3.1测距传感器:
直接测量机器人到其邻区物体的距离。 机器人的障碍监测和避障严重依赖于测距传感器。同时,这类传感器 所提供的局部自由空间的信息也会被用来支撑机器人定位和环境建模 (3D成像)

3.2两种主流方案:
3.2.1飞行时间(TOF)
3.2.1.1三种飞行时间(Time of Flight) 的有源测距传感器
- 超声传感器(Sonar)
- 激光测距仪(Laser range finder)
- 飞行时间摄像头(Time of Flight Camera)

3.2.1.2如何飞行时间测距
飞行时间测距:利用声音或者电磁波的传播速度,其行进距离
- d:行进距离(通常是往返)
- c:传播速度
- t:飞行时间
飞行时间测距传感器的关键:
- 飞行时间测量的不准确性(激光测距传感器)
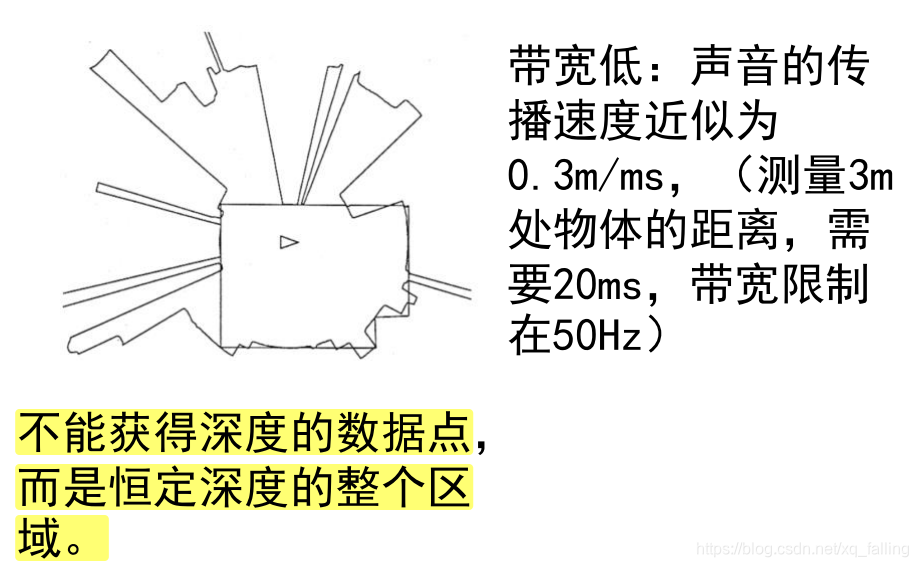
