基于POS数据的车载面阵CCD影像与激光点云融合处理研究
该系统主要集成了全球定位系统(GPS),惯性测量单元(IMU),LS,CCD等新型传感器,其中,GPS和IMU构成POS传感器,主要重点介绍融合的基本原理。融合的基本原理是:
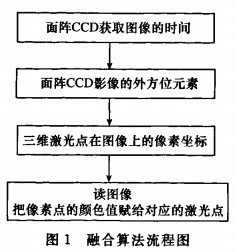
- 首先根据系统时间同步控制器,系统空间检校数据以及POS数据,利用自行设计的程序算法,解算出面阵CCD获取的每幅图像的外方位元素;
- 然后利用共线方程得到激光点在图像上的像素坐标;
- 最后把对应像素的颜色属性值赋值给点云数据,得到的就是具有真实颜色属性的底物激光点云图。
具体融合算法流程图如图所示:
基于共线原理的全景影像真彩色点云生成算法实现
- 在程序中加载激光点云,全景影像,相机文件三种类型;
- 为待赋颜色的激光点云数据选择合适的全景影像。
- 计算出点云所对应的全景球上某处像点像素坐标,将该像素坐标处的RGB颜色值赋给点云;
- 在点云分块的前提下,重复步骤2-3步进行迭代,遍历整个目标区域,得到整个目标区域的真彩色点云成果。只是使用激光雷达扫描出的激光点云图如下图1所示。

图1 原始激光点云
原始激光点云通过共线算法原理获得对应全景影像出的准确空间对应关系,实现原始点云的准确赋色,从而得到空间位置准确,色彩表现客观真实的真色彩点云,从而验证了算法的可行性。经过试验验证,生成的真彩色点云图如图2所示。

图2 真彩色点云图
虽然原始点云图与真彩色点云图是从不同角度拍摄的该街区,但是我们也可以清晰的看出来所谓的真彩色点云图是使用原始点云根据相机拍摄的图像,进行RGB着色,进而形成真彩色点云,个人理解完成基于激光的三维重建过程,对三维激光的进一步发展做出了不可磨灭的贡献,这主要是理论部分的描述,后期我将通过具体的项目进行实验验证。
文中若有不对的地方,还望各位多多指教,谢谢