第三章 3腿式机器人动力学分析基础
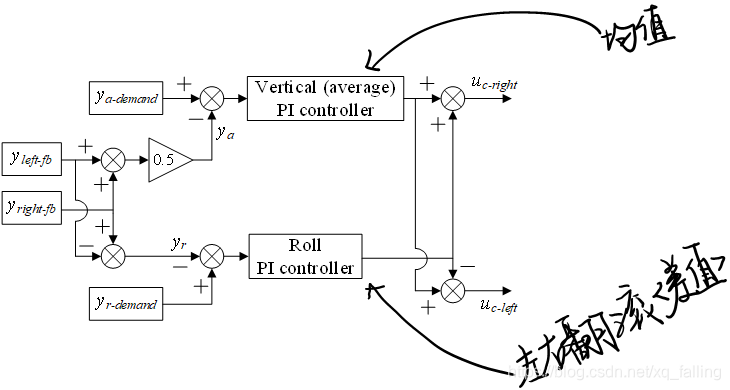
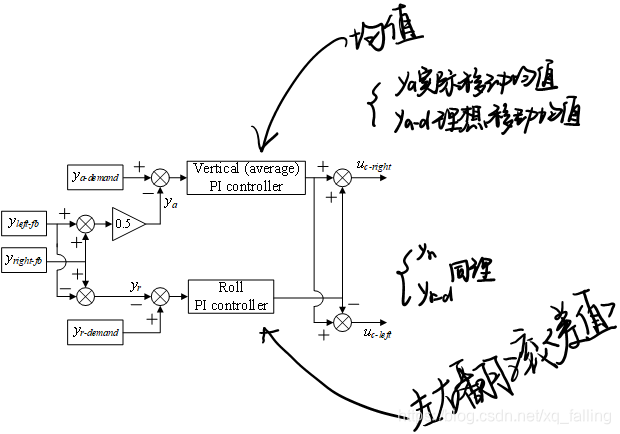
3.1 如何控制腿式机器人?——控制器
- 对腿部执行器进行闭环位移控制
- Proportional-integral 控制器——pi控制器相较与现在的深度学习之类的等等技术都要可靠的多,工业常用
- 模态控制器
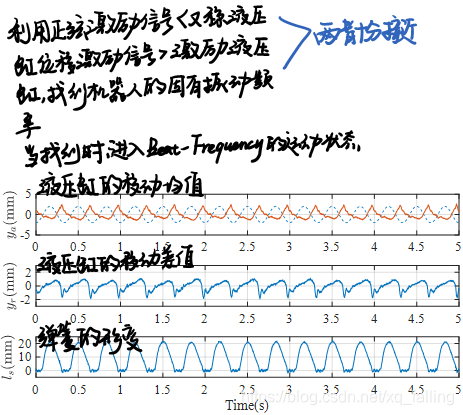
3.2 如何让腿式机器人跳动起来?——利用正弦激励信号
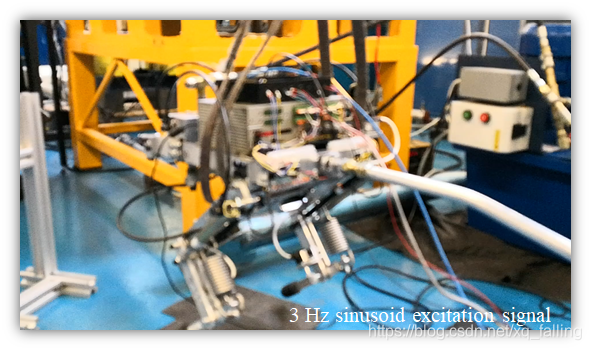
- 固有频率3 Hz
- 弹簧型变量连续且均匀
- 身体姿态存在左右摇晃
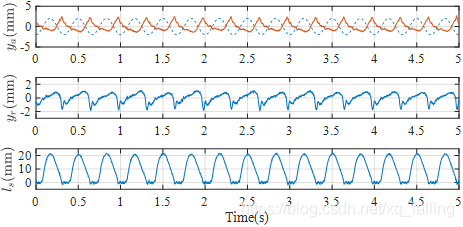
3.3 跳动起来后,如何控制腿式机器人的跳动高度?——位移,速度,加速度,力
对弹跳高度的控制,可以从以下几个方面考虑:
- 位移(position)
- 速度(velocity)
- 加速度(acceleration)
- 力(force/pressure)
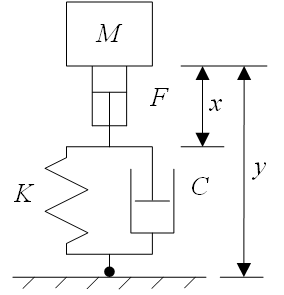
在着地阶段,对质量块M进行受力分析可得:
MY’’=C(Y’-X’)+K(Y-X)-Mg-注:“ ‘ ” 微分
X液压缸位移
YM重物位移
C阻尼系数 -常数KG/S