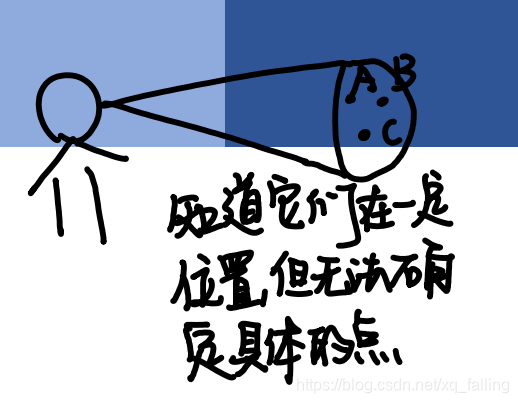
- 发射术的传播圆锥体(超声测距传感器)
- 与目标的交互(表面吸收和特殊反射)
- 传播速度的变化
- 机器人和目标的速度(动态目标的情况下)
需要重点指出的是:
- 声音的传播速度近似为0.3m/ms
- 电磁波的传播速度近似为0.3m/ns
- 电磁波比声音的速度快近100万倍 采样频率会非常高
- 测量电磁波信号的飞行时间是非常具有挑战性的(3m,10ns)
- 激光测距仪是非常贵也非常精密的
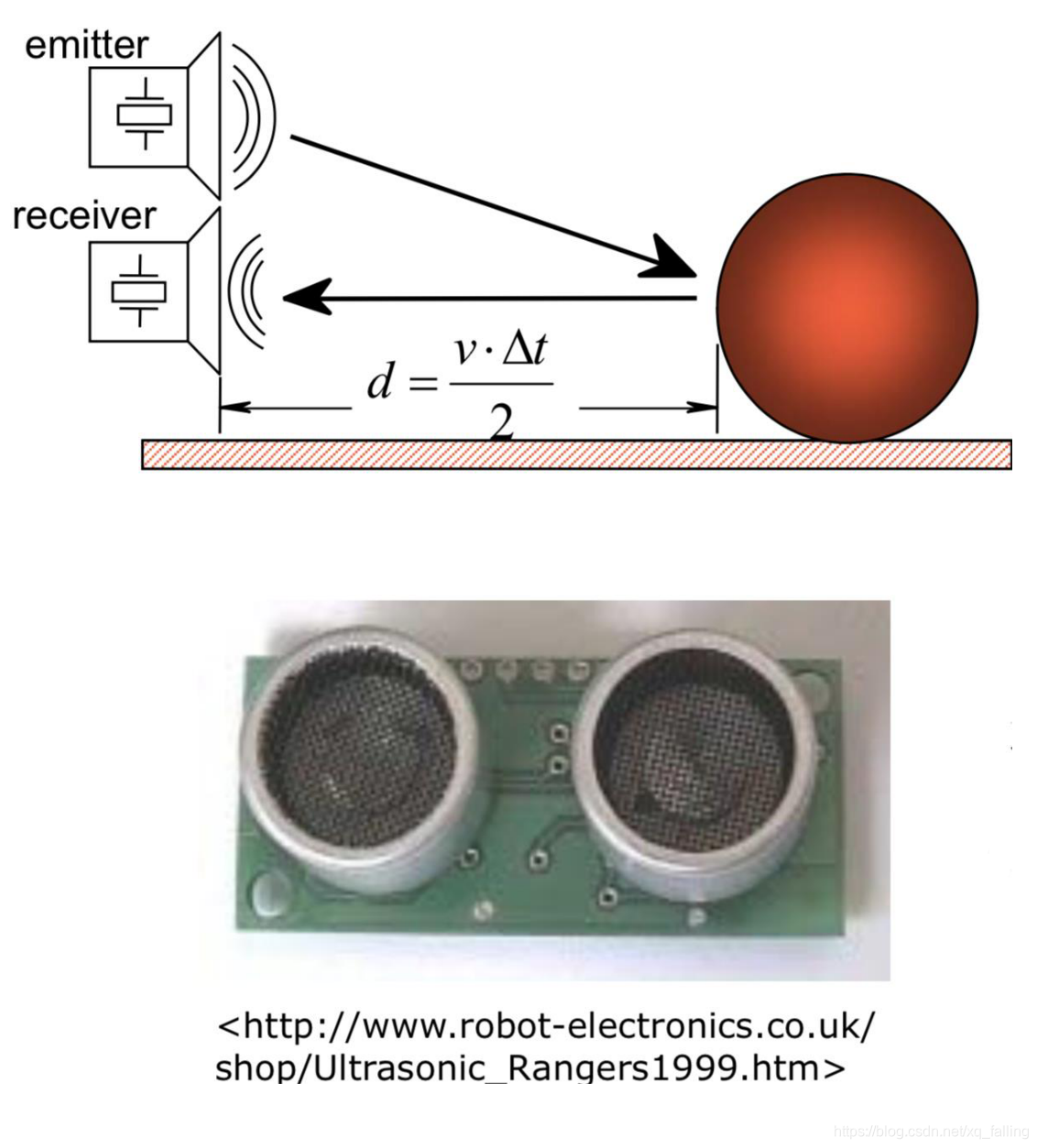
3.2.1.3有源测距传感器——飞行时间测距——超声传感器1D
特性:有效距离12cm到5m之间; 准确度98%到99.1%之前; 分辨率近似可达2cm; 相对来说价钱便宜。精度容易受到被测距物体材料的声学性质所影响。
