,就会发生一定程度的偏离。
如上图所示,当一个质点相对于惯性系做直线运动时,相对于旋转体系,其轨迹是一条曲线。立足于旋转体系,我们认为有一个力驱使质点运动轨迹形成曲线,这个力就是科里奥利力。
根据牛顿力学的理论,以旋转体系为参照系,这种质点的直线运动偏离原有方向的倾向被归结为一个外加力的作用,这就是科里奥利力。从物理学的角度考虑,科里奥利力与离心力一样,都不是真实存在的力,而是惯性作用在非惯性系内的体现。
科里奧利力的計算公式如下:
式中 为科里奥利力;m为质点的质量; 为质点的运动速度; 为旋转系的角速度; 表示两个向量的叉积(外积)符号。
有了以上关于科里奥利力的介绍,再看陀螺仪的原理就很容易了。如下图所示,绿色箭头表示输入的角速度,右手螺旋一握可知,绿色箭头内的虚线往上为角速度方向;红色箭头表示质量块的驱动速度,由此产生的科里奥利力为蓝色箭头,其方向可以参考上面公式
,右手由角速度方向(虚线向上)握向速度(红色箭头)的反向(蓝色箭头)。

下面介绍陀螺仪内部的原理简图。如下图所示,仔细看三个有字的地方,左边是驱动质量块运动的方向driving direction,右边是输入角速度方向,中间是质量块以及传感器的敏感方向。
由于引入了科氏力(科里奥利力),容易解释质量块在传感方向上会产生位移,由此引起平行板电容器电容值的改变,检测电容值即可换算得到输入的角速度。

注意:驱动方向是来回往复的,质量块在驱动方向的位移可以用一个方程来描述,类似2

对上式关于时间求导可以得的驱动速度
,由于质量块质量
已知,将其都代入
中可知,只需检测出科氏力
即可得到输入的角速度
。再进一步,将上式左右除质量m,可以得到哥氏加速度
,于是问题就转换为了检测加速度。从这点可以看出,MEMS陀螺仪是对加速度敏感的,因此其数据手册里误差项一般会有相应的指标。
3. MEMS磁强计
1它利用霍尔效应或磁阻效应测量地球磁场。实际上,市场上几乎90%的传感器都使用霍尔效应,下面是它的工作原理。
如果我们有一个下图中所示的导电板,我们设置电流流过它,电子会直接从板的一边流到另一边。

现在,如果我们在平板附近加一些磁场,我们就会扰乱电子的直线流动,电子会偏转到平板的一侧,而正电荷(空穴)会偏转到平板的另一边。也就是说,如果我们现在把电表放在两边之间,我们会得到一些电压,这取决于磁场的强度和方向,检测这个电压就可换算成磁场的强度和方向。

市场上其他10%的传感器使用磁阻效应。这些传感器使用对磁场敏感的材料,通常由铁(Fe)和镍(Ne)组成。因此,当这些材料暴露在磁场中时,它们的电阻就会改变。
有关MEMS传感器的文献搜罗了几篇,上传到了网盘,有需要的可以下载。
链接:https://pan.baidu.com/s/1NTqy4Ne6oNckIYLrXgR25A
提取码:ayc4