3.2.1.3有源测距传感器——行时间测距——激光测距仪
3.2.1.4有源测距传感器——飞行时间测距——2D激光测距仪
3.2.1.5有源测距传感器——飞行时间测距——3D激光测距仪
3D激光测距仪一种典型的激光扫描仪,它在一个以上的平面中获取扫描数据。 如:围绕平行于扫描面的轴,以步进或连续的方式上下摆动或旋转一个2D扫描仪。
如右图中用Sick公司的激光距离传感器定制 的3D扫描仪(360° 方位角、90°仰角)。 若该3D扫描仪每秒可获取75个垂直面的扫描, 那么为了达到0.25°的方位角分辨率,旋转台旋转半周所需要的时间为多少? 360/2/0.25/75=9.6s

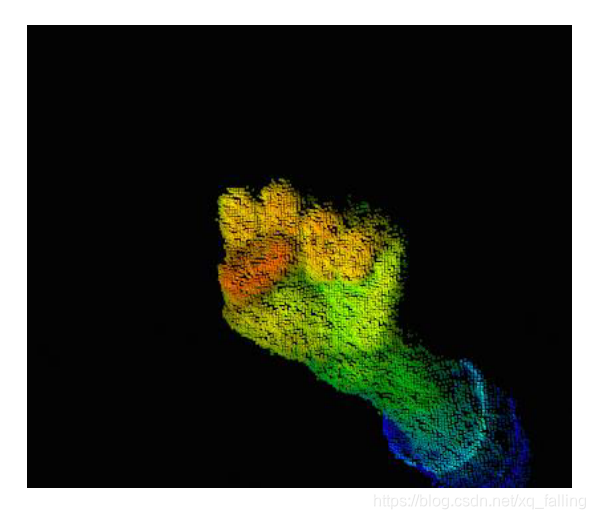
激光雷达(LiDAR, Light Detection And Ranging)通过水平旋转扫描或相控扫描测角度,并根据这两个数据建立二维的极坐标系;再通过获取不同俯仰角度的信号获得第三维的高度信息。
高频激光可在一秒内获取大量的位置点信息(称为点云),并根据这些信息进行三维建模。
3.2.1.6有源测距传感器——飞行时间测距——ToF摄像头
ToF摄像头(ToF Camera)
ToF 摄像头利用飞行时间测量原理来确定摄像头与物体或周围环境之间距离,并通过测量的点生成深度图像或 3D 图像。
特性:结构简单、价格便宜,但是有效距离比激光雷达要短,不能检测光学上透明的物体。

3.2.2有源测距传感器——三角测量(Triangulation)
基于三角测量的有源测距:通过把已知的光模式(例如,点、线和纹 理)投射到环境中,通过接收器捕获反射的光,并与已知的几何值合在一起,再通过简单的三角几何关系建立距离的测量。
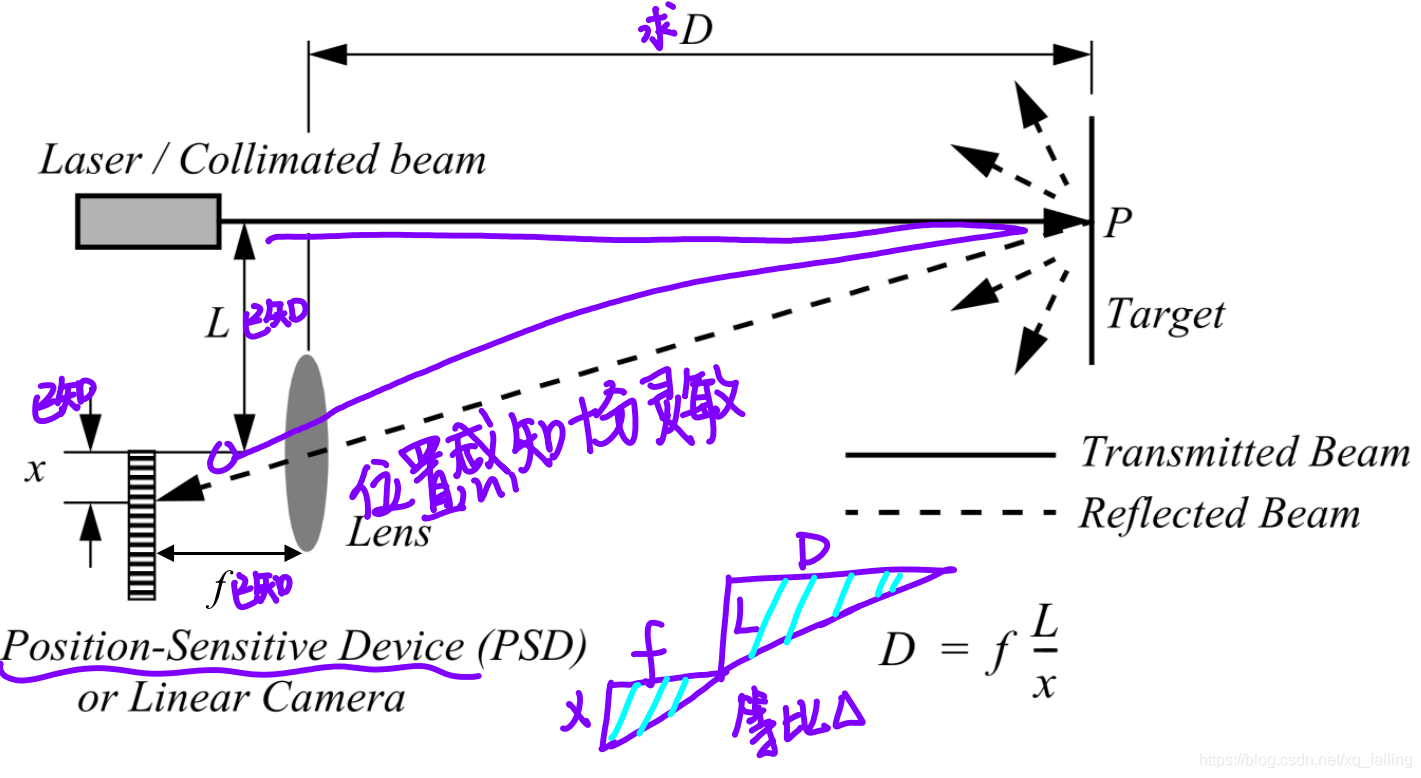
3.2.2.1 1D光学三角测量传感器
1D光学三角测量传感器:接收器(线性摄像机、位置敏感器件PSD) 沿着单个轴测量反射的位置。
特性:分辨率较高(近距离)、带宽比超声传感器要高、 比超声和激光测距传感器都便宜, 但是有效距离非常短。
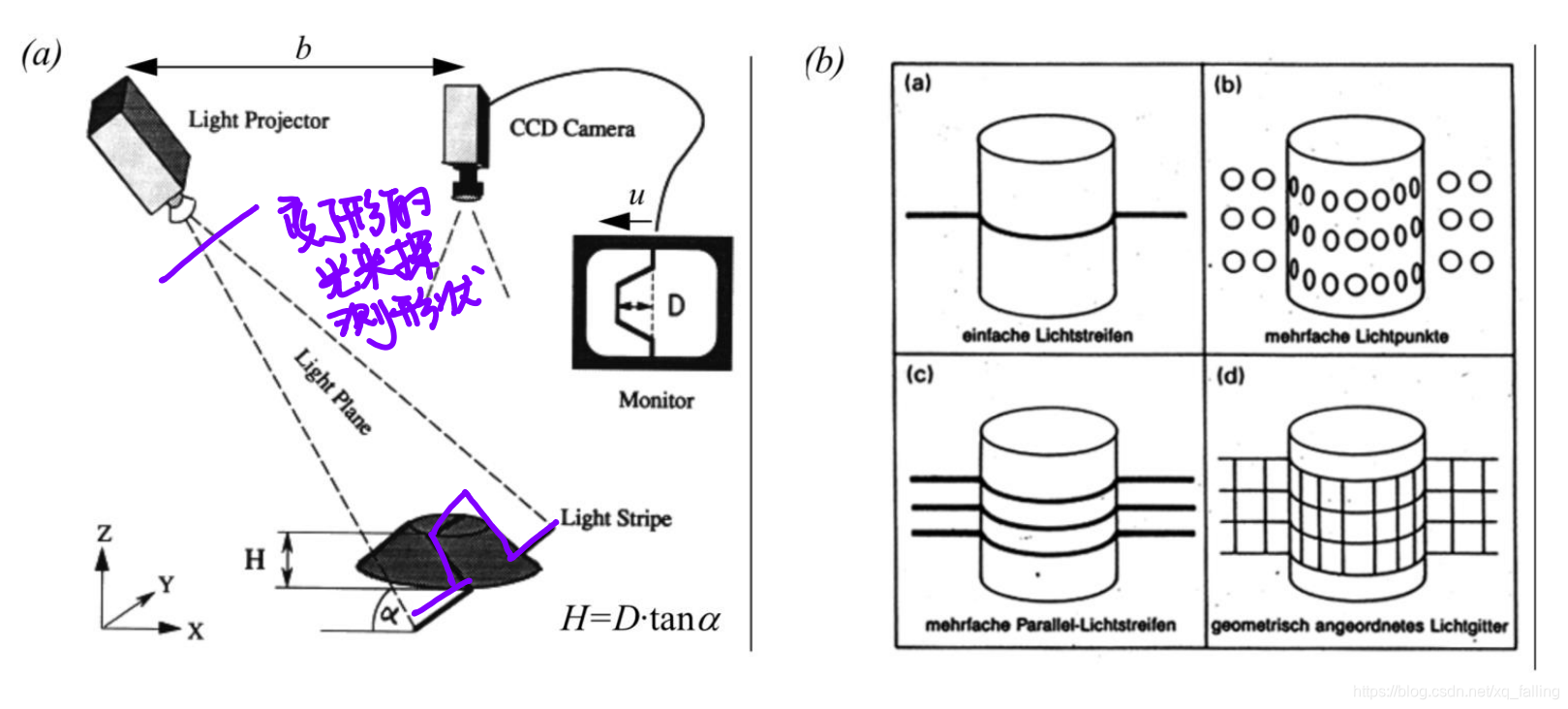
3.2.2.2 2D光学三角测量传感器(结构光传感器)
2D光学三角测量传感器(结构光传感器):接收器采用2D接收器(如用CCD或CMOS摄像机),来对一个阵列的点进行距离测量。关键在于: 必须将已知模式的光(结构光)投射到环境中。
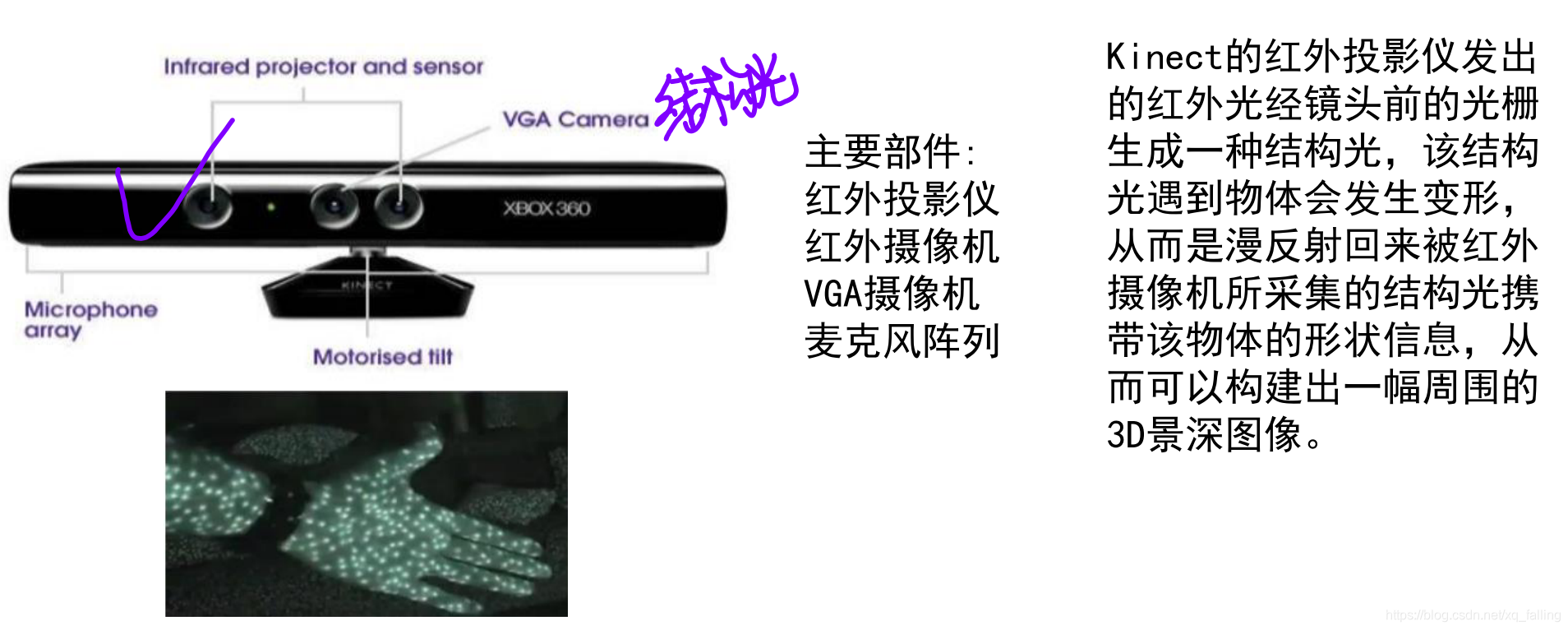
3.2.2.3 有源测距传感器——3D成像
测距传感器:直接测量机器人到其邻区物体的距离。
两种主流方案:飞行时间(TOF)和结构光(Structured Light)。
